完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 循迹小车

做单片机的工程师相比都堆循迹小车有所认识,它是自动引导机器人系统的基本应用,那么今天小编就给大家介绍下自动自动循迹小车的原理,智能循迹小车的应用,智能循迹小车程序,循迹小车用途等知识吧!
一款自动循迹小车的设计方案 自动循迹小车是比较热门地电子竞赛,有许多设计方案。做单片机的工程师相比都堆循迹小车有所认识,它是自动引导机器人系统的基本应用,那么今天小编就给大家介绍下自动自动循迹小车的原理,智能循迹小车的应用,智能循迹小车程序,循迹小车用途等知识吧!
做单片机的工程师相比都堆循迹小车有所认识,它是自动引导机器人系统的基本应用,那么今天小编就给大家介绍下自动自动循迹小车的原理,智能循迹小车的应用,智能循迹小车程序,循迹小车用途等知识吧!
自动循迹小车的原理
1.小车控制及驱动单元的选择
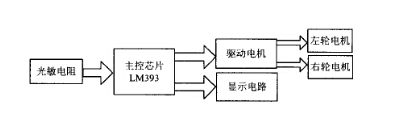
此部分是整个小车的大脑,是整个小车运行的核心部件,起着控制小车所有运行状态的作用。通常选用单片机作为小车的核心控制单元,本文以台湾凌阳公司的 SPCE061A单片机为例予以介绍。SPCE061是一款拥有2K RAM、32KFlash、32 个I/O 口,并集成了AD/DA功能强大的16位微处理器,它还拥有丰富的语音处理功能,为小车的功能扩展提供了相当大的空间。只要按照该单片机的要求对其编制程 序就可以实现很多不同的功能。
小车驱动电机一般利用现成的玩具小车上的配套直流电机。考虑到小车必须能够前进、倒退、停止,并能灵活转向,在左右两轮各装一个电机分别进行驱动。当左轮 电机转速高于右轮电机转速时小车向右转,反之则向左转。为了能控制车轮的转速,可以采取PWM调速法,即由单片机的IOB8、IOB9输出一系列频率固定 的方波,再通过功率放大来驱动电机,在单片机中编程改变输出方波的占空比就可以改变加到电机上的平均电压,从而可以改变电机的转速。左右轮两个电机转速的 配合就可以实现小车的前进、倒退、转弯等功能。
2.小车循迹的原理
这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反 射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。单片机就是否收到反射回来的红外光为依据来确定黑线的 位置和小车的行走路线。红外探测器探测距离有限,一般最大不应超过15cm。对于发射和接收红外线的红外探头,可以自己制作或直接采用集成式红外探头。
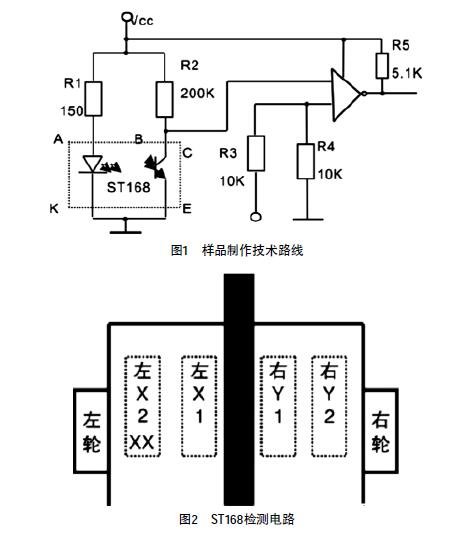
(1)自制红外探头电路如图1所示,红外光的发送接收选用型号为ST168的对管。当小车在白色地面行驶时,装在车下的红外发射管发射红外线信号, 经白色反射后,被接收管接收,一旦接收管接收到信号,那么图中光敏三极管将导通,比较器输出为低电平;当小车行驶到黑色引导线时,红外线信号被黑色吸收 后,光敏三极管截止,比较器输出高电平,从而实现了通过红外线检测信号的功能。将检测到的信号送到单片机I/O口,当I/O口检测到的信号为高电平时,表 明红外光被地上的黑色引导线吸收了,表明小车处在黑色的引导线上;同理,当I/O口检测到的信号为低电平时,表明小车行驶在白色地面上。此种方法简单,价 格便宜,灵敏度可调,但是容易受到周围环境的影响,特别是在图1较强的日光灯下,对检测到的信号有一定的影响。

(2)集成式红外探头可以采用型号为E3F-DS10C4集成断续式光电开关探测器,它具有简单、可靠的工作性能,只要调节探头上的一个旋钮就可以 控制探头的灵敏度。该探头输出端只有三根线(电源线、地线、信号线),只要将信号线接在单片机的I/O口,然后不停地对该I/O口进行扫描检测,当其为高 电平时则检测到白纸,当为低电平时则检测到黑线。此种探头还能有效地防止普通光源(如日光灯等)的干扰。其缺点则是体积比较大,占用了小车有限的空间。
3.红外探头的安装
在小车具体的循迹行走过程中,为了能精确测定黑线位置并确定小车行走的方向,需要同时在底盘装设4个红外探测头,进行两级方向纠正控制,提高其循迹的可靠 性。这4个红外探头的具体位置如图2所示。图中循迹传感器共安装4个,全部在一条直线上。其中InfraredMR与InfraredML 为第一级方向控制传感器,InfraredSR 与InfraredSL 为第二级方向控制传感器。小车行走时,始终保持黑线(如图2 中所示的行走轨迹黑线)在InfraredMR和InfraredML这两个第一级传感器之间,当小车偏离黑线时,第一级探测器一旦探测到有黑线,单片机 就会按照预先编定的程序发送指令给小车的控 制系统,控制系统再对小车路径予以纠正。若小车回到了轨道上,即4个探测器都只检测到白纸,则小车会继续行走;若小车由于惯性过大依旧偏离轨道,越出了第 一级两个探测器的探测范围,这时第二级动作,再次对小车的运动进行纠正,使之回到正确轨道上去。可以看出,第二级方向探测器实际是第一级的后备保护,从而 提高了小车循迹的可靠性。

4.软件控制
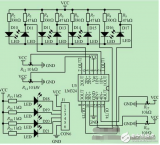
其程序控制框图如图3。小车进入循迹模式后,即开始不停地扫描与探测器连接的单片机I/O口,一旦检测到某个I/O口有信号,即进入判断处理程序 (switch),先确定4个探测器中的哪一个探测到了黑线,如果InfraredML(左面第一级传感器)或者InfraredSL(左面第二级传感 器)探测到黑线,即小车左半部分压到黑线,车身向右偏出,此时应使小车向左转;如果是InfraredMR(右面第一级传感 器)或InfraredSR(右面第二级传感器)探测到了黑线,即车身右半部压住黑线,小车向左偏出了轨迹,则应使小车向右转。在经过了方向调整后,小车 再继续向前行走,并继续探测黑线重复上述动作。

由于第二级方向控制为第一级的后备,则两个等级间的转向力度必须相互配合。第二级通常是在超出第一级的控制范围的情况下发生作用,它也是最后一层保护,所 以它必须要保证小车回到正确轨迹上来,则通常使第二级转向力度大于第一级,即level2》level1(level1、level2为小车转向力 度,其大小通过改变单片机输出的占空比的大小来改变),具体数值在实地实验中得到。
专家点评:根据本文所讲述的方法,我们可以较容易地做出按照一定轨迹行走的智能电动小车。但是按照该方法行走的小车如果是走直线,有可能会是蛇形前进。为 了使小车能够按轨迹行走的更流畅,可以在软件编程时运用一些简单的算法。例如,在对小车进行纠偏时,适当提前停止纠偏,而不要等到小车完全不偏时再停止, 以防止小车的过冲。
51单片机寻迹小车完整程序
今天终于把小车调成功了耶!!!
费了好大劲去调PWM波把速度降下来,然后写转弯,左转大湾,左转小湾,右转大湾,右转小湾,四个红外收发管,所以就写了四个转弯的状态。
P1是用来控制电机的端口,IN~控制前进后退,EN~控制小车能不能走,P0是红外接收的口,为1时表示探测到黑线
zkb为占空比,通过zkb来控制小车的速度,t为相当于总时间,zkb是在t时间内电机工作的时间。
下面是我写的程序:
#include 《reg52.h》
sbit IN1 = P1^0;
sbit IN2 = P1^1;
sbit ENA = P1^2;
sbit IN3 = P1^3;
sbit IN4 = P1^4;
sbit ENB = P1^5;
sbit left1 = P0^0;
sbit left2 = P0^1;
sbit right1 = P0^2;
sbit right2 = P0^3;
unsigned char zkb1 = 0;
unsigned char zkb2 = 0;
unsigned char t = 0;
void init()
{
EA = 1;
TMOD |= 0x01;
TH0 =(65536 - 100) / 256;
TL0 = (65536 - 100)% 256;
ET0 = 1;
TR0 = 1;
}
void timer0() interrupt 1
{
TH0 = (65536 - 100) / 256;
TL0 = (65536 - 100) % 256;
if(t 《 zkb1)
{
// if(t % 2 == 0)
// {
// ENA = 1;
// }
// else
// {
// ENA = 0;
// }
ENA = 1;
}
else
{
ENA = 0;
}
if(t 《 zkb2)
{
// if(t%2 == 0)
// {
// ENB = 1;
// }
// else
// {
// ENB = 0;
// }
ENB =1;
}
else
{
ENB = 0;
}
++t;
if(t 》= 50)
{
t = 0;
}
}
void turn_left1()
{
zkb1 = 13;
zkb2 = 0;
}
void turn_left2()
{
zkb1 = 13;
zkb2 = 0;
}
void turn_right1()
{
zkb1 = 0;
zkb2 = 13;
}
void turn_right2()
{
zkb1 = 0;
zkb2 = 13;
}
void qianjin()
{
zkb1 = 8;
zkb2 = 8;
}
void xunji()
{
unsigned char flag;
if((right2 == 0)&&(right1 == 0)&&(left1 == 0)&&(left2 == 0))
{
flag = 0;
}
if((right2 == 0)&&(right1 ==1)&&(left1 == 0)&&(left2 == 0))
{
flag = 1;
}
if((right2 == 0)&&(right1 == 0)&&(left1 == 1)&&(left2 == 0))
{
flag = 2;
}
if((right2 == 0)&&(right1 == 0)&&(left1 == 0)&&(left2 == 1))
{
flag = 3;
}
if((right2 == 1)&&(right1 == 0)&&(left1 == 0)&&(left2 == 0))
{
flag = 4;
}
switch(flag)
{
case 0:qianjin();break;
case 1:turn_right1();break;
case 2:turn_left1();break;
case 3:turn_left2();break;
case 4:turn_right2();break;
default:qianjin();break;
}
}
void main()
{
init();
// zkb1 = 40;
// zkb2 = 30;
IN1 = 0;
IN2 = 1;
IN3 = 0;
IN4 = 1;
while(1)
{
xunji();
}
}


CW32循迹小车.zip_免费高速下载|百度网盘-分享无限制 一、概述 CW32循迹、遥控小车具有循迹和遥控两种功能,小车的硬件模块由CW32F030...
循迹小车是这种能够顺着预置的运动轨迹线路行车的小车,在很多实验教学场所均有运用。而在循迹小车行车的全过程中,怎么让小轿车可以精确地顺着运动轨迹路线行车而...
无线供电威廉希尔官方网站 随着气候变化、能源枯竭和环境保护的日趋严峻而不断发展,而电磁所具有的功率大、输电效率高的特点,各高校和研究机构先后投入该领域的研究和应用。
以LDC1000电感/数字转换器为核心,设计并制作了一个可自动根据铁丝形状循迹小车。系统的主要功能模块包括:主控模块、金属信号探测模块、速度检测模块,电...
基于 STC12C5A60S2 的智能循迹小车(附传感器电机驱动电路图)
设计了一种智能循迹小车,介绍了系统总体,STC12C5A60S2 单片机为智能小车控制核心、电源模块、电机驱动电路、循迹传感器模块及相应软件设计方案。...
2017-04-19 标签:传感器循迹小车stc12c5a60s2 1.1万 0
学生通过动手实践能大大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车、救火机器人、足球机器人、避障机器...
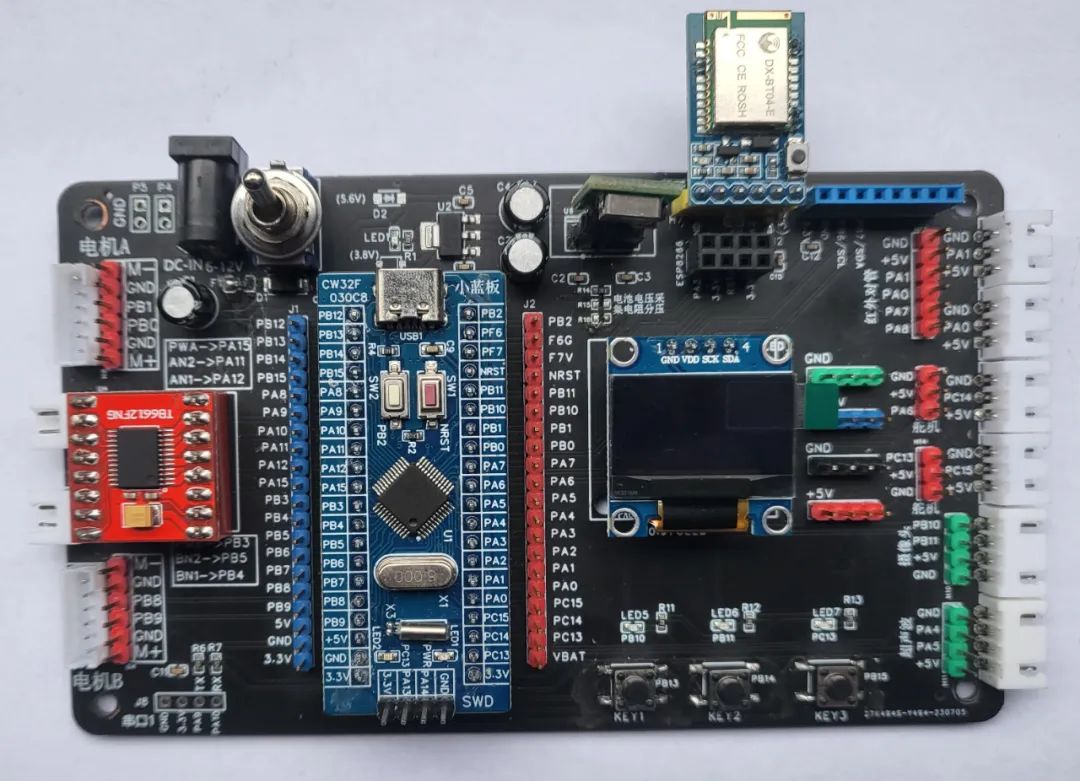
本实验是使用CW32单片机制作一个入门的遥控循迹小车。遥控采用蓝牙配合手机APP进行遥控。循迹使用一个5路的循迹模块。使用OLED模块进行显示当前小车状态。
 换一批
换一批
编辑推荐厂商产品威廉希尔官方网站 软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民威廉希尔官方网站 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济威廉希尔官方网站 开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1

