
 无人驾驶汽车测试方案分析 - 全文
无人驾驶汽车测试方案分析 - 全文
无人驾驶汽车,也称自动驾驶汽车,是通过车载传感系统感知道路环境、自动规划行车路线并自主控制到达预定目标的交通工具。
据了解,目前全球有多家企业涉足无人驾驶汽车领域,其中既包括奔驰、宝马、奥迪、丰田这样的传统汽车厂商,也包括谷歌这样的互联网巨头。在国内,除了百度较早涉足外,北汽、广汽、上汽、长安、比亚迪5家汽车厂商也已在无人驾驶汽车这一领域深耕多年。
目前,国外车企中,奥迪进行了目前全球最长行程的无人驾驶汽车路测,奔驰、宝马在此之前也完成了封闭条件下的无人车系列测试,特斯拉则已经将自动识别路标、自动跟随等源自无人驾驶汽车的威廉希尔官方网站 ,植入其量产车型。基于人工智能研究推进无人驾驶汽车研发的谷歌,其试验车的测试里程累计已超过100万公里。
业内人士预测,到2020年,具有自动驾驶系统功能的无人驾驶汽车将逐渐上市;到2025年,无人驾驶汽车将进入“快速成长期”,就像智能手机成为“街机”一样,届时智能汽车也将成为“街车”。
想要实地测试无人驾驶汽车,是一件很棘手的事情。就算你之前已经测试了上百万公里,但是依然无法保证能够应对现实世界中出现的各种危险。
一些指标非常的重要,包括碰撞、受伤(严重程度)和“突发事件”的可能性。
早在上世纪70年代,欧美等汽车发达国家便开始对无人驾驶汽车进行研究,到今天已经发展出了多个针对无人驾驶各项威廉希尔官方网站 研究的应用测试场景。目前,世界上已经建立多个相关测试基地与测试道路,例如美国的Mcity、欧洲的ITS走廊等。各国都力求在保证安全的前提下,丰富无人驾驶汽车的测试场景,提升智能网联汽车的研发速度。
无人驾驶汽车测试案例1:无人驾驶虚拟之城Mcity
在无人驾驶汽车测试场的建设方面,美国走在世界前列。2015年7月20日,由密歇根大学主导、密歇根州交通部支持的无人驾驶虚拟之城Mcity正式对外开放。它位于密歇根州的安娜堡市,占地12.9万平方米,由密歇根大学和密歇根州交通部共同出资1000万美元,是世界上第一座专为测试无人驾驶汽车及V2V/V2I车联网威廉希尔官方网站 打造、经过环境变量控制设计的interwetten与威廉的赔率体系 小镇。
Mcity中有数英里长的两车道、三车道和四车道公路,还有交叉路口、交通信号灯以及指示牌,人行道上有长凳和街灯将公路和建筑隔离开来。从外表上看,这里就像是一个精心打造的好莱坞外景地。Mcity主要由2013年成立的密歇根大学交通改造研究中心设计,从去年开始正式投入建设,目前参与该项目的汽车企业包括福特、通用、本田、日产、丰田等。
虽然密歇根州早在2013年便允许无人驾驶汽车进行公路测试,但出于安全方面的考虑仍然建设了Mcity。密歇根大学交通改造研究中心工作人员表示,这主要是考虑到在无人驾驶威廉希尔官方网站 足够可靠之前,将其放置在一个相对封闭的模拟环境中进行测试,能够最大限度地降低因不可避免事故造成的人员伤亡。
无人驾驶汽车测试案例2:美国弗吉尼亚无人驾驶汽车测试专用道路
美国弗吉尼亚州计划在北部地区划出一条70英里(112公里)长的公路用于测试无人驾驶汽车,这条道路被称为“弗吉尼亚无人驾驶走廊”,任何计划在弗吉尼亚州进行测试的无人驾驶汽车都必须首先在这条智能道路上进行测试。
无人驾驶汽车测试阶段的安全问题,是美国各州关注的焦点。现在,加利福尼亚和佛罗里达等州都允许测试无人驾驶汽车。汽车通过测试后,在真正上路测试时还要有司机在车上,以防出现故障和意外情况。
无人驾驶汽车测试案例3:加拿大安大略省对无人驾驶车辆测试开放所有道路
相对于其他国家为无人驾驶车辆单独建设测试场与测试道路,加拿大则直接将一个省的道路用作无人驾驶研究测试。加拿大安大略省表示,由于无人驾驶及与高科技相衔接的汽车威廉希尔官方网站 可以提升燃油的经济性,并缓解交通拥堵、减少温室气体的排放、提升车辆行驶的安全性,安大略省将成为加拿大首个允许无人驾驶威廉希尔官方网站 测试的省份。而奔驰、谷歌以及特斯拉等公司预计很快将在这里开启无人驾驶威廉希尔官方网站 试验。
对于安全,安大略省方面表示,无人驾驶无人汽车试验项目推行期间,他们将确保省内道路如常维持安全。不过,虽然无人驾驶的车辆可以在任何时间在安大略省的任何路段行驶,但项目参加方却仅限于汽车生产厂家、威廉希尔官方网站 公司、学术研究组织以及涉及无人驾驶威廉希尔官方网站 的零部件公司。而且,无人驾驶汽车需要有一位拥有驾驶执照的司机在车内把关,相关公司还需要预先投保至少500万美元。
长安长达2000公里的无人驾驶汽车“超级测试”
据了解,此次上路的长安无人驾驶汽车,按业内公认的美国高速公路安全管理局(NHTSA)的分级,已经达到3级无人驾驶,即“在特定交通环境下实现自动驾驶,驾驶者能较长时间不参与控制”。再上一级,就是真正意义的无人驾驶,即驾驶员只需提供目的地,全程无须动手。
2016年4月份,2辆银色无人驾驶汽车启动后自动行驶出长安汽车工程研究总院大门,从重庆出发前往2000公里外的北京,这标志着我国首个长距离行驶的无人驾驶汽车超级测试正式启动。
在现场看到,工程师何博通过平板电脑发出启动指令后,无人驾驶汽车自动行驶,并完成自动避让行人、弯道加速、通过狭窄路段、自动跟车、自动超车和加速行驶等驾驶行为,均由无人驾驶汽车自行感应、识别、决策和执行,最后由何博发出停车指令。
此次超级测试的无人驾驶汽车是长安睿骋。国家“***”专家、长安汽车工程研究总院总工程师黎予生说,在绝大部分的路段,如高速路段、城市综合路段,汽车将完全依靠车辆自身所搭载的无人驾驶功能来实现,而在一些匝道或进站加油等部分,还是要依靠人工介入。据介绍,由于是长距离行驶,每一辆无人驾驶汽车上都坐有专业驾驶员,一旦出现问题,可以随时接管。
此次无人驾驶测试将由南到北,途经西安、郑州,预计于4月17日驶抵北京,最高时速将达自动驾驶领域一流水平,每小时120公里。测试汽车将实现停走型自适应巡航、自动沿着单车道进行自动驾驶、高速公路的交通拥堵辅助,还可在驾驶员提出请求或确认后主动更换车道,实现超车换道。
拥有七大核心功能的无人驾驶汽车,并不代表在2000公里的路程中可以畅通无阻。“这2000km,我们要克服国内道路状况不佳,恶劣交通环境等困难,这将是无人驾驶汽车面对实际复杂路况的又一挑战。”长安汽车工程研究总院常务副院长谭本宏如是说。
实际上,长安汽车在做这个测试之前,已经实现超过了2000公里的测试,在周边的高速公路上已经做了大量的测试。
市场呼唤新的无人驾驶汽车测试方法
现在已经有研究人员发现了一种新方法,可以加快无人驾驶汽车的测试进度。这种方法可以在很短的时间内完成多种无人驾驶汽车的测试任务,作为一种新方法,它并不是一次性的让无人驾驶汽车对所有情况进行全面的测试(通常无人驾驶汽车在测试过程中,绝大多数的公里数都没有太大意义),而是将各个不同的情况分解,而在模拟单元中反复进行测试。比如当你想要测试无人驾驶汽车对行人的反应,那么只需要不断循环行人和汽车之间的测试,而无需关注太多无用测试过程。
根据预估,这些改变将起到明显的效果。研究人员认为,在他们这种新方法的帮助下,1000英里的测试里程相当于实际测试30万到1亿英里的测试里程。因此这就相当于只用1天的时间,就可以完成Waymo从2016年到现在为止所有的63.5万英里测试。
当然,现在激动还有点高兴得太早。研究人员已经意识到,在这种测试准备好实际运用之前,需要有很多状况需要考虑。一辆无人驾驶汽车如何处理马路上的行人、超载的卡车以及被积雪覆盖的街道,都是需要考虑的情况。当然,我们并不能保证在每一辆车或者每一次测试中都能看到巨大的进步,但是如果真的这种测试方法被实际运用,那么很有可能对汽车行业产生巨大的影响。
虽然这种测试方法实际运用还需要等上几年或更长的时间,到时候无人驾驶汽车已经可以上路行驶。不过就算稍稍迟到,未来还可以用这种方法对无人驾驶汽车进行“查缺补漏”,解决一些历史遗留问题。
无人驾驶汽车测试方案的深入思考
本文是作者在TRC国际交通大会上的报告节选,探讨了无人车存在的一些问题及其测试方法。
1.为什么要进行无人车测试
首先考虑到的原因是避免事故。
最近关于特斯拉汽车自动模式导致的一起致命车祸将热衷于无人车的粉丝的激情迅速拉到冰点。
下图是CBS电视台给出的交警初步报告,直路飞速行驶的Tesla毫无减速拦腰撞到了一辆白色重卡的拖车,比头图
给出的示例还要惨烈,驾驶舱当时被削平,前进数十米后离开路面,撞击数个围栏,旋转后停下。驾驶员当场毙命
,只剩那个手持的播放器还稳健地播放着哈利波特。就像文章开头所说的,驾驶员溜号了,而传感器中的摄像头其
实看到了一个大白板而已,毫米波安装太低而超声检测距离太近,然后就有了Tesla官方博客所说的“Mobileye把卡
车当成了蓝天白云,毫米波把卡车当成了路牌,发生了严重事故,被NHTSA调查(可能会召回)。”
(图中红车是特斯拉,蓝车是大卡车)
那么Google无人车的情况是不是要好一些呢?好像情况也不太乐观。
以下是美国加州DMV公布的自2014年10月以来发生的15起无人车事故,其中12起是Google公司的无人车引起的。
最近一次发生在山景城,一辆Google无人车为了避免与前方障碍物发生相撞,变道时与后方的一辆公家车相撞。
Nissan May 10, 2016
Google April 28, 2016
Google April 7, 2016
Google February 14, 2016
Cruise Automation January 8, 2016
Google November 2, 2015
Google August 20, 2015
Google July 1, 2015
Google June 18, 2015
Google June 4, 2015
Google May 30, 2015
Google April 27, 2015
Google April 7, 2015
Google February 26, 2015
Delphi October 14, 2014
其次是保证极端条件下无人车传感器的可靠性。
我们知道无人车最重要的三种类型的传感器分别为:3D激光雷达,毫米波,视觉传感器。但是这些传感器在雨天、
雾天、冰雪天气或者夜间其性能将大打折扣,无法精确感知周围环境中的动态和静态物体,是无法保证车辆行驶安
全的。
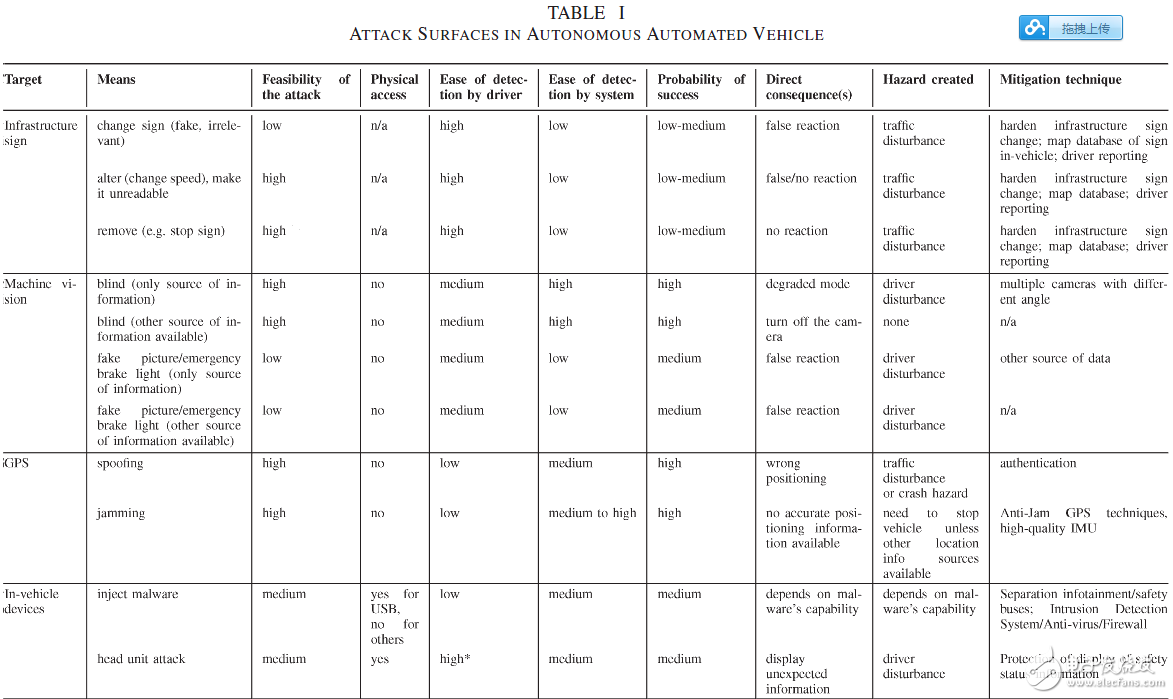
最后一个原因是防止骇客攻击将是无人车永远面临的课题。
Jonathan Petit, principal scientist at software security company Security Innovation, discovered that a laser
pointer could interfere with the laser ranging (Lidar) systems that most self-driving cars rely on to navigate.
The Lidar system creates a 3D map and allow the car to ‘see’ potential hazards by bouncing a laser beam
off obstacles.
Jonathan Petit认为一根激光笔就可以干扰无人车的激光测距系统。他和Path的Steven shladover博士分析了无
人车潜在的被攻击风险,列出了12种无人车可能被攻击的对象。


2.可以从现有传统的汽车测试经验中学到什么?
2.1现有的汽车室内台架测试是怎么做的?
传统的汽车室内检测是在室内台架上模拟道路行驶条件,让汽车的车轮行驶在自由滚筒上,通过反力制动方式
检测车辆的制动力,还可以模拟车辆的运行工况检测车辆的排放和油耗性能。在汽车室内检测设备中有两项伟
大的发明,一个是反力式制动实验台、另外一个是测功机。前者可以将汽车制动毂上的制动力转换为电机定子
与转子之间的扭力。后者可以将汽车发动机的输出功率转换为电涡流制动器输出的力矩和滚筒速度,实现W=F*V
的测量。这两项发明从60年代问世以来,在全世界各地应用推广,成为汽车检测的利器,也使得汽车检测由”眼观、
耳听、鼻嗅、手摸“式的人工测量变成高效科学的机器化测量。汽车室内检测大大缩短了过去必须在道路进行的道
路试验,实现了检测的流水化和自动化,提高了效率,保证了汽车的安全性能。
2.2 现有的无人车竞赛是如何进行无人车测试的?
无人车竞赛是世界各国进行无人车威廉希尔官方网站 测试的一种重要手段,比较知名的无人竞赛有:美国国防部高级研究计
划局(DARPA)举办的“GRAND Challenge”比赛,德国军方组织欧洲陆地机器人竞赛和中国国家自然基金委组织的“未
来挑战”无人驾驶车比赛。无人车竞赛主要是通过设置一些程序化的比赛项目和比赛路线,让无人车自主完成过交叉
口,避撞行人,超车,指定位置停车,过立交桥等任务,记分规则为将不同项目计不同的分值,完成任务则得分,
失败不得分甚至扣分,然后除以总时间,以此进行排序。这些任务涉及到了环境感知,路径规划,高精度定位,自
主决策等多层次的任务。无人车竞赛这种方式促进了参赛方不断地进行威廉希尔官方网站 积累,超越自我,同时也提供了一个同
台献技、交流合作的平台,同时还是一个无人车人才培养的平台,随着无人车竞赛的难度不断加大,无人车新威廉希尔官方网站
也不断涌现,让无人车朝着商用化的目标一步步迈进。
2.3无人车道路试验
在无人车实验中,Google公司最热衷于道路试验,因为道路试验最真实,最可靠,遇到的一切场景将是无人车未来
必须面临的场景。因此Google公司进行了约170万英里的无人驾驶道路试验,在各种道路上进行测试,包括高速公路,
城市拥挤道路,旧金山的九曲十八弯,沙漠道路,大学校园,可以说能想象到的道路都进行了测试,目前Google公司
统计的无人车事故率为每10万英里0.6起,已经非常接近人类的记录,即每10万英里0.3起。
2.4 兰德公司对无人车的质疑
美国兰德公司是一家全球知名的顾问公司,经常给美国国会提供全球各国军事实力对比报告。这一次兰德公司针对无人、车的应用前景也发布了一份将近300页的白皮书。在该白皮书中提出了三个问题:
1)How many miles would autonomous vehicles have to be driven without failure to demonstrate that their
failure rate is below some benchmark?This provides a lower bound on the miles that are needed.However,
autonomous vehicles will not be perfect and failureswill occur.(无人车至少要无故障地行驶多少公里才能证明
其事故率低于某个指标,这只是提供了一个下界,并不能说明无人车100%精确或者故障不会发生)
2)How many miles would autonomous vehicles have to be driven to demonstrate their failure rate to a
particular degree of precision?
(无人车至少要无故障地行驶多少公里才能证明其事故率的精度是可信的,比如:10万英里的事故率是0.3,那么第二
个10万英里会不会还是0.3?第100个呢?)
3)How many miles would autonomous vehicles have to be driven to demonstrate that their failure rate is
statisticallysignificantly lower than the human driver failure rate?(无人车至少要无故障地行驶多少公里才能证明
其在统计意义上是比人工驾驶安全的呢?)
兰德公司通过简单的统计分析进行了估算,结论如下:
该报告指出:1)达到1.09死亡人数/1亿英里的事故率,需要测试12.5年(365天40mile的速度无间断测量);2)事故率精度达到95%,上下20%方差,需要测试400年;3)以95%的概率,第二类假设80%可能性的前提下,无人车的性能超过人工驾驶性能的20%,需要测试500年。
兰德公司指出:道路试验无法测试出无人车的潜在危险,必须进行方法上的创新,从无人车各个部件和软件的源头设计测试规则,才能保证无人车这项威廉希尔官方网站 ,可以为人类造福,才能管控无人车不但演变过程中存在的风险。
3.关于无人车测试方法的设想
3.1一种多层次的无人车测试框架
在现有的测试基础上,我们提出了一种多层次的无人车测试框架,将无人车的测试分为5个层次,分别为:1、元功能测试;2、封闭环境中极端条件下测试;3、基于虚拟现实和硬件在换仿真测试;4、随机道路抽取测试;5、用户培训和应用技能测试
3.2元功能测试
元功能是指无人车的功能分解后,不能再进行分解的功能。包括无人车的定位功能,环境识别功能,动作执行功能,
速度控制公路,路径规划,综合决策功能等,任何一项功能判断其是否为元功能,则首先判断其是否能被分解。
3.3封闭环境中极端条件下测试
极端条件下测试是对无人车各项综合功能的极限测试,是测试95%常态以外很少出现,但是又是致命的极端条件下的测试,包括各种恶劣天气,恶劣光线条件、恶意交通行为干扰等等,这类测试是保证无人车可靠性能的关键。
3.4基于虚拟现实和硬件在环仿真测试
道路试验虽然可以测试无人车在商用环境中的性能,但是其费时、费力,而且并不能穷举所有的道路环境情况和交通事件。如果采用虚拟现实威廉希尔官方网站 将道路环境和交通事件录制在数据库中,采用回放的方式输入到无人车的传感器接口中,通过判断无人车在不同道路环境条件下的动作执行正确率来评估无人车的智能将是一件非常有趣的事情。同时,利用该项威廉希尔官方网站 可以在无人车机器人与老司机之间展开一场人机大战,将一种综合的,不可以定量化的比赛搬到室内。更可怕的事实是这辆无人车将偷师老司机,通过深度学习来训练自己。还有一个优点是,该方法可以进行测试环境的语义压缩,在道路试验中,80%的道路是平坦的,笔直的,10%是有惊无险的,只有10%是挑战无人车智能的,在虚拟的测试环境中,是可以对这20%的环境和条件进行压缩出现的,因此其挑战性更大。好比天上一日,地下一年。
3.5随机道路抽取测试
在完成基于VR的测试后,还要防止“秀才纸上谈兵,光说不练”的尴尬,是骡子是马,需要出来遛一遛。通过前期的测试结果,设计一定算法,抽取一定的实际道路样本对无人车弱项进行测试,这样才能保证其“实践能力”。
3.6用户培训和应用技能测试
在完成无人车自身测试的基础上,还需要进行无人车用户的专门培训和测试,这样才能保证用户在紧急事件发生的情况下从容应对。
4.已完成的工作
4.1网联汽车与无人车综合测试试验场
在长安大学赵祥模教授的带领下,本课题组已完成了全国高校唯一的人车路环境综合测试场的电子化、智能化改造用于网联汽车和无人车的测试。整个试验场具有以下5个特点:
1) 5种无线网络(4G-LTE、LTE-V,Wi-Fi,DSRC,EUHT)的全覆盖;
2) 自建地面高精度定位基站,定位精度30cm,可实现全试验场无死区全覆盖;
3) 建设有便利的交通设施(龙门架、相机、检测线圈、交叉口信号控制系统、交通标志、光纤网络);
4) 多种不同形式的路面(0.1-0.9不同附着系数路面)和道路形式(高速环道、入口并线、交叉口);
5) 全部电子化的设施管理。
4.2网联汽车与无人车开发
开发了3辆无人车,2辆全自动无人汽车。
长安大学赵祥模教授课题组开发的无人车畅游长大校园!http://v.youku.com/v_show/id_XMTY0NDI3MjQ0OA==.html
5.结论



























 工商网监
工商网监
评论