 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍
我的第一个机械臂是Arduino TinkerKit Braccio 。随着我对机器人手臂的了解更多,我产生了使用反向运动学库并连接到机器人操作系统 (ROS) 等方面的愿望。在具有更大处理器和更多内存的微控制器上,这些目标变得比 Braccio 设计的屏蔽所提供的 Uno 更容易。我选择了 Arduino Due 作为微控制器的下一个迭代。
现在我必须想办法制作一个向后兼容的替代 Braccio 盾牌,以适用于 Arduino Due。
设计
对于电子产品来说仍然相对较新,我更喜欢使用现成的模块为伺服系统提供次级更高电流的电源。我知道我必须小心保护 3.3V Arduino Due 免受 Braccio 伺服器的更高电压和电流(5V 4A)的影响,我有点担心自己设计它。
我选择了一个基于 I2C 的Adafruit 模块。我通过研究和测试发现,该模块在逻辑端兼容 3.3V,同时在伺服端仍然能够提供 Braccio 标准的 5V 4A 电源。这种方法的一个有趣的副作用是输出到每个伺服系统的 PWM 信号具有 3.5V 的 Vpp(电压峰峰值),伺服系统仍将其识别为高 TTL 逻辑电平。
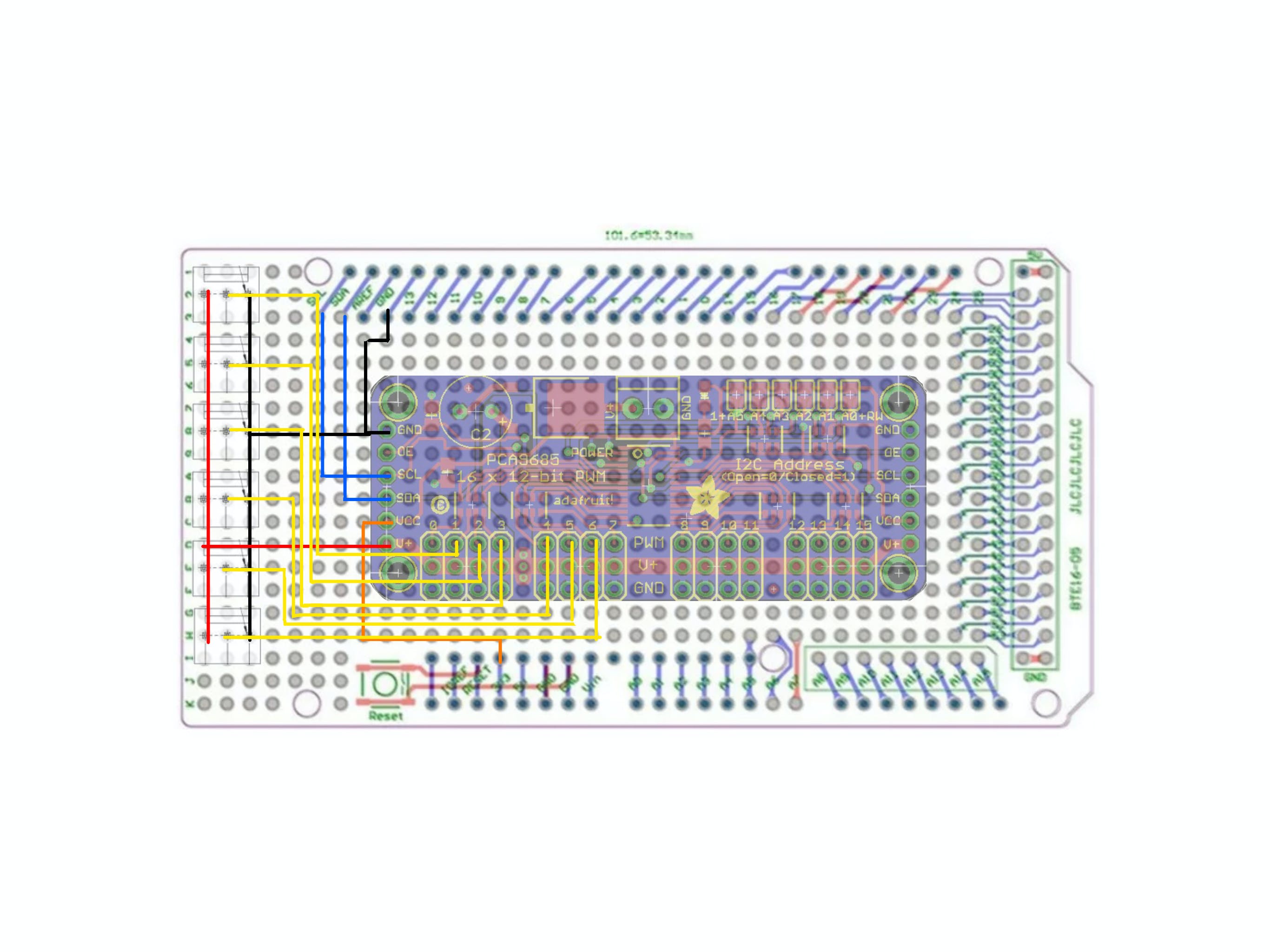
Arduino Due 尺寸的原型设计护罩旨在作为 Adafruit 模块和伺服引线连接器的简单安装机制。唯一需要的 Arduino Due 引脚是 I2C 线接口和逻辑电路的电源。选择Wire1只是为了保持连接整洁和最小化(Arduino Due 有两个 I2C/wire 接口)。
- D71 (SCL1) 连接到 PCA9685 SCL
- D70 (SDA1) 转 SDA
- 3V3 转 Vcc
- 地到地
找到原始 Arduino Uno Braccio 屏蔽上使用的特定三线连接器是保持物理兼容性的关键。这些被确定为 Molex KK-254(也称为 KF2510)连接器。重要的是要注意,与大多数其他爱好者伺服器相比,Braccio 连接的接线是非常规的。您不能只修改 Braccio 伺服连接器并将它们直接插入 PCA9685 模块,因为引脚的排列方式不同。
建造
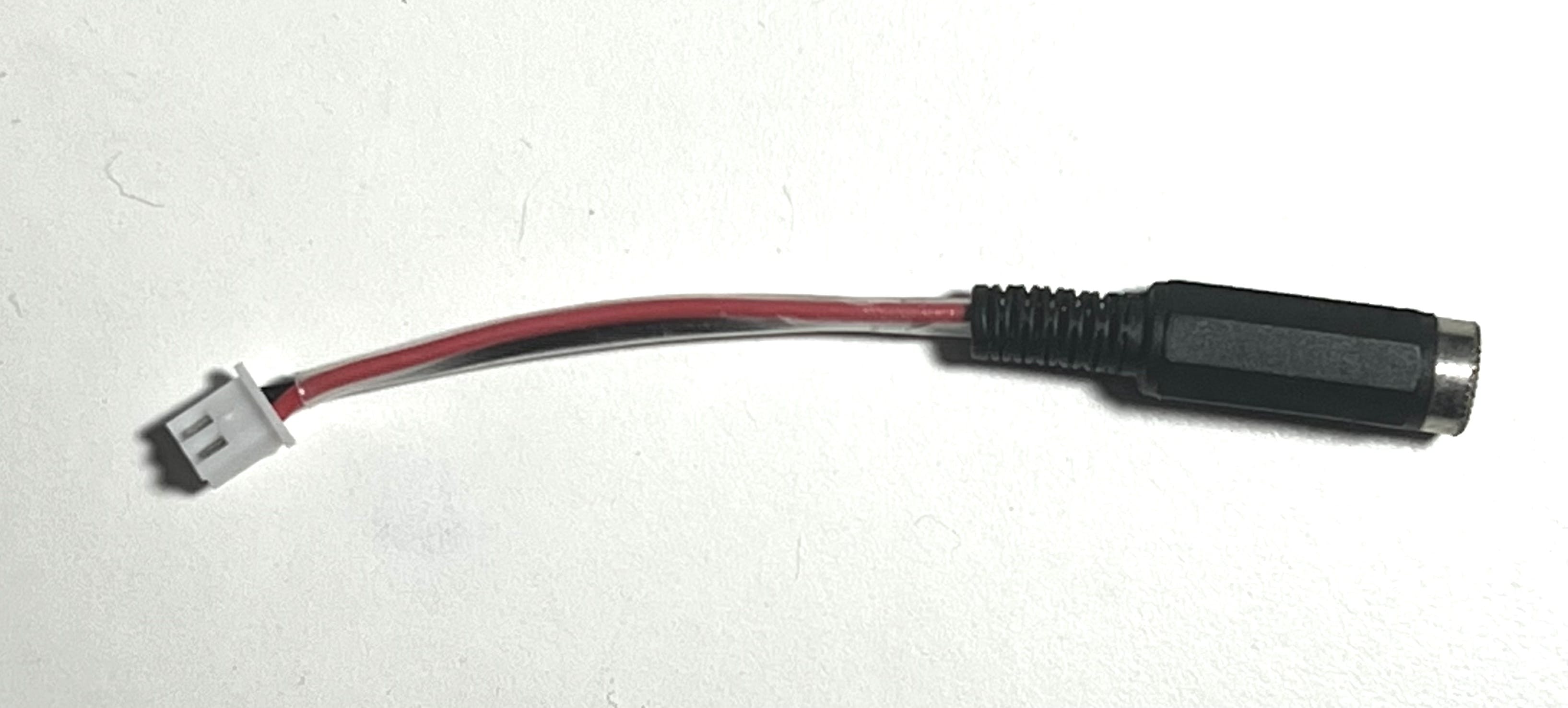
PCA9685 通常配有螺丝门电源端子,用于连接外部电源。我选择将其换成直角安装 JST XH 连接器。我承认这有点混乱,因为引脚对齐不完全匹配,JST 连接器上的腿必须张开一点。如果连接器不是直角类型,那么这种不当处理会使引脚错位。然后我手工制作了一个短电源适配器引线(见照片),以使原来的 Braccio 壁式插头电源仍可用于为伺服系统供电。
信号连接焊接到 PCA9685 上的引脚 1 到 6,以将引脚编号与 Braccio 伺服编号方案对齐。
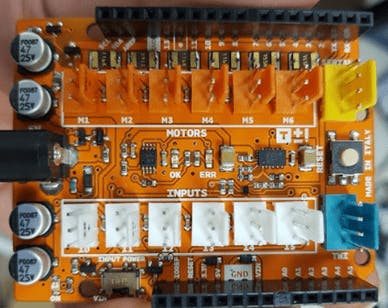
您可能会在下面的照片中注意到,仅连接了相对较少的插头引脚,以使屏蔽罩易于安装和拆卸。由于屏蔽层的高度,我没有使用可堆叠的接头,但事后看来,这对于以后访问其他 arduino 引脚很有用(例如,如果您要添加其他传感器)。
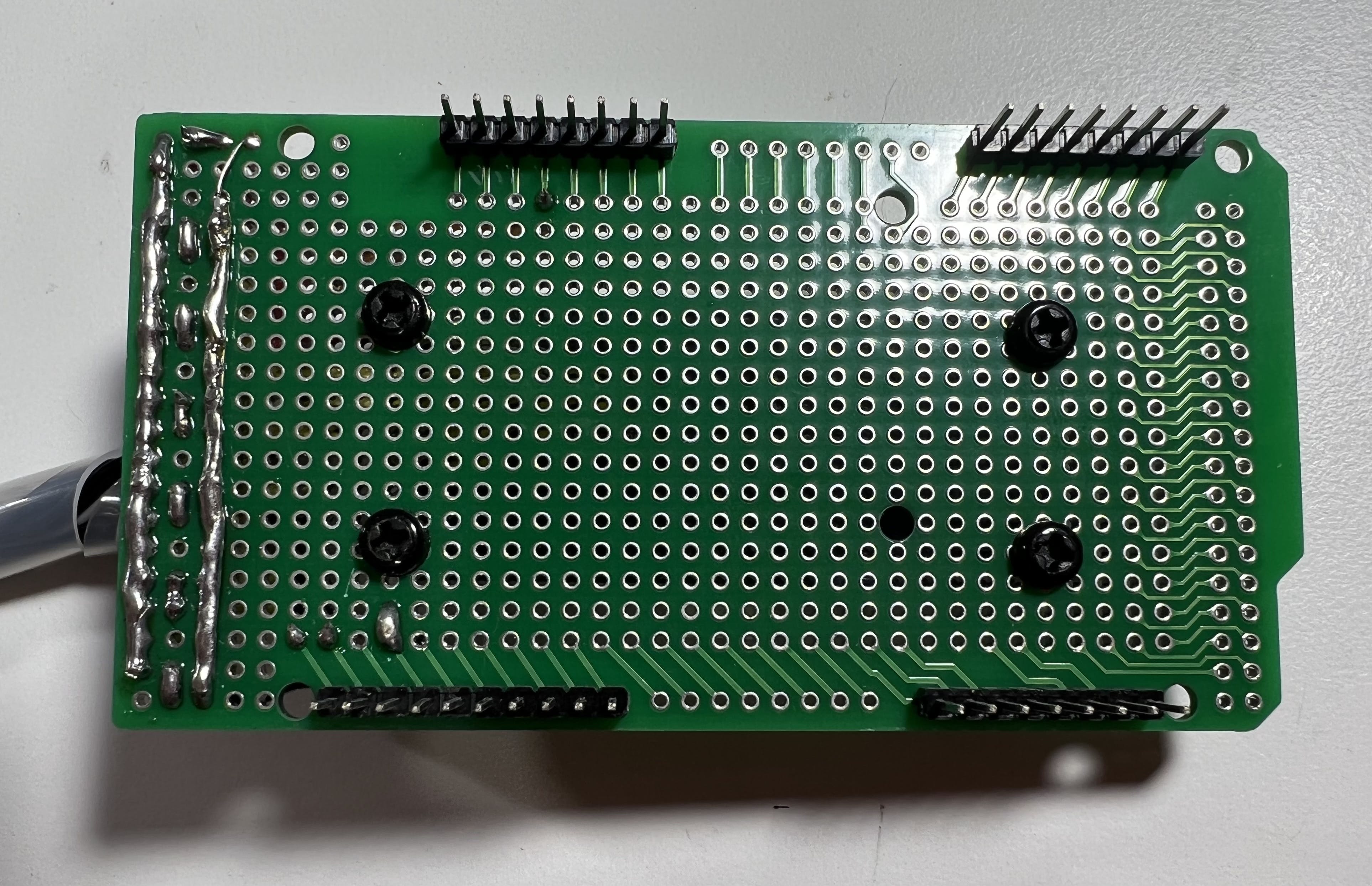
Molex KK 连接器的 V+ 和 GND 连接被焊接为轨道。每个 PWM 信号焊接到每个连接器的中间引脚。
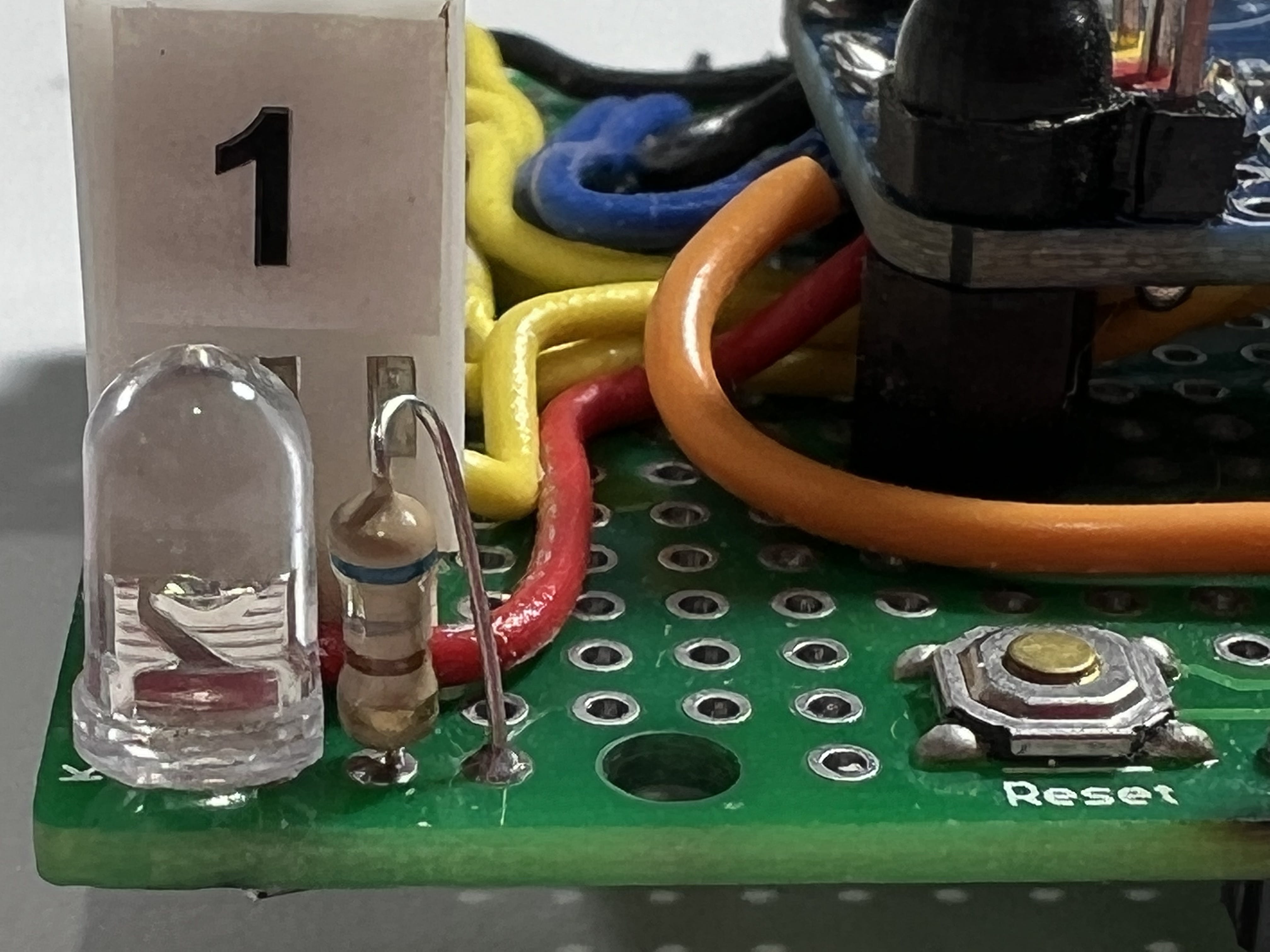
在下面的照片中,您可能会注意到图片左上角有一些无法解释的额外焊接连接。这是我稍后添加的 LED 电机电源指示灯和随附的电阻器。见下面的特写。
反射
当我将接线直接焊接到 PCA9685 上的引脚 1 到 6 时,我没有焊接这些端口上的引脚接头。事后看来,排针对于连接测试设备(例如,万用表和示波器)很有用。
当我开始构建另一个机械臂时,我重用了这种设计方法。新臂使用传统的爱好者伺服连接,可以直接连接到 PCA9685 排针,无需 Molex-KK 连接器。原型屏蔽上提供的额外空间对于断开传感器连接器和其他东西很有用。
- Scorbot ER-V+自由度机器人手臂控制器和模拟器设计
- DIY Arduino蓝牙控制机器人
- 用于Arduino Due的简单DIY双端口I2C电平转换屏蔽
- Arduino机器人手臂 3次下载
- 构建可帮助人们做早餐的桌面智能机器人手臂
- 基于Arduino的DIY避边机器人 0次下载
- DIY arduino UNO防护罩
- 机器人手臂运动学和动力学研究综述 3次下载
- 微型电机在机器人手指关节的应用及分类 1次下载
- MH6S工业机器人手册 10次下载
- Arduino与树莓派打造Chatbot语音控制机器人手臂 30次下载
- 机器人学之机器人手臂的机械结构和机电设置详解 22次下载
- 工业机器人手臂快速碰撞检测算法 23次下载
- arduino_Due_Reference_design 46次下载
- 高级机器人手册 28次下载
- 如何创建FPGA控制的机器人手臂 899次阅读
- DIY一个简单的Arduino板子 5350次阅读
- 如何使用Arduino制造一个自动平衡机器人 4429次阅读
- 基于Arduino的DIY梭芯绕线机器的制造过程 5427次阅读
- 基于LPC2138微处理器实现机器人手臂控制器的应用方案 2910次阅读
- dfrobotArduino DUE控制板 介绍 3362次阅读
- 点焊机器人工作原理_点焊机器人的应用 9930次阅读
- ABB工业机器人手册使用方法 8626次阅读
- 四轴机器人和六轴机器人有什么区别? 2.9w次阅读
- 一种极其简单、但功能惊人的机器人手名为SoftHand 2 5253次阅读
- 甲壳虫机器人diy制作详解 3776次阅读
- 解读工业机器人结构、驱动及威廉希尔官方网站 指标 3138次阅读
- 史陶比尔公司推出适用于汽车行业的激光切割机器人 5048次阅读
- 关于机器人专用术语详解 9760次阅读
- DIY一款基于arduino的自动浇花系统 7.5w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论