 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
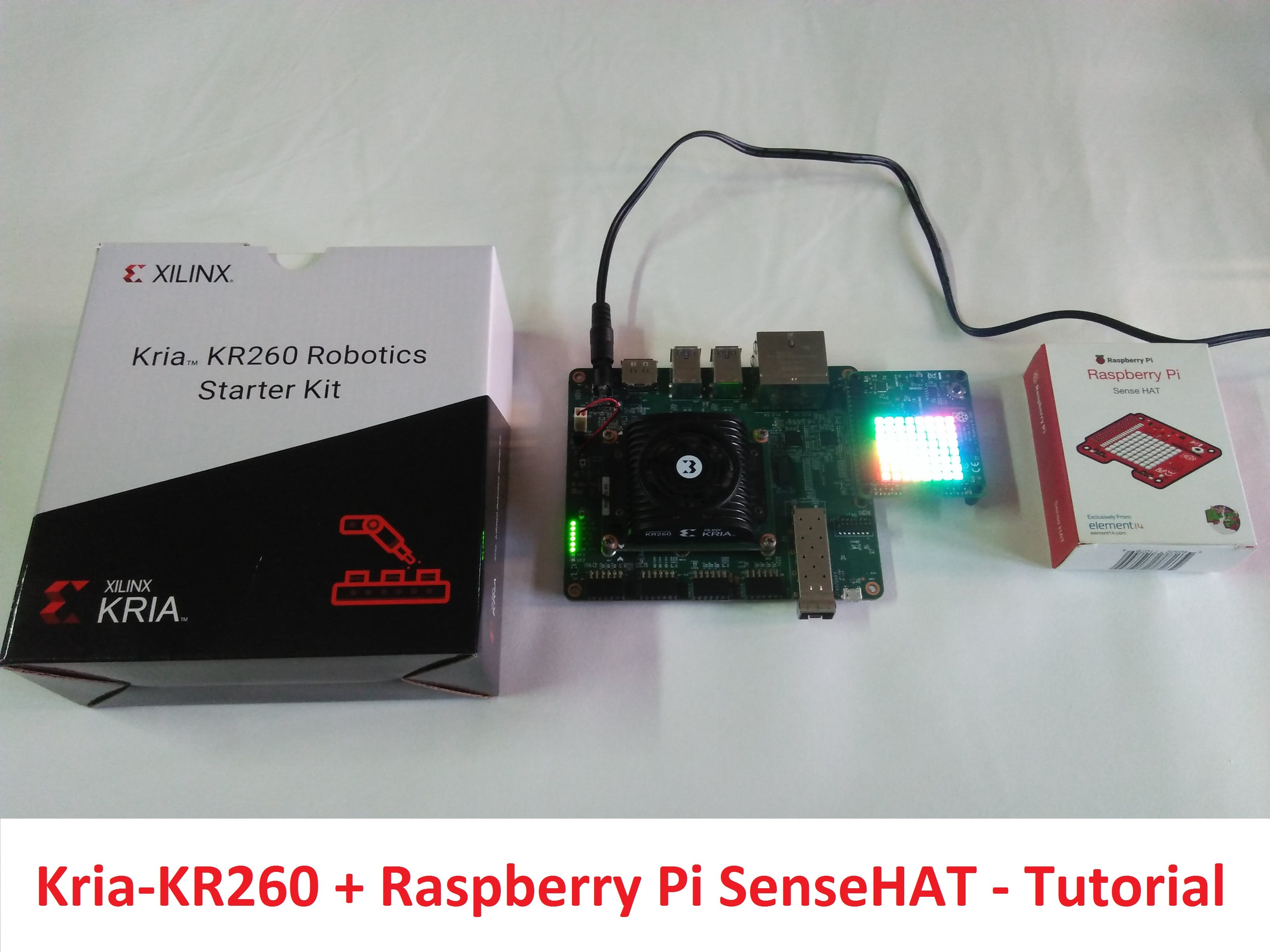
本教程是关于“Rpi SenseHAT 与 AMD-Xilinx Kria KR260 和 Petalinux 的接口”。
本教程中使用的工具有:
- 维瓦多 2022.2
- 花瓣 2022.2
Rpi-SenseHAT 的 VIVADO/Petalinux 项目源码、BSP、Kria 固件可在 Github 获取:https://github.com/LogicTronix/KR260-SenseHAT-Petalinux [ Git Branch: SenseHAT-Sensors ]
树莓派感知帽子
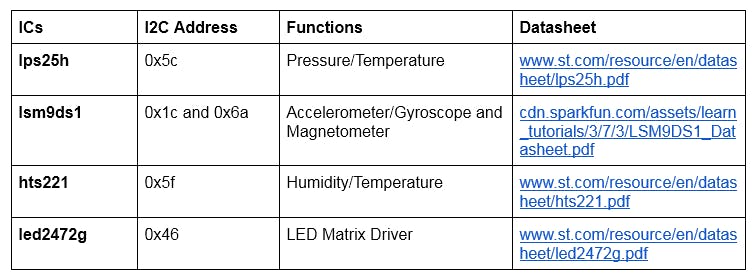
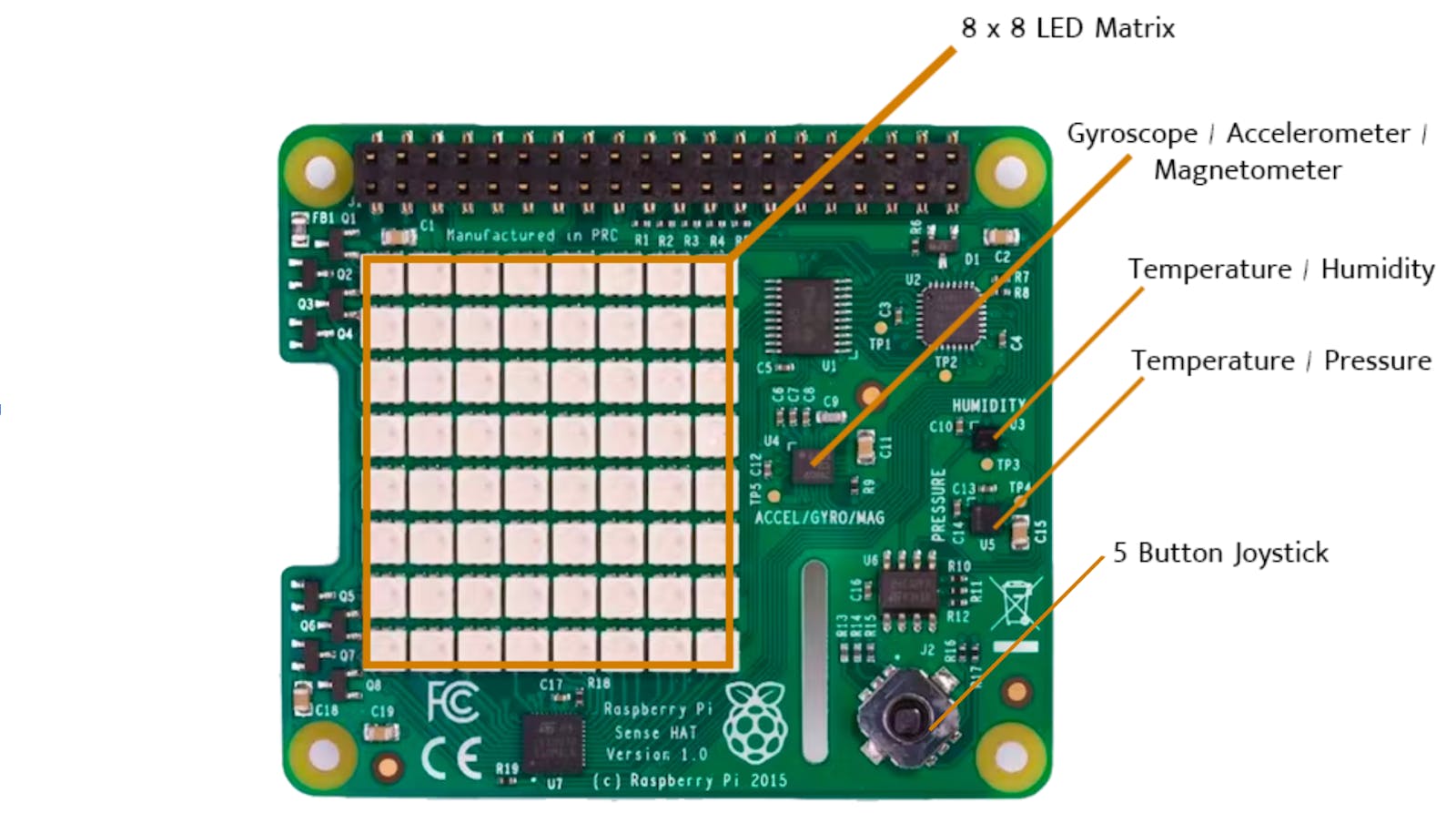
Raspberry Pi Sense HAT是一个附加板,可提供一系列传感功能。机载传感器使我们能够监控压力、湿度、温度、颜色、方向和运动。8x8 RGB LED 矩阵让我们能够可视化来自传感器的数据,五键操纵杆可以充当输入设备。
板上的所有传感器都连接到单个 I2C 总线。所有的传感器都充当从机,并使用 I2C 协议与主机进行通信。
Sense Hat 上使用的 IC:
Vivado 设计流程
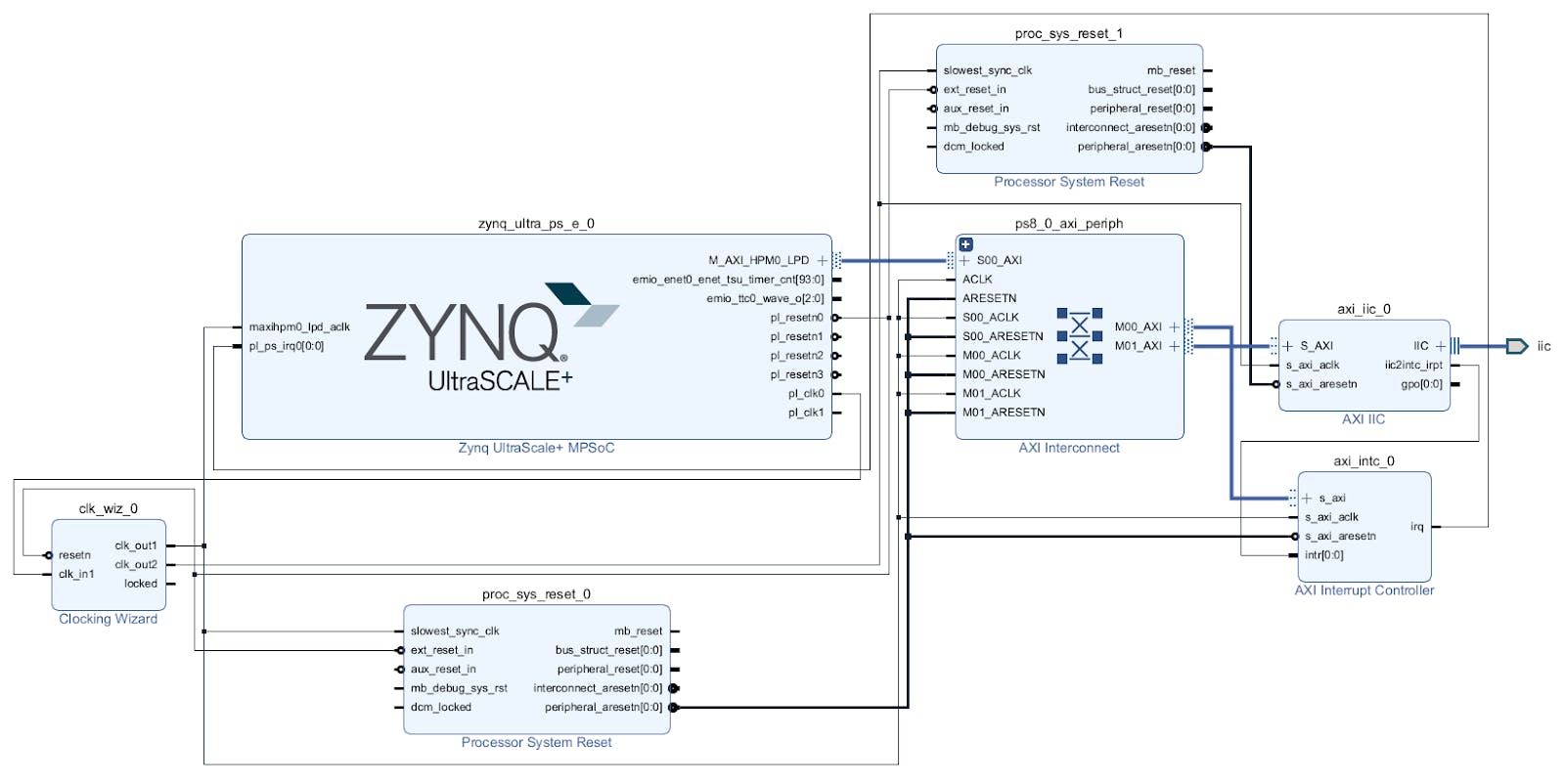
设计中使用的 IP
以下是 Vivado 设计中使用的 IP 内核,用于创建在 Kria KR260 上运行的“Sense HAT-I2C 接口”。
Zynq® Ultrascale+™ MPSoC
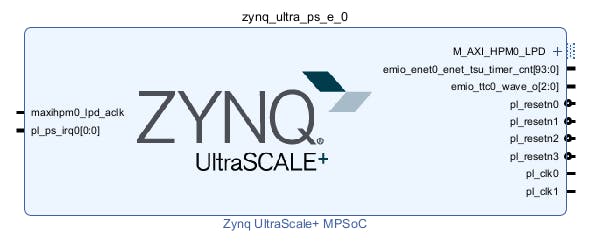
Zynq® Ultrascale+™ MPSoC 充当 PS 和 PL 之间的逻辑连接,同时协助使用 Vivado® IP 集成器将定制和嵌入式 IP 与处理系统集成。
AXI 中断控制器
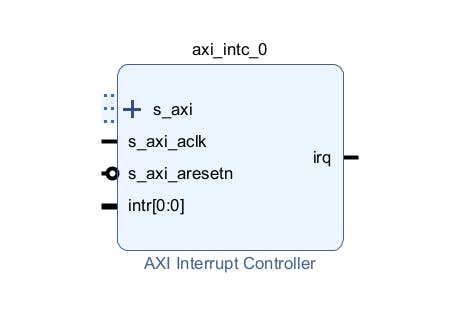
AXI 中断控制器 (AXI INTC) 内核将来自外围设备的多个中断输入集中到系统处理器的单个中断输出。
时钟向导
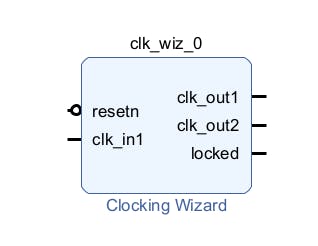
Clocking Wizard IP 简化了为根据用户时钟要求定制的时钟电路创建 HDL 源代码包装器的过程。该向导指导用户为您的时钟原语设置适当的属性,并允许覆盖任何向导计算的参数。
AXI IIC 总线接口
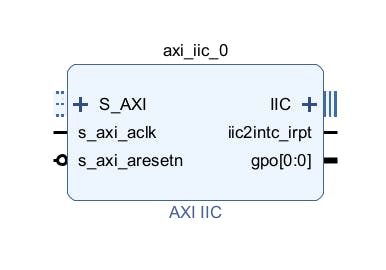
AXI IIC 总线接口连接到 AMBA® AXI 规范,并为大量流行设备提供低速、双线、串行总线接口。本产品规范定义了 AXI IIC 总线接口模块的架构、硬件(信号)接口、软件(寄存器)接口和参数化选项。
处理系统重置
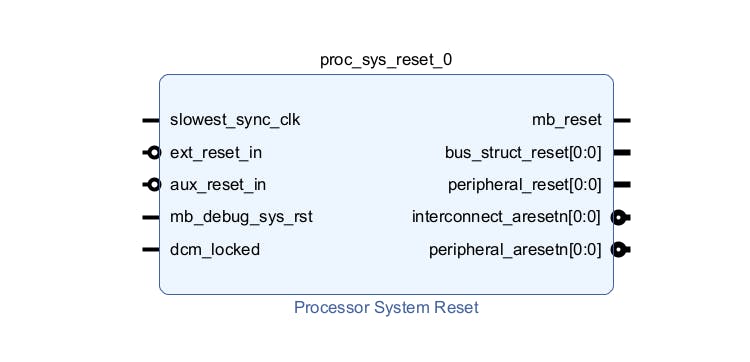
处理系统复位是一个软 IP,它提供了一种机制来处理给定系统的复位条件。内核在输入端处理多种复位条件,并在输出端生成适当的复位。该内核根据外部或内部复位条件生成复位。
AXI互连
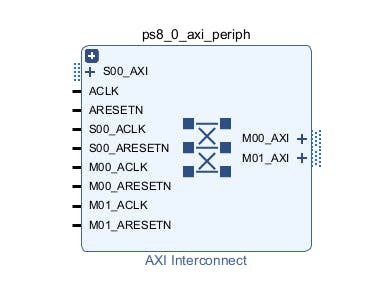
AXI 互连 IP 将一个或多个 AXI 内存映射主设备连接到一个或多个内存映射从设备。AXI 互连内核允许 AXI 主设备和从设备的任意组合连接到它,这些设备在数据宽度、时钟域和 AXI 子协议(AXI4、AXI3 或 AXI4-Lite)方面可能各不相同。
块设计-完整的块设计
Sense HAT - KR260 接头对齐
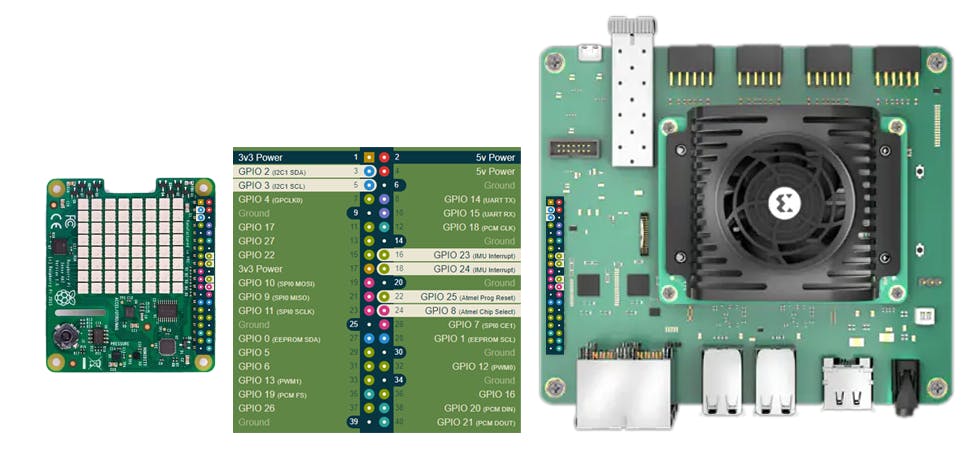
如上图所示,Sense HAT 位于 KR260 上的 RPi 接头上方。此对齐显示了 40 个引脚的描述。传感器通过使用引脚 3 和 5 的 I2C 进行通信。
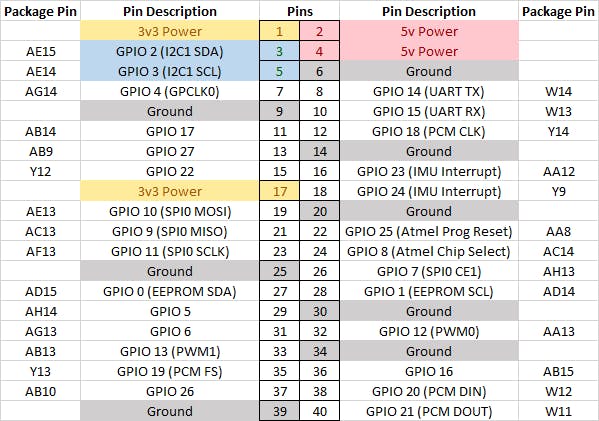
约束
KR260 上只有 2 个引脚(AE14 和 AE15)需要约束 I2C 才能工作。AE15 用于 SDA,AE14 用于 SCL。
set_property PACKAGE_PIN AE15 [get_ports {iic_sda_io}]
set_property IOSTANDARD LVCMOS33 [get_ports {iic_sda_io}]
set_property PULLUP true [get_ports {iic_sda_io}]
set_property PACKAGE_PIN AE14 [get_ports {iic_scl_io}]
set_property IOSTANDARD LVCMOS33 [get_ports {iic_scl_io}]
set_property PULLUP true [get_ports {iic_scl_io}]
但是,下图可用作映射和约束所有其他引脚的参考。
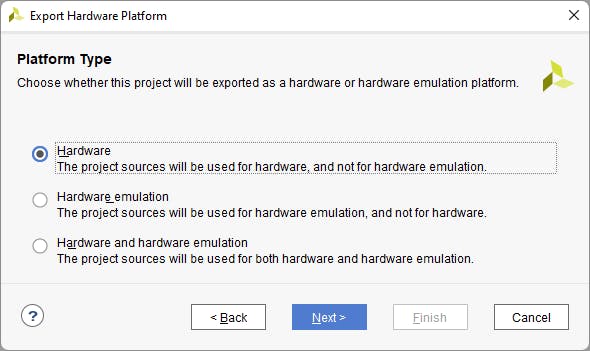
生成 XSA
- 从“文件”菜单中,选择“导出”>“导出平台”。
- 在平台类型窗口中选择硬件选项。
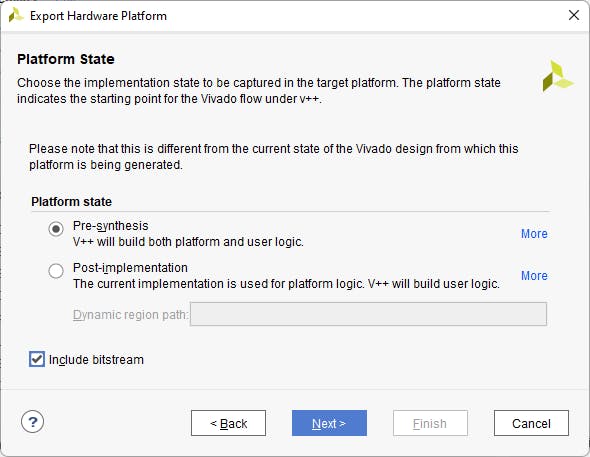
- 选择 Pre-Synthesis 状态,并在 Platform State 窗口中选择 Include bitstream 选项。
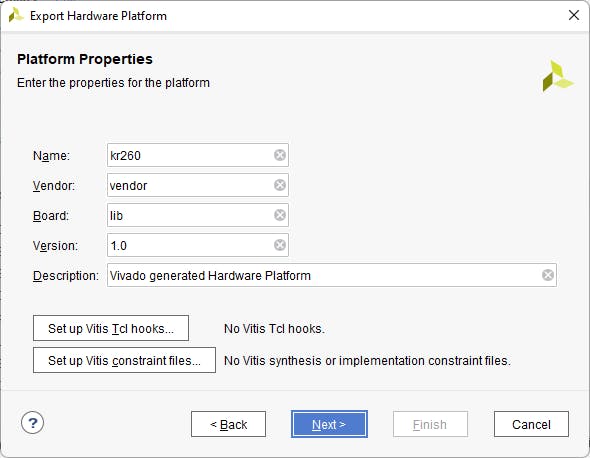
- 更改所需的平台属性。
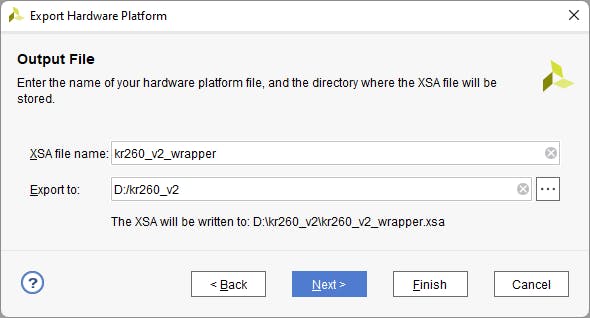
- 输入 XSA 的名称并选择要将 XSA 导出到的文件夹,然后选择完成。
Petalinux 流程:
Sense HAT 传感器的驱动程序可用性
为了集成 SenseHAT 传感器,我们必须拥有这些传感器的 Petalinux 驱动程序或 linux 驱动程序。对于 SenseHAT,大多数传感器的 C/C++ 驱动程序都可以从供应商那里获得。一些驱动程序也是由独立开发人员编写的。
湿度/温度
加速度计/陀螺仪和磁力计
压力/温度
- https://github.com/ameltech/sme-lps25h-library
- https://github.com/kirananto/RaZorReborn/tree/master/drivers/sensors/pressure/lps25h
Petalinux 开发:
先决条件
创建 petalinux 项目需要支持的 BSP,可从以下链接下载。也可以在没有 BSP 的情况下创建项目,但不太方便。
- 从 Xilinx 下载为开发板下载支持的 BSP。
- 下载链接:https://www.xilinx.com/member/forms/download/xef.html? filename=xilinx-kr260-starterkit-v2022.2-10141622.bsp
创建、配置和构建 Petalinux 项目
下面列出了创建 petalinux 项目的步骤。
● 创建一个文件夹并复制从Vivado 导出的平台(XSA)。
● 同时复制 Vivado 生成的 BIN 文件,位于 /.runs/impl_1/.bin
● 在目录中打开终端并获取petalinux 脚本。
● 运行以下命令创建名为 的petalinux 项目。
petalinux-create --type project -s to-bsp> --name name>
● 运行以下命令配置项目。
petalinux-config --get-hw-description
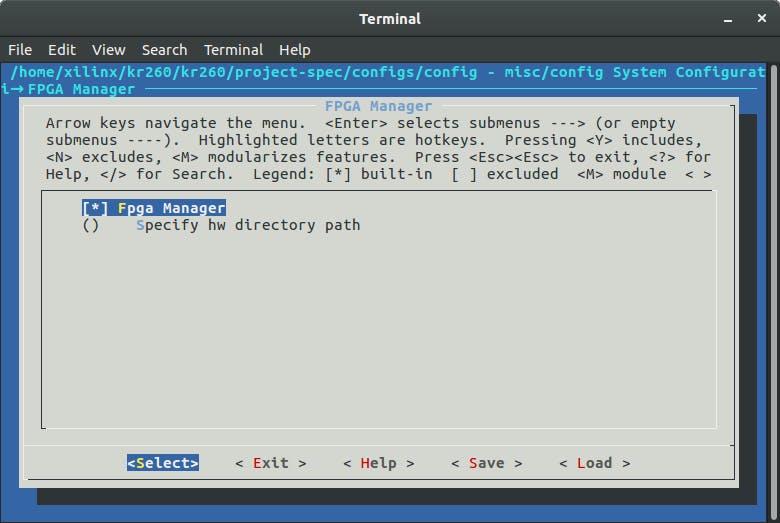
● 在项目配置窗口中,
○ 在 FPGA 管理器下启用 FPGA 管理器。
- 在图像打包配置下,
- 将根文件系统类型更改为 INITRD
- 将 INITRAMFS/INITRD 映像名称更改为 petalinux-initramfs-image
- 禁用 Copy final images to tftpbootUnder Image Packaging Configuration,
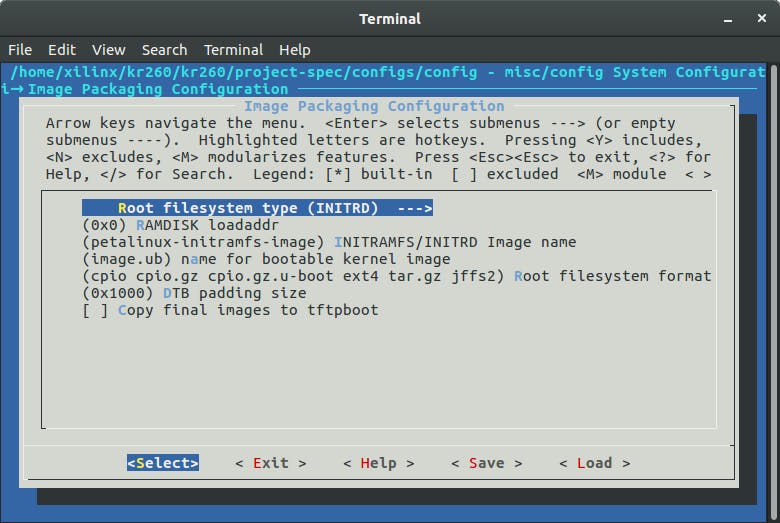
- 保存并退出配置窗口。
- 运行以下命令来配置内核。
petalinux-config -c kernel
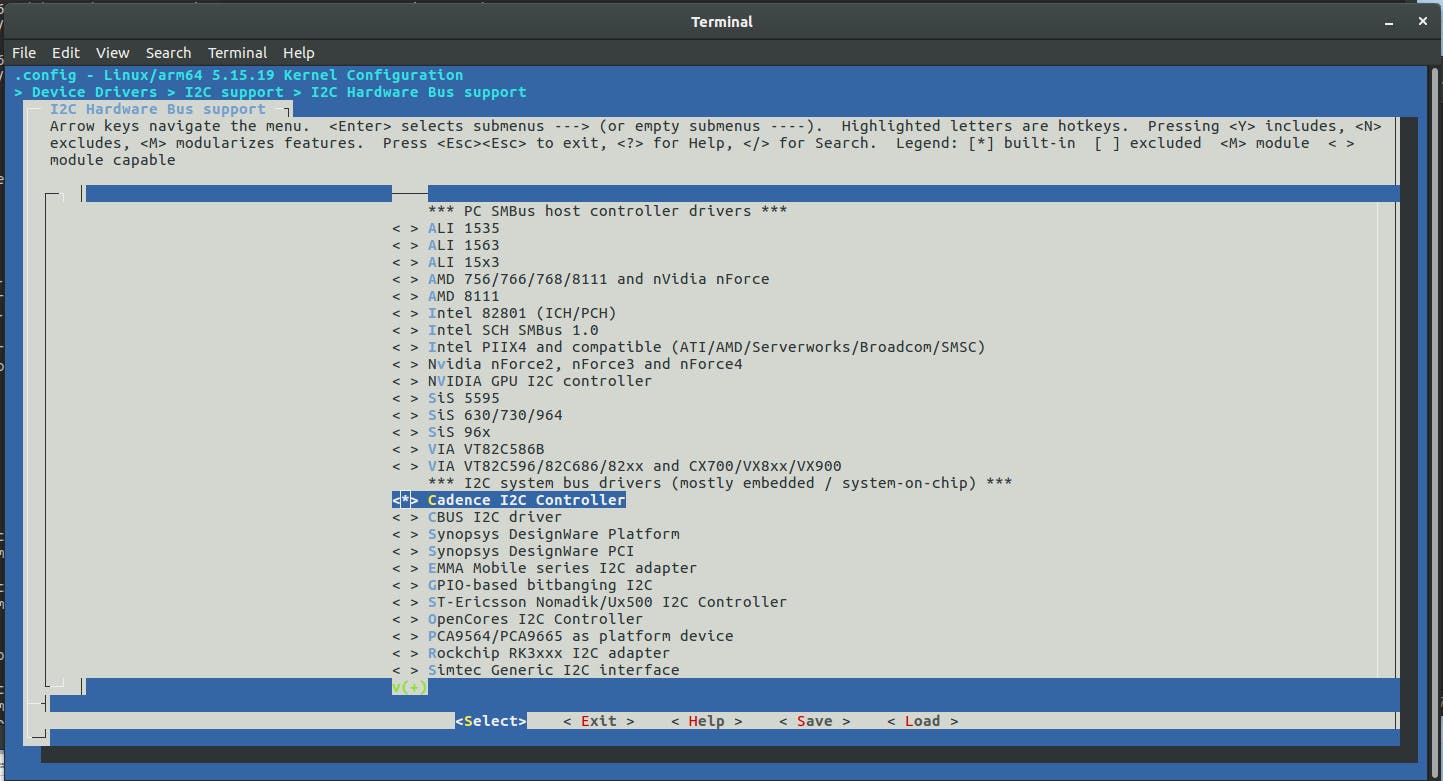
- 保存并退出配置。
- 运行以下命令来配置根文件系统。
petalinux-config -c rootfs
- 在 Filesystem Packages > base > i2c-tools 下,启用
- i2c-工具
- i2c-工具-dev
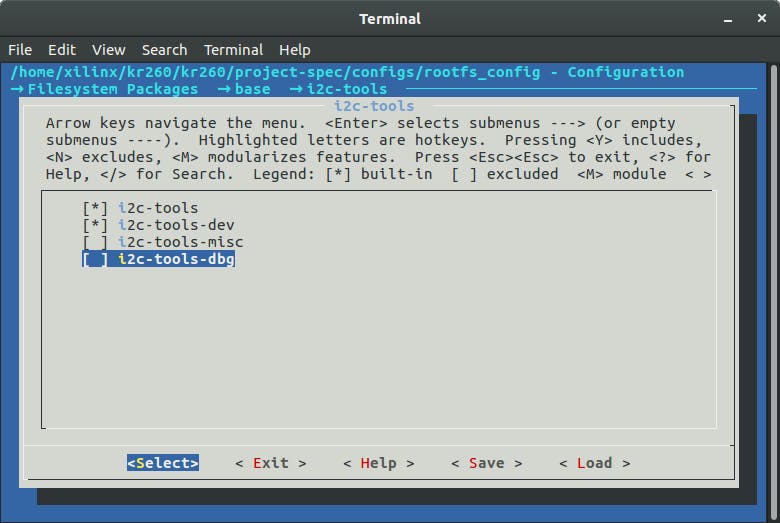
- 保存并退出配置。
- 运行petalinux-build来构建项目。
生成/创建可引导映像
- 运行以下命令以创建可引导的 WIC 映像。
petalinux-package --wic --images-dir images/linux/ --bootfiles "ramdisk.cpio.gz.u-boot, boot.scr, Image, system.dtb, system-zynqmp-sck-kr-g-revB.dtb" --disk-name "sda"
- 确保 dtb 文件存在于 /images/linux/ 目录中。
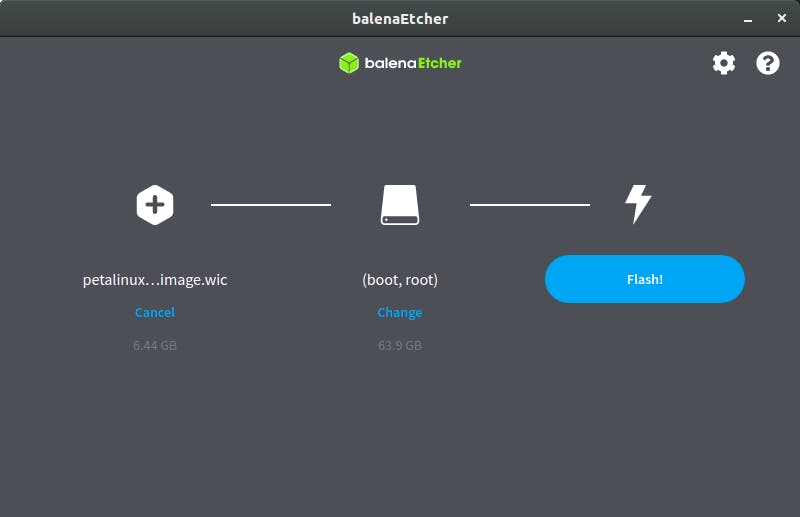
- 下载、安装并运行 BalenEtcher。
- 在 images/linux 目录中找到 WIC 映像。
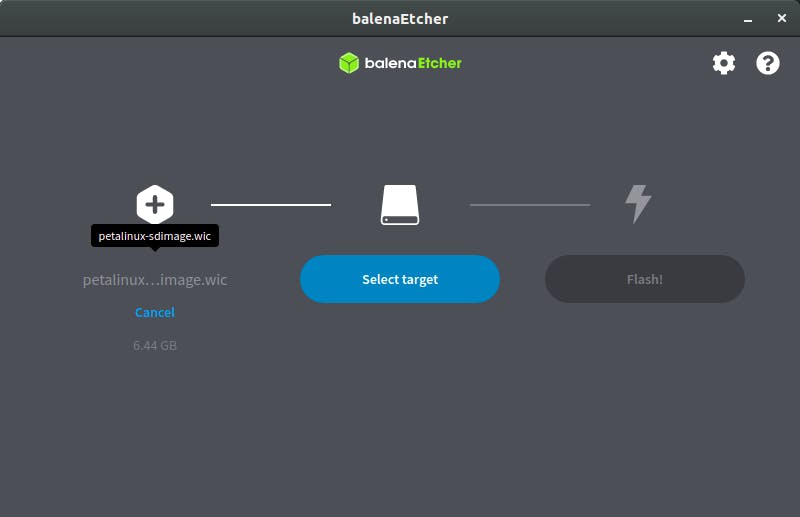
- 选择目标设备并选择 Flash。
准备覆盖:
生成设备树覆盖
- 在复制 XSA 的目录中打开终端。在这里再次获取 Petalinux 并运行xsct命令。
- 如果系统找不到 xsct 命令,请确保获取 Vitis 或 PetaLinux shell 脚本。
- 如果在运行 Petalinux shell 脚本后 xsct 命令仍然缺失,请运行以下命令。
PATH="${XSCT_TOOLCHAIN}/bin:${PATH}"
- 运行以下“HSI”命令将在当前目录中提取 XSA 的内容。
hsi::open_hw_design ./.xsa
createdts -hw ./name>.xsa -zocl -platform-name platform-name> -git-branch -overlay -compile -out ./name-is-better>
- 运行上面的命令将:
- 从 Xilinx 设备树生成器 repo 克隆分支
- 在.////psu_cortexa53_0/device_tree_domain/bsp/ 目录

- 退出xsct外壳。
注意:以下命令可以在没有 Petalinux 脚本源的常规终端中运行。
- 运行以下命令编译设备树。
dtc -@ -O dtb -o ./kr260.dtbo ./kr260_dt/kr260_dt/kr260/psu_cortexa53_0/device_tree_domain/bsp/pl.dtsi
- 确保编辑 pl.dtsi 的路径。
- 此命令将在当前目录中生成 kr260.dtbo。
- 如果 dtc 抛出“ dtc: invalid option -- '@'”错误,则需要自己编译 dtc。
编译故障码
- 运行以下命令。
git clone https://git.kernel.org/pub/scm/utils/dtc/dtc.git
cd dtc
make
- 如果遇到“cc1: all warnings being treated as errors”,编辑 dtc 目录中的 Makefile 并从 CFLAGS 中删除 -Werror 标志。
make install
- 运行上面的命令将在 $HOME/bin.. 中安装 dtc
重试编译设备树
- 运行 cd../ 移出 dtc 目录
- dtc -@ -O dtb -o./kr260.dtbo./kr260_dt/kr260_dt/kr260/psu_cortexa53_0/device_tree_domain/bsp/pl.dtsi
将文件传输到设备
- 运行以下命令创建 shell.json。
echo '{ "shell_type" : "XRT_FLAT", "num_slots": "1" }' > shell.json
- 将 Vivado 实现目录中的 bin 文件重命名为您命名 dtbo 的相同名称。
- 我已将它们重命名为 kr260.bit.bin 和 kr260.dtbo。
- 将 Sense HAT 连接到 KR260 接头。
- 现在启动设备并登录。
- 用户名和密码默认为petalinux 。
- 在设备主目录中创建一个目录。
mkdir ~/<any-directory-name>
- 将您的设备连接到路由器并通过运行 ifconfig 命令查找 IP 地址。如果您在路由器设置中为设备分配静态 IP 会更好。
- 在主机上运行 scp 命令以将文件传输到设备。
scp ./kr260.bit.bin ./kr260.dtbo ./shell.json petalinux@:~/
在 I2C 总线上加载覆盖和检测设备
- 将包含 kr260.bit.bin、kr260.dtbo 和 shell.json 的目录移动到 /lib/firmware/xilinx/。
sudo mv ./ /lib/firmware/xilinx/
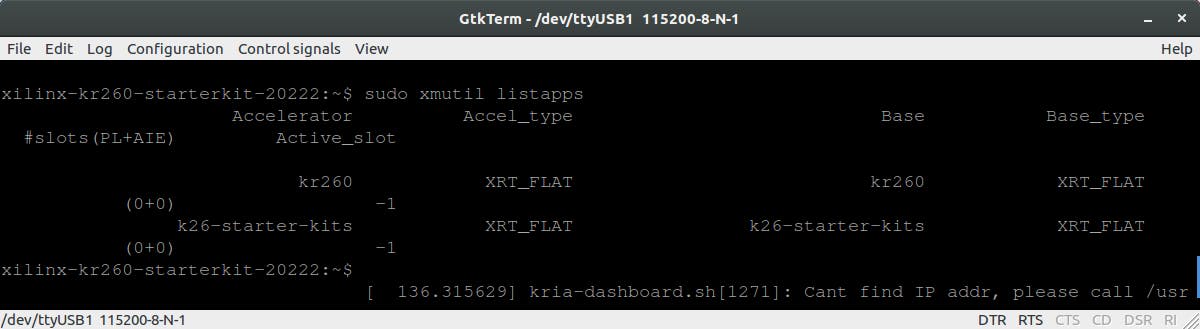
- 列出设备上存在的应用程序。
sudo xmutil listapps
- 卸载当前应用程序。
sudo xmutil unloadapp
- 加载您的应用程序(在本例中为 kr260)。
sudo xmutil loadapp kr260
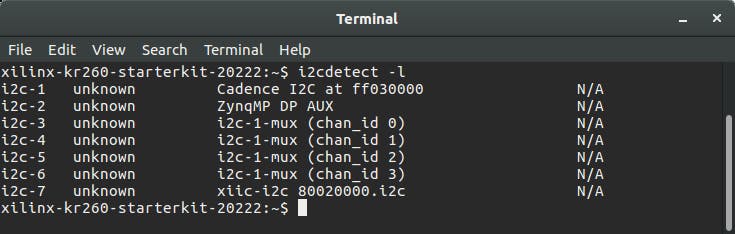
- 检查 XIIC 是否在系统中被列为 I2C 总线。
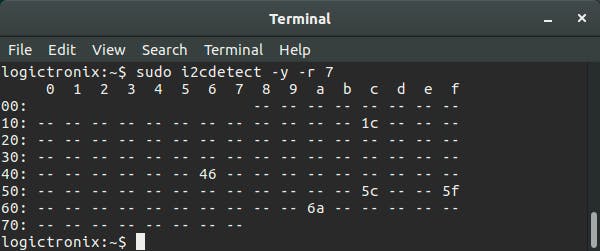
i2cdetect -l
- 这将列出系统中的所有 I2C 总线(在本例中为 i2c-7)。
- 检查 XIIC 总线上的设备。
I2cdetect -y -r <i2c-bus-number>
- 这将显示连接到 I2C 总线的传感器的地址。
- 如果 Sense Hat 正在工作,它应该显示以下地址。
- 以下 I2C 总线 7 的地址映射显示了来自 Sense HAT 的所有传感器地址。这些地址也在表 1 中列出。
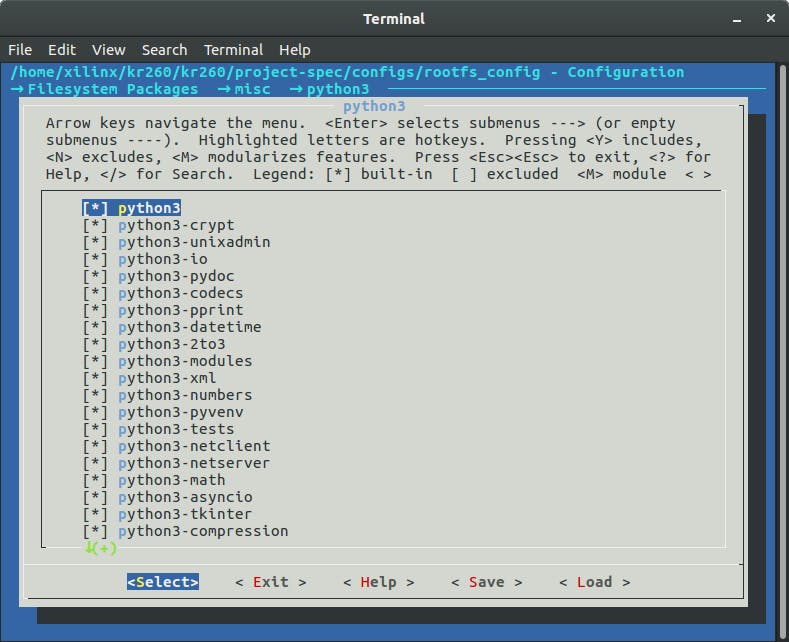
使用 Python 与传感器通信
要使用 python 与连接到总线的传感器进行通信,需要安装 python 包。
安装 pip,Python 的包安装程序
要安装所需的包,需要 pip。由于 petalinux 没有启用 pip 的选项,因此应手动安装。
值得庆幸的是,安装 pip 非常容易。按照以下步骤操作。
- 在终端中运行以下任何命令以下载 get-pip.py python 脚本。
wget https://bootstrap.pypa.io/get-pip.py
curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py
- 运行 python get-pip.py 并等待它完成。
- 如果上述命令不起作用,请运行 python3 get-pip.py。
安装 SMBus
要安装 SMBus,请运行pip install smbus。SMBus 通过 i2c-dev 为 Linux SMBus 访问提供 python 绑定。
编写一个粗糙的 python 应用程序
为了与传感器通信,我们需要一个 SMBus 类的对象,它为我们提供了使通信更容易的各种功能。我们通过传递传感器所连接的 I2C 总线编号来创建 SMBus 类的新实例。
bus = smbus.SMBus(<i2c-bus-number>)
使用总线对象,我们可以访问以下功能,帮助我们从/向传感器寄存器读取/写入数据。
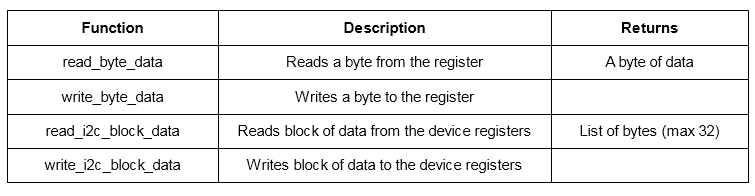
为了从传感器获取数据,我们将特定字节数据写入控制寄存器,以启用/禁用设备中的某些功能。最重要的一步是将传感器置于活动模式,这将开始感应并将结果存储在其内部寄存器中。然后我们可以读取这些寄存器并使用也存储在其他寄存器中的校准数据进行计算。
校准数据存储在内部非易失性存储器中,并在开机时写入校准寄存器。
有关寄存器及其描述的详细信息,请查看传感器的数据表。
与传感器通信的通用方式
设备上的所有传感器都遵循类似的配置和校准方法。
- 设置输出数据速率和平均
- 输出数据速率指定更新输出数据的频率
- 平均给出所选样本数量的平均值
- 激活传感器
- 读取并存储校准数据
- 读取输出值并应用校准
代码片段
# HTS221 Sensor Initialization
def HTS221_Init():
temp = bus.read_byte_data(HTS221_ADDRESS, HTS221_CTRL1)
temp |= HTS221_CTRL1_MASK
bus.write_byte_data(HTS221_ADDRESS, HTS221_CTRL1, temp)
# Reading Temperature from Sensor
def HTS221_T_ReadTemp():
buffer = bus.read_i2c_block_data(HTS221_ADDRESS, HTS221_T0_C_8 | 0x80, 2)
tmp = bus.read_byte_data(HTS221_ADDRESS, HTS221_T1_T0)
T0_degC_x8_u16 = ((tmp & 0x03) << 8) | buffer[0]
T1_degC_x8_u16 = ((tmp & 0x0C) << 6) | buffer[1]
T0_degC = twos_complement(bin_str((T0_degC_x8_u16 >> 3), 16), 16)
T1_degC = twos_complement(bin_str((T1_degC_x8_u16 >> 3), 16), 16)
buffer = bus.read_i2c_block_data(HTS221_ADDRESS, HTS221_T0_OUT | 0x80, 4)
T0_out = twos_complement(bin_str(((buffer[1] << 8) | buffer[0]), 16), 16)
T1_out = twos_complement(bin_str(((buffer[3] << 8) | buffer[2]), 16), 16)
buffer = bus.read_i2c_block_data(
HTS221_ADDRESS, HTS221_TEMP_OUT_L | 0x80, 2)
T_out = twos_complement(bin_str(((buffer[1] << 8) | buffer[0]), 16), 16)
temperature = (T_out - T0_out) * (T1_degC - T0_degC) / \
(T1_out - T0_out) + T0_degC
return temperature
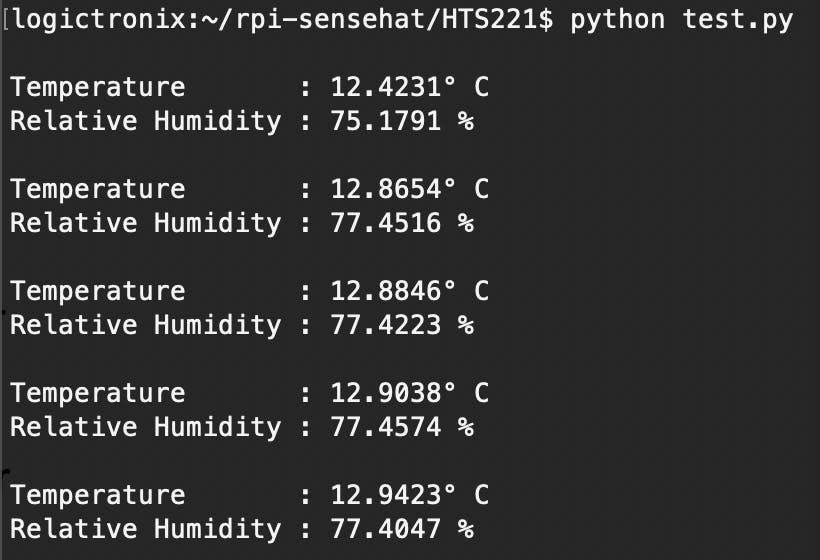
传感器的输出
HTS221 传感器的温度和湿度读数
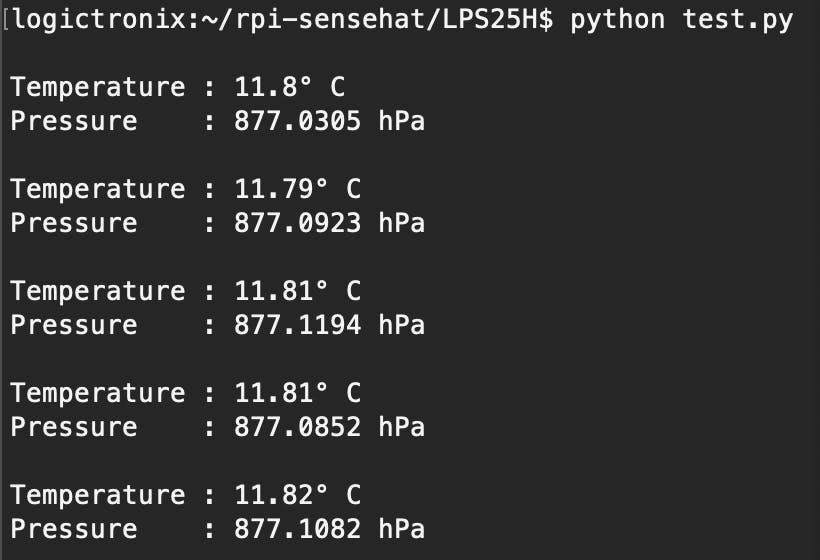
LPS25H 传感器的温度和压力读数
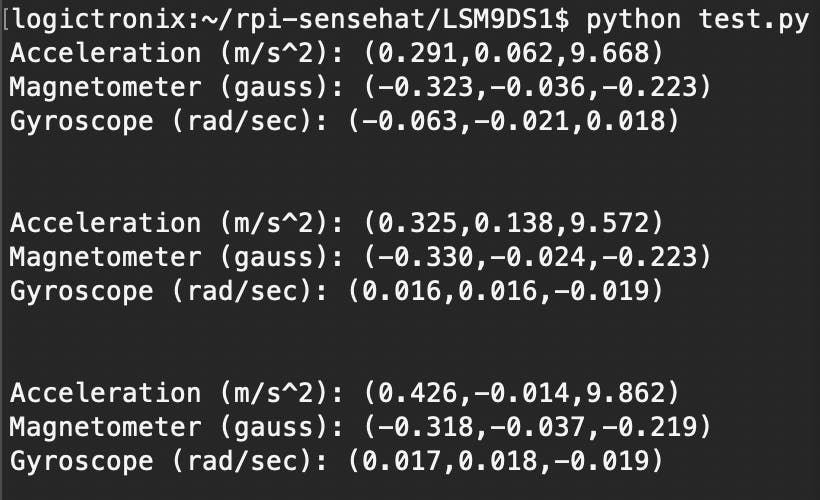
LSM9DS1 传感器的加速度、磁力计和陀螺仪读数
本教程的VIVADO、Petalinux工程源码和Python源码查看:Github【Git分支:SenseHAT-Sensors】
您可以在您的 PC 上通过以下命令克隆 Git Branch:
git clone -b SenseHAT-Sensors https://github.com/logictronix/kr260-sensehat-petalinux
感谢 Frank Shrestha [frank_shrestha@logictronix.com] 创建了这个“深入”教程!
- Kria KV260视觉AI入门套件用户指南
- Kria KR260机器人入门套件:通过硬件加速释放机器人
- 适用于AWS IoT Greengrass的Xilinx KV260入门指南
- 创建自定义Kria KV260加速ML应用程序
- Xilinx KV260 Vitis-AI 1.4人脸检测
- 为Kria KV260添加USB WiFi
- Kria KV260 AI视觉套件入门
- Xilinx Kria KV260套件的第一个硬件项目
- Vivado 2021.1中的Kria KV260入门
- 使用Xilinx Kria KV260进行AI火灾探测
- Xilinx KV 260构建一个人脸识别车库门锁
- Kria KV260上的动态交通灯系统
- PetaLinux 2020.1 ubuntu 安装
- 基于XILINX的SPARTAN板的VGA接口显示程序 8次下载
- 利用XILINX解决方案快速创建存储器接口设计
- 使用Python提取ILA数据的流程 468次阅读
- AMD Xilinx 7系列FPGA的Multiboot多bit配置 991次阅读
- AMD Kria KR260 DPU配置教程3 1098次阅读
- AMD Kria KR260 DPU配置教程2 1840次阅读
- AMD Kria KR260 DPU配置教程 862次阅读
- 基于AMD SOC的QT应用程序开发 908次阅读
- AMD-Xilinx FPGA功耗优化设计简介 1276次阅读
- petalinux安装过程 2866次阅读
- petalinux是什么?petallinux是如何设计的 1.2w次阅读
- Docker里玩转PetaLinux的上手教程 2345次阅读
- ubuntu16.04如何安装petalinux_2017.4 2518次阅读
- Xilinx FPGA JTAG接口转换成USB接口的方法 1.6w次阅读
- 基于Ubuntu的PetaLinux安装教程 6399次阅读
- petalinux如何用SD卡上的设备树_步骤教程 7810次阅读
- petalinux(二)开启petalinux内核调试模式 1w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论