 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍
您曾经在实验室中使用过涡旋混合器吗?它是用于混合解决方案的便捷工具。当您习惯了它时,您将无怨无悔地使用它。
由于这种设备非常昂贵,但在实验室内并不是绝对必要的,所以我决定制作自己的版本。通过遵循本指南,您还将学习如何制作自己的版本。我希望你会喜欢这本书。
面包板原型
我会开始说,即使零件清单很长,这个设备也可以用周围找到的东西来建造,如果你在破损的物体中寻找备件,你会发现大部分需要的组件而无需花钱。
该装置可以示意如下。
我们将使用振动电机来涡旋我们感兴趣的样品。只有当我们将样品放在电机上时,振动才会开始。这种识别将通过压电传感器实现。一旦显示压力,由旋转电位器控制的interwetten与威廉的赔率体系 信号将被发送到电机驱动器,因此它将涡旋我们的样品。
我们要做的第一件事是在面包板上准备我们的 Arduino 并连接压电传感器,以确保这个家伙能正常工作(图 1 )
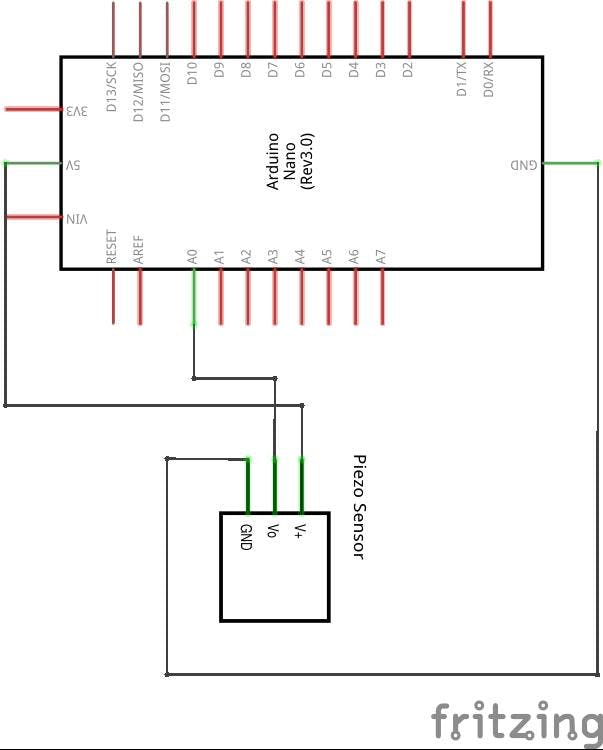
图 1. 带有用于压力检测的压电传感器的 arduino 示意图。
注意:您可以同时使用 UNO 或 Nano,我使用 UNO 进行面包板测试,然后我使用 Nano 制作了真正的原型。
为了让这个传感器正常工作,只需要几行代码(图 2 )。
#define PRESSURE A0
[...]
void pressure_baseline (int *baseline);
[...]
int baseline = 0;
int *ptr_baseline = &baseline;
void setup() {
[...]
pressure_baseline(ptr_baseline);
}
[...]
void pressure_baseline (int *baseline) {
for(int i = 0; i <10; i++){
*baseline = *baseline + analogRead(PRESSURE);
delay(500);
if (i == 9){*baseline = *baseline/10;}
}
}
图 2. 传感器基值计算所需的代码。
为了避免在设备每次通电时和传感器之间的静止压电传感器的响应差异(我有三个传感器在静止时给出不同的值!),代码调用基线计算函数。这条线计算压电传感器十个值的平均值,这将用作压力检测的阈值。您需要的另一件硬件是电机及其控制器。图 3显示了设置它所需的接线。我们不能将电机直接连接到数字引脚,因为这会提供最大电流输出(最大 20-40mA,具体取决于您使用的电路板),但是 5V 引脚能够提供高达 500mA 的电流,这就足够了对于振动电机!
还添加了一个电位器以控制振动速度。
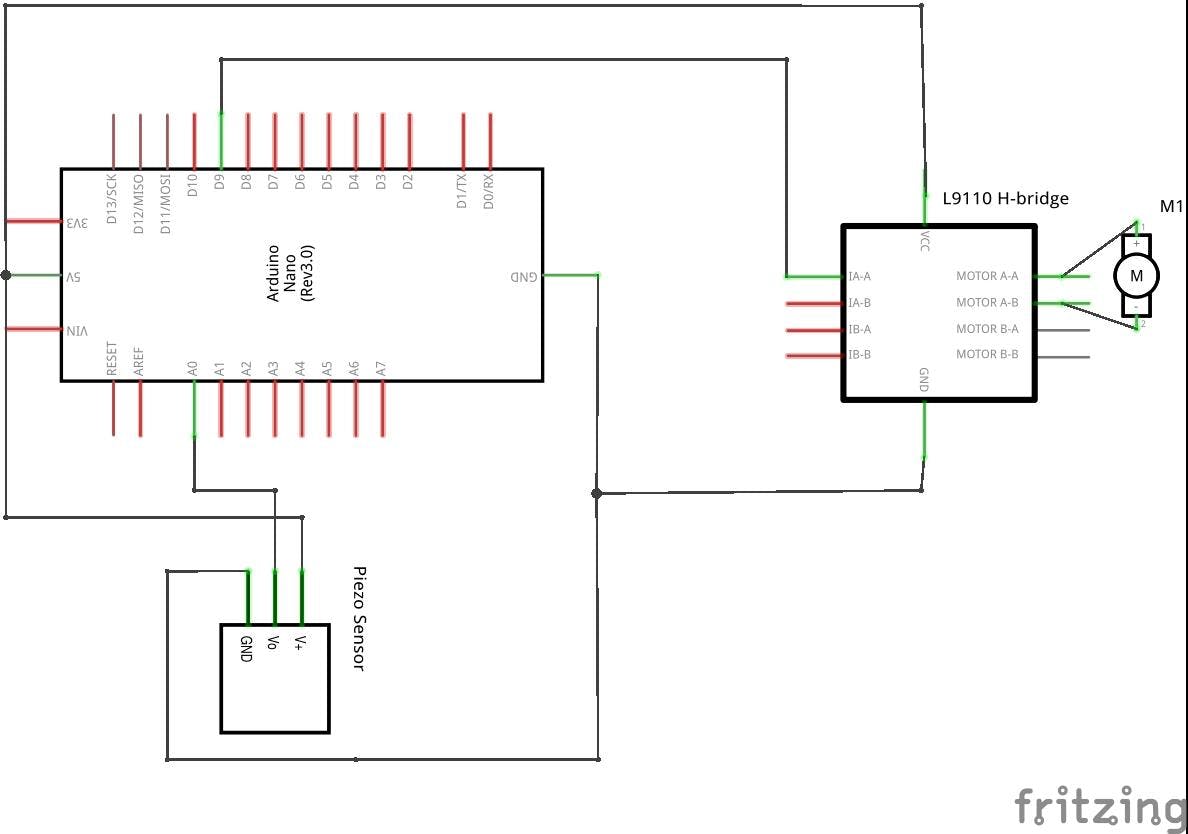
图 3. 带有振动电机和控制板的系统示意图。
然后修改代码以使电机根据对样品施加的压力运行(图 4 )。
#define POTMETER A1
#define MOTORPIN 9
#define ten_to_eight(x) (map(x, 0, 1023, 0, 255))
[...]
void pressure_check (int *baseline);
int *motor_speed (void);
void speed_control (int *speed);
void baseline_drift (int *baseline);
[...]
int counter = 0;
int speed = 0;
void setup() {
pinMode(MOTORPIN, OUTPUT);
[...]
}
void loop() {
pressure_check(ptr_baseline);
baseline_drift(ptr_baseline);
}
[...]
int *motor_speed (void){
speed = analogRead(POTMETER);
speed = ten_to_eight(speed);
return &speed;
}
void motor_control (int *speed){
analogWrite(MOTORPIN, *speed);
counter++;
}
void pressure_check (int *baseline) {
if (analogRead(PRESSURE) > (*baseline + 10) && counter < 20){
while(counter < 20){
int *speed = motor_speed();
motor_control(speed);
delay(500);
}
} else if (counter > 19) {
analogWrite(MOTORPIN,HIGH);
delay(1000);
counter = 0;
}
}
void baseline_drift (int *baseline){
if ( millis() % 3600000 == 0 && counter == 0){pressure_baseline(baseline);}
}
图 4. 电机控制代码。
让我们仔细看看代码及其作用。首先,您需要定义所需的电机和电位器引脚,并将电机引脚设置为输出(图 5 )。
#define POTMETER A1
#define MOTORPIN 9
void setup() {
[...]
pinMode(motorPin, OUTPUT);
[...]
}
图 5. 初始化代码。
其余代码实际上控制着系统的行为方式。需要四个函数。它开始调用 pressure_check(),此函数检查压电传感器上是否有压力以及调用 motor_speed() 时答案是否肯定。这将从电位器计算电机引脚的输出,宏函数 ten_to_eight 将映射八位输出的值(最大值为 180,以避免电机大幅减速)。最后需要的部分是 motor_control() 来激活电机。计数器变量每 0.5 秒增加一次,直到总共 10 秒,然后系统停止 1 秒并等待新循环的进一步压力。最终函数 baseline_drift() 将每小时运行一次,并为压电传感器计算一个新的基值,从而避免漂移。(图 6 )。
void loop() {
pressure_check(ptr_baseline);
baseline_drift(ptr_baseline);
}
[...]
int *motor_speed (void){
speed = analogRead(POTMETER);
speed = ten_to_eight(speed);
return &speed;
}
void motor_control (int *speed){
analogWrite(MOTORPIN, *speed);
counter++;
}
void pressure_check (int *baseline) {
if (analogRead(PRESSURE) > (*baseline + 10) && counter < 20){
while(counter < 20){
int *speed = motor_speed();
motor_control(speed);
delay(500);
}
} else if (counter > 19) {
analogWrite(MOTORPIN,HIGH);
delay(1000);
counter = 0;
}
}
void baseline_drift (int *baseline){
if ( millis() % 3600000 == 0 && counter == 0){pressure_baseline(baseline);}
}
图 6. 循环代码和函数定义。
图 7显示了组装在面包板上的设备。
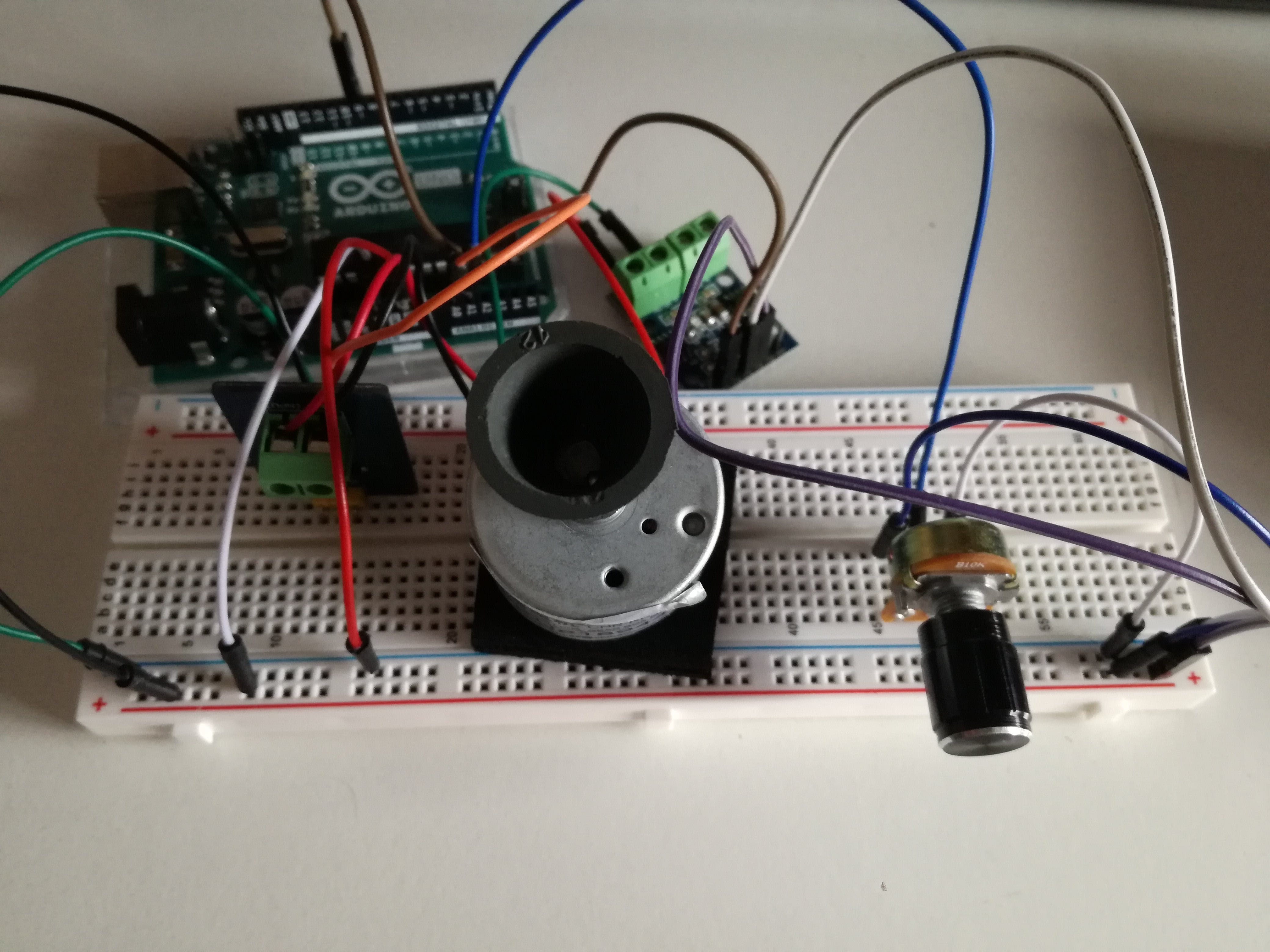
图 7. 面包板上的设备。
如您所见,我确实将压力传感器放在了两个防静电泡沫板之间。所以电机不会直接站在传感器上,也不会直接站在刚性表面上。一些胶水用于将橡胶拐杖固定到电机头上。这块橡胶将在振动开启时用作样品支撑。这将避免任何接触金属/玻璃(如果您使用玻璃容器来混合样品)。
最后一步,您需要为您的设备添加一个开关和一个电源,并打开您的 3D 打印机(图 8 )。
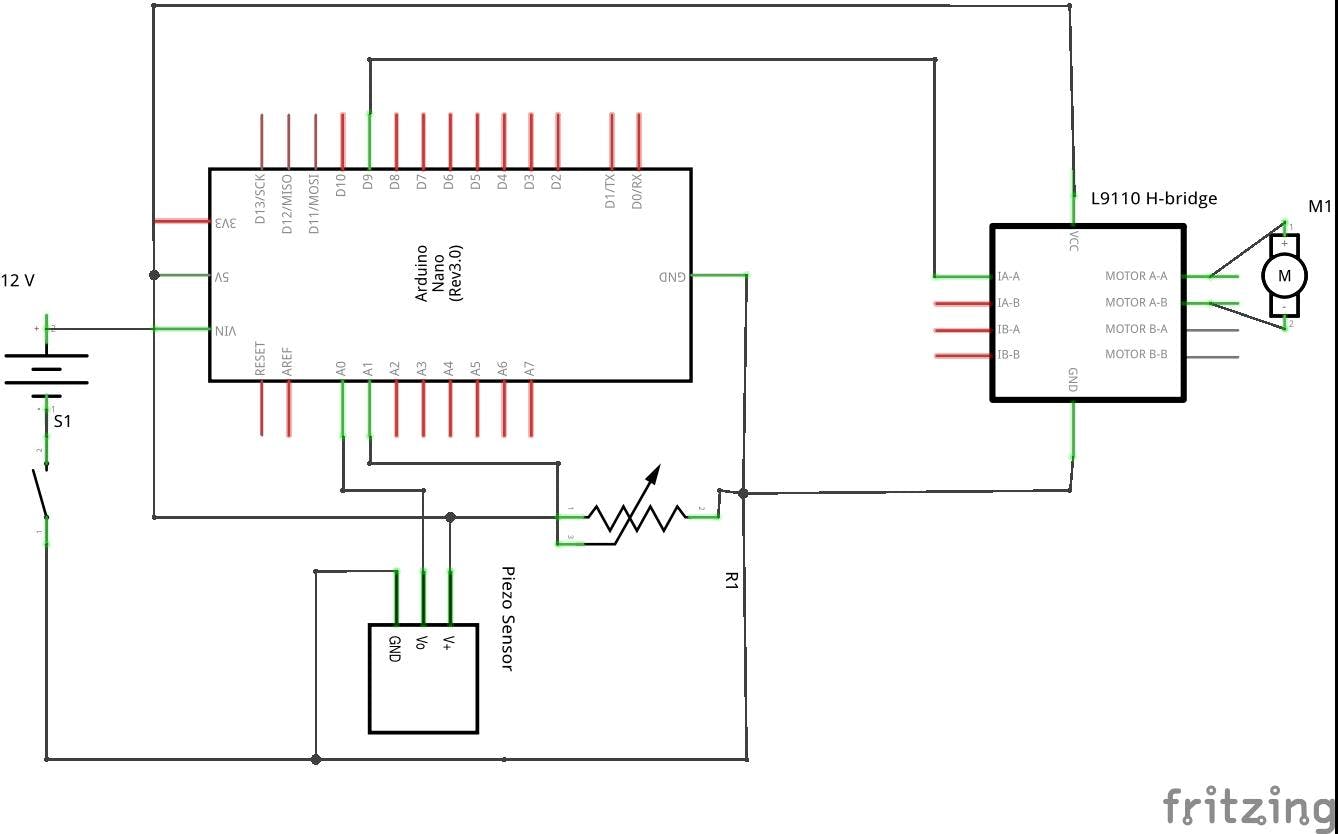
图 8. 带电源和开关的示意图。
编辑:注意,如果您使用 12V 的外部电源,使用电压转换器提供 5V 而不是 12V 可能是个好主意。这很重要,因为我们使用 5V 引脚为振动电机提供电流。内部调节器可能会快速过热并烧毁您的电路板!
实物样机
现在让我们继续讨论真正的原型。对于这部分,您需要打印三个必要的部分。图 9 显示了它们,您可以在页面末尾找到 .obj 文件。
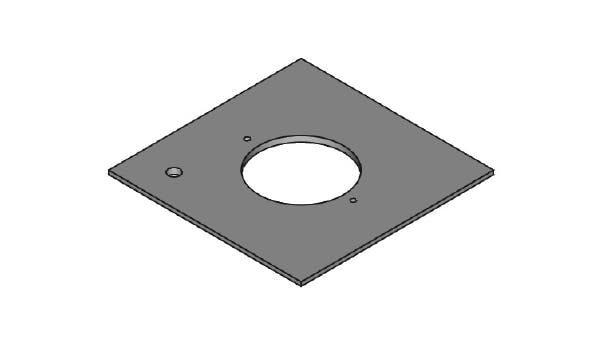
图 9 。用于涡旋原型制作的 3D 组件。
本教程的组装部分非常简单。您需要将所有电子元件放置在底座中。可能需要胶枪来固定所有组件并避免不必要的移动。在中央部分将固定防静电泡沫。图 10显示了每个组件都用胶水固定的基础组件。
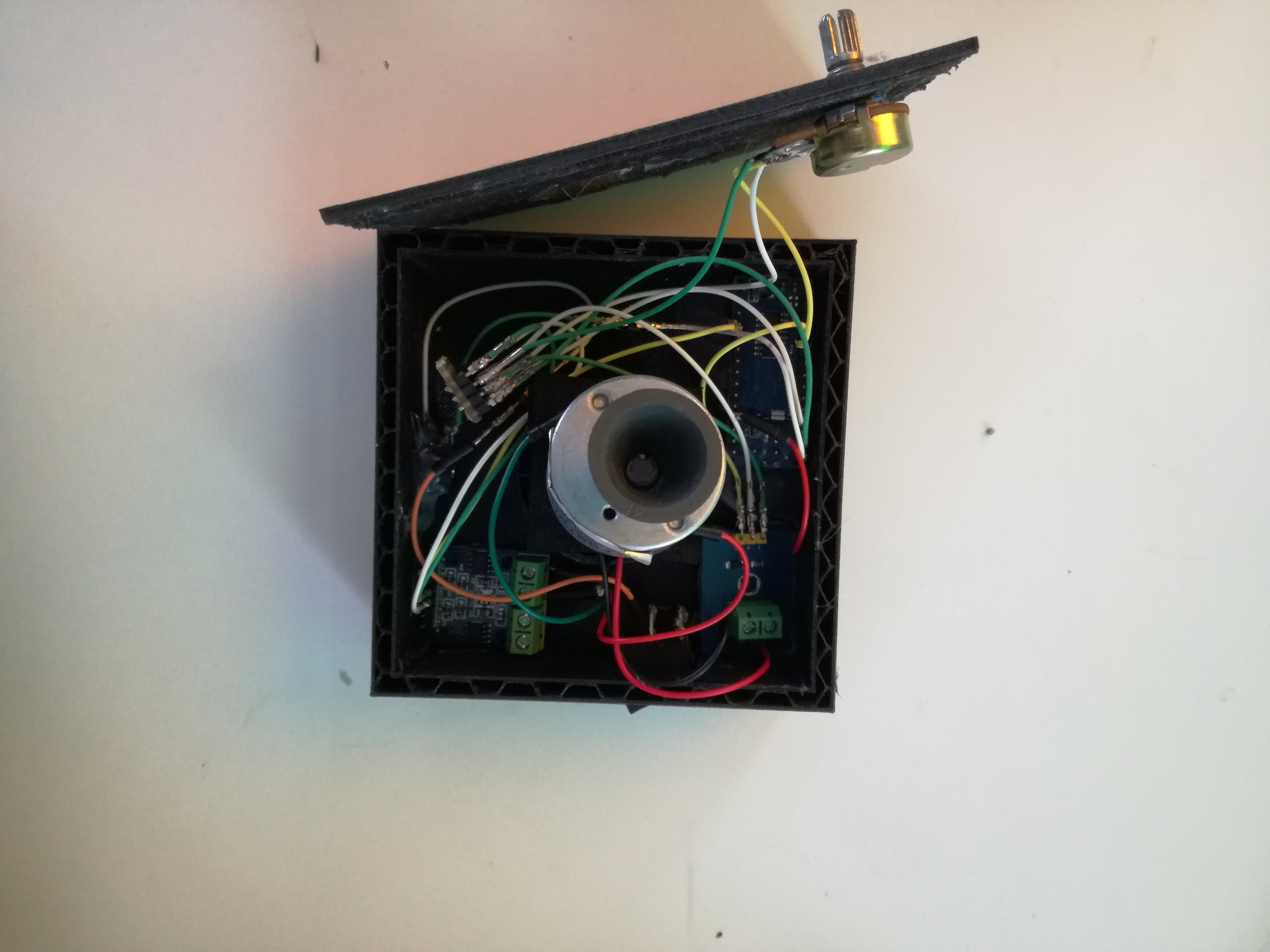
图 10. 原型底座。
如您所见,添加了一个用于 12V 电源的母插孔并将其焊接到 Vin 引脚和地。如果您没有其中之一,您可以随时切断供应商的电线并使用裸线。但是这种方式不干净,因此不建议使用!
对于最后的接触,只需拧上几个螺丝并将电机固定到底座上。插入 12V 电源即可(图 11 )。

图 11. 完整的设备。
我们完成了。最终设备已完成并可以使用。如果振动太强,您可以通过在底座部分增加一些重量来进一步定制您的设备,以避免设备移动!
我希望你喜欢和我一起在实验室里建造这个对日常生活有用的设备。
在下一个教程中见。
- 双平衡混合器M86数据手册 0次下载
- 基于PDMS的静态微流体混合器的制作与仿真
- 模块化音频混合器Mx4.1开源
- 模块化音频混合器Mx4.2开源
- 模块化音频混合器Mx4.3开源
- 用于灯光的DMX RGB混合器
- Arduino Nano混合器开源分享
- 数码涡旋系列精密空调Liebert.PEX用户手册 2次下载
- 宽带、高IIP3混合器可移动更多数据
- 非均匀温度场下涡旋压缩机涡旋盘数值仿真研究 0次下载
- 新型油气混合器的流体域模型 1次下载
- 一种双容混合器控制系统的设计与实现
- 有线电视系统用无源混合器(5~1000MHz)入网威廉希尔官方网站 条件和
- 有线电视系统用无源混合器(5~1000MHz)入网威廉希尔官方网站 条件和
- 基于PIC单片机控制的数字视频混合器
- 音频混合器电路图分享 4952次阅读
- 完美光学涡旋(POV)光束的实验研究 1322次阅读
- 基于完美矢量光学涡旋阵列的通信编解码 444次阅读
- 混合器件的原理及应用 809次阅读
- 混合器的基本功能和应用领域 1044次阅读
- 可见光波段涡旋光的产生威廉希尔官方网站 分析和展望 1811次阅读
- 如何查看混合器芯片的型号 443次阅读
- 紧凑型砷化镓相位正交(I/Q)混频器HMC525ALC4概述 833次阅读
- 桶外搅拌混合器搅拌流场仿真分析 2369次阅读
- 涡旋压缩机工作原理_涡旋压缩机特点 4825次阅读
- 涡旋压缩机常见的四大故障 4247次阅读
- 涡旋压缩机结构图_涡旋压缩机优缺点 1w次阅读
- 涡旋式压缩机的结构_涡旋式压缩机的特点 2.1w次阅读
- 涡旋电子式水表及热能表计算装置及方法 772次阅读
- 如何借助“粒子追踪模块”,开发分析静态混合器性能的App 4515次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论