一、前言
随着科技的发展,我们经常看到有人用平衡车代步、使用无人机进行航拍。但这些是怎么实现的呢?平衡车和无人机在使用的时候是怎样保持平衡与稳定的呢?
其实,平衡车和无人机在内部都用到陀螺仪传感器和加速度计传感器,用来检测车体的姿态以及运动时发生的变化,再通过各方面的共同协调配合,从而保持平衡车和无人机的平衡与稳定。本章主要介绍MPU6050的原理及应用。
二、MPU6050简介
MPU6050是6轴运动处理传感器,它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。使用它就是为了得到待测物体(如四轴飞行器、平衡小车)x、y、z轴的倾角(俯仰角Pitch、翻滚角Roll、偏航角Yaw)。我们通过 I2C 读取到 MPU6050 的六个数据(三轴加速度 AD 值、三轴角速度 AD 值)经过姿态融合后就可以得到 Pitch、Roll、Yaw角。
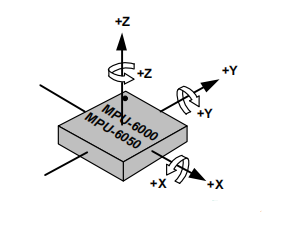
作为测量值的方向参考,传感器坐标方向定义如上图所示,属于右手坐标系(右手拇指指向 x 轴的正方向,食指指向 y 轴的正方向,中指能指向 z 轴的正方向)。
MPU6050与MPU6500的区别讲解:
三、MPU6050原理
传感器在它的内部有一个陀螺,因为陀螺效应始终与初始方向平行,这样就能通过与初始方向的偏差计算出旋转方向与角度。
(2)加速度计传感器(Accelerometer Sensor)
加速度传感器是一种能够测量加速度的传感器。它采用的是压电效应的原理。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获取加速度值。
(3)数字运动处理器(Digital Motion Processor)
DMP是MPU6050芯片中的数据处理模块,(内置卡尔曼滤波算法)获取陀螺仪和加速度传感器数据,并处理输出四元数,可以减轻外围微处理器的工作负担且避免了繁琐的滤波和数据融合。
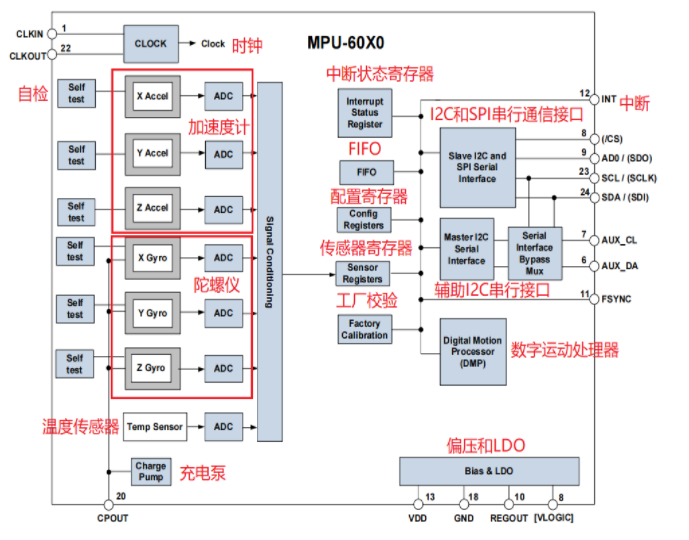
四、MPU6050系统结构图
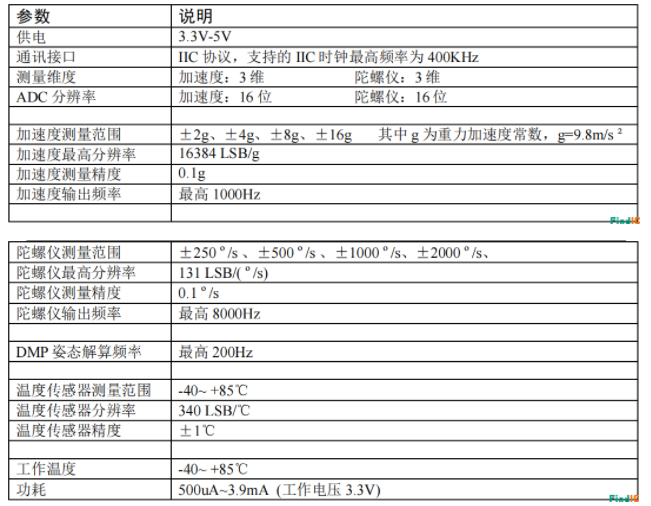
五、MPU6050特性参数
六、MPU6050引脚输出和信号描述
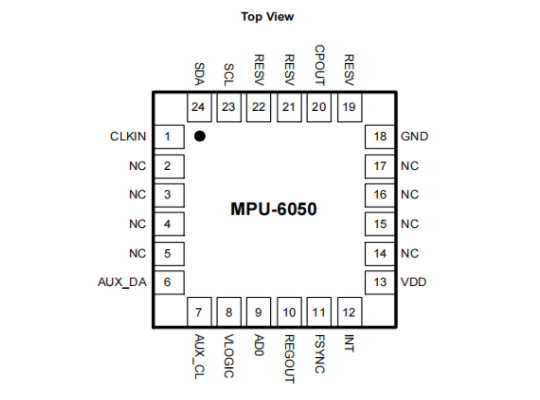
图 1 MPU6050引脚图
表 1 引脚输出与信号描述

七、MPU6050姿态获取与处理
理论上只用陀螺仪就可以完成姿态导航的任务,只需要对3个轴的陀螺仪角度进行积分,得到3个方向的旋转角度的姿态数据,就可以了。但实际上存在着误差噪声等,对陀螺仪积分并不能得到完全准确的姿态,所以我们就需要用加速度计传感器进行辅助矫正。
(1)数据获取
1、MPU6050的陀螺仪采集物体转动的角速度信号,通过ADC(interwetten与威廉的赔率体系 数字转换器)转换成数字信号采集回来。再通过通信传输给单片机。
2、加速度计则是采集物体加速度信号,并传输回来。
(2)数据处理
通过以上的步骤,我们可以分别得出线加速度传感器与角加速度传感器的数据,接下来就要进行数据的处理与融合。
具体步骤如下
1、校准数据(零点漂移):传感器安装在设备上总有一个初始的角度,我们设这个角度为0度,我们每一次的数据都要减去这个初始数据,得到一个相对的角度。
2、把测量值换算成相应的单位:原始数据除以它在该量程下的灵敏度就可以获得实际的物理单位。加速度的物理单位为g,角速度的物理单位为°/s。
3、滤波和数据融合:常见方法有三种:互补滤波、卡尔曼滤波、硬件DMP解算四元数。
——互补滤波:因为加速度计有高频噪声,陀螺仪有低频噪声,需要互补滤波融合得到较可靠的角度值。
——卡尔曼滤波:利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
——硬件DMP解算四元数:DMP将原始数据直接转换成四元数输出,运用欧拉角转换算法,从而得到yaw、roll和pitch。
八、总结
姿态传感器在电子产品中处处可见,在平衡车和无人机最为常见。在自主移动机器人中,通过姿态传感器能获取机器人的位姿信息是非常关键的,它会影响到机器人的运功规划及运行状态。