 电子发烧友App
电子发烧友App


什么是串口通信
串口通信,就是传数据只有一根线传输,一次只能传一个位,要传一个字节就需要传8次。串口通信就是把数据串在一根线上传输,所以就叫串口吧。
在对速率要求不高的情况,使用一根线发送数据是带来大大的方便和实用价值的。
为了能正常发送和接收正确的数据,那异步串口通信就需要如下图的格式。
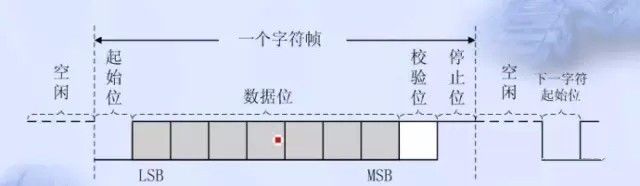
在串口的通信参数上,就有了波特率、起始位、数据位、校验位、停止位这几个参数。
串口通信主要为分232,485,422三种通信方式,这三种有什么区别呢?
232
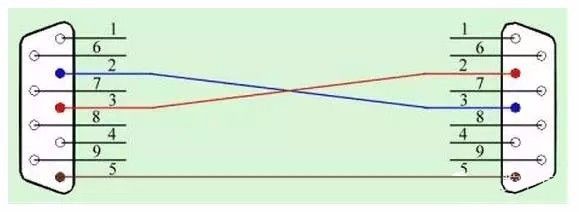
232通信主要是由RX、TX、GND三根线组成。STM32串口通信相关实例:按下按键,通过串口发送数据实例。
RX接TX,TX接RX,GND接GND。这里发送和接收分别是由不同的线处理的,也就是能同时发送数据和接收数据,这就是所谓的全双工通信。
在这里扩展一下,串口通信还有一个功能叫做全功能串口通信,也叫标准串口。因为在两个设备间进行数据传输,有些设备处理速度比较快,有些数据比较慢。为了保证数据能正常传输,在RX、TX的基础上,还增加了几个控制引脚,最后成了9个引脚,也就是常见的DB9这个东西,如下图所示。
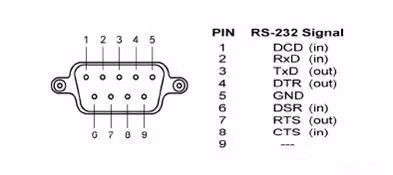
但是,如今很多控制器、人机界面、PLC等使用串口通信中一般不使用标准串口,而是直接使用RX、TX、GND三根线来通信的。
485
485的出现,是为了解决232通信距离受限的问题。
485通信只需要+、-两根线,或者也叫A、B两根线。A,B两根线的差分电平信号就是作为数据信号传输。由于发送与接收都是用这两根线,也就是说每次只能用作发送或者只能用作接收。所以,485是半双工通信。
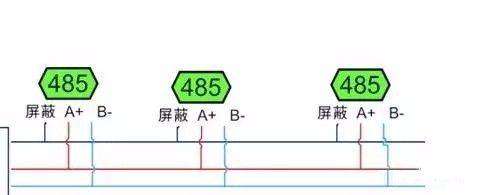
485就是这样牺牲了232全双工的效率来达到自己传输距离远的代价。
422
422的出现,是为了既实现232的全双工通信方式,又能像485这样提高传输距离。422也常被标注为485-4,而485被标注为485-2。因为485-2是2根线,485-4是4根线,下图是422的示意图。
422就是把232的RX分成两根线,RX+,RX-,把TX分成TX+,TX-。这样就可以同时发送和同时接收了,还可以像485这样,有较远的传输距离。可是这样一种很有优势的通信方式,却用的不多,最常用到的是232跟485。
串口通信常见问题
电脑使用USB转串口可以和设备通信上,换成屏与设备就通信不上了
1)有可能电脑USB转串口接到设备上,使用的是标准串口功能,也就是除了RX,TX,GDN外,还使用了其它引脚。比如像欧姆龙PLC,三菱PLC,在实际与屏的通信中,就需要接某些引脚短接的情况。
2)电脑与控制器或PLC通信时,是扫描波特率参数,自适应的,屏通信可能参数没有设备好。在三菱,基恩士等PLC,就存在变化波特率进行通信交互的过程。
3)也有可能是接线方式不对。因为有些DB9,还需要公头,母头。如果不注意的话,也会存在把TX接到TX上,把RX接到RX上,这样需要注意的地方。
4) 在这里补充一下,有时候可能会使用一些串口助手发送测试数据与控制器通信,有些串口助手的奇偶校验是不起作用,这个要提醒一下。
这A家的屏可以和设备通信,换成B家的屏就通信不上了
1) 首先确认一下接线是否正确了,RX和TX是否兼容。
2) 地线是否没有接。
3) 除了RX,TX,GND,是否还有其它引脚需要短接的。
4) 通信协议是否一致或不完善,波特率是否一样。
以前不接地线可以通信,换个设备为什么需要接地线了
这个问题和上一个类似,因为有些设备使用了隔离电源。以前不接地可以通信,有可能实际上地线已经接了,所以才可以通信。可能换了个带隔离电源的,两个设备的地是隔离的,就需要在串口上把地线接起来。这个我是自身经历过的,有个客户老说他的设备通信不上,后来拍个照我给我,他地线没有接,他说以前不接地线可以通信的。于是我就给他科普了一下。
一个设备是232,另一个设备是422,没有转换设备,怎么办
这个情况我遇到过,客户的设备是422通信的,但是我手上并没有422设备,只有232通信可以测试。因此就需要把422转成232进行通信。
刚才也讲了422和232的接线,因为这两个都是全双工的,接收和发送都是分到的,而422只是以一种差分信号进行传输。
把422的Rx+与232的TX接,422的RX-与232的GND接。
把422的TX+与232的RX接,422的TX-与232的GDN接。
这样,422设备要发送数据的,就可以发送到了232的RX上。232的TX发数据后,由于TX和GND也形成了差分信号给422,422就可以接收到数据了。
用232通信没问题,用485通信没问题,使用232转485之后就通信不稳定
232和485从通信原理上,最大一个差别是全双工和半双工的区别。可是应用层发送数据和接收数据才不管底下是全双工还是半双工。
但是485就得管了。因为既然是半双工,就得严格保证通路上只能有发送或只能有接收的数据,一旦同时有发送和接收,数据就会冲突了。所以解决的办法就是主站设备,也就是主动命令的一方就需要严格控制好发送数据命令的节奏了。当然有些232转485的设备做的比较好了,可以优化这个,但是主站还是要控制,比较把通信速率调节慢一些。
要想实现两个屏或两个主站通过485访问modbus设备,有什么好的办法
在485通信中,基本上是一主多从。但是遇到一些客户实际使用中,有客户想用两个屏来访问一个modbus设备的。目前暂时还没有好的办法。等这个功能出来后,再来给大家演示操作吧。
串口通信的弱点
1)信号干扰的问题
建议使用带屏蔽线,接线要严格,比如要接地。有些485通信上,还考虑接上终端电阻来匹配。如果是232,尽量不要让线太长。通信协议上尽量避免长报文的数据通信。
2)波特率匹配的问题
因为有些设备的计算的波特率是存在误差的,特别是一些控制器,由于使用的晶振不一样。因此在一些波特率比如9600波特率就存在误差。存在误差带来的影响是什么呢。因为接收方是通过时间来计算一个位的。那么如果一个报文过长,就会存在误差积累的问题,算着算着就偏了。所以,这也是串口通信不稳定的一些地方,在使用上应注意避免发送太长数据的包。
3)在一些可能会存在干扰的情况,可以考虑使用奇校验或者偶校验
因为虽说出现错误的可能性不大,但既然存在干扰,如果加了校验,至少可以把错误的报文过滤掉。总好比没有校验然后通信数据错了不知道。或者尽量使用一些带校验的协议,防止数据出错。
4) 串口通信本来就比较慢,请降低对数据响应的要求
因为串口通信本身就比以太网慢。而且,串口通信并不是能像CPU那样多线程处理。因为就一个口一个线数据出去,即便你应用到程序再怎么用多线程处理数据,但是最底下也只有一个口出去,一次也只能传一个位,一个字节过去。因为有客户在使用9600的波特率通信,但是又希望多少的数据可以在多少毫秒内得到响应。
但是串口通信还是要事实求是,所以正确认识串口通信对应用,对开发,对沟通都有着很大的帮助的。
为什么不用同步通信
刚才提到,同步通信需要依赖于时钟信号。这就存在一个问题,这个时钟信号是谁来发起呢。在同步通信中,往往需要一个主设备发起时钟信号读从模块的数据。在实际中,有屏读PLC,有屏读屏的数据。而单纯地从异步串口通信来说,是没有主从之说,双方都是平等的角色,都可以互发信息,互收信息。而同步通信一般是应用于CPU读一些模块,由CPU发起时钟信号,比如读SD卡模块,就可以通过SPI方式,还有一些传感器模块。
审核编辑:汤梓红










 工商网监
工商网监
评论