 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
动机
当灾难袭来时,它往往会突出我们容易忽视的问题。随着世界在 2020 年陷入停顿,其中一个重新受到重视的问题就是卫生设施。在过去的几年里,我们将清洁和卫生视为理所当然,尤其是在商业和公共环境中。但随着新型冠状病毒的爆发,这一切都发生了变化。
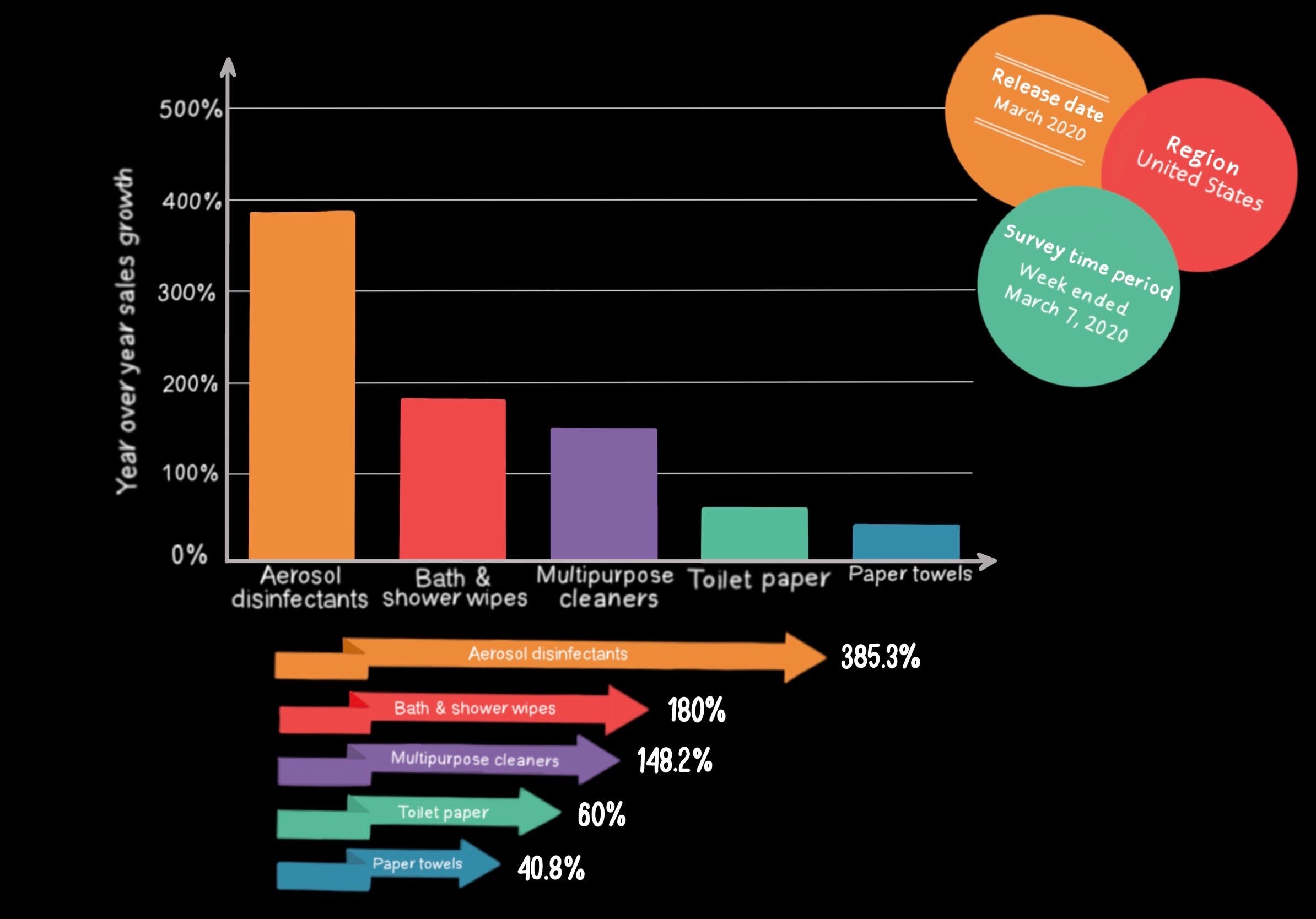
世界各地的人们更加关注他们的周围环境,并且不仅仅对“看起来足够干净”的房间感到满意。上图描绘了去年各种清洁产品销量的大幅增长。尽管消毒剂的使用有所增加,但可以消毒的区域以及消毒剂的质量存在一定的限制。它还使参与清洁活动的人面临许多健康问题。因此,需要一种可靠的替代方案来遏制病原体的传播并让社会重新站起来
我们的解决方案
常规消毒液的一种替代方法是使用 UVC 灯进行房间和表面消毒。
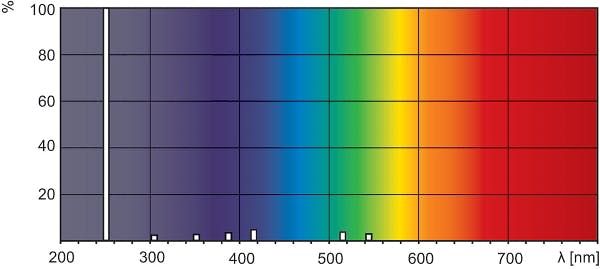
- 紫外线是一种电磁辐射,波长范围为 10nm 至 400nm。紫外线用于卫生目的,因为它无需使用任何有毒化学物质即可杀死细菌和病毒。它通过破坏它们 DNA 的分子键来杀死这些病原体 - 负责将它们保持在一起。有三种不同类型的紫外线:UVA、UVB 和 UVC。
- UVC 射线是最常用和最广泛使用的,因为它们具有最短的波长,因此具有最高的能量。它们的波长范围为 200nm - 400nm。
- 在过去的几年中,UVC 灯已向公众开放。它们有不同的形式,包括指导用户如何有效杀死细菌的说明。
使用这些 UVC 灯,我们设计了Fluoresce机器人,这是一种自主消毒机器人,具有四个可伸缩的 UVC 灯管和内置的 SLAM 功能。
能力与创新
荧光机器人对房间和里面的家具进行消毒。它确保房间完全可以安全居住,并防止所有微生物的传播。
精心设计的电机系统允许管道向上延伸,以便在更高的高度安全地清洁桌子和其他此类物体。UVC 管还可以以特定角度倾斜,以进一步扩大范围。
在软件方面,计算机视觉算法用于检测人、宠物、植物,并识别高风险表面(即热点)。如果检测到任何生物,机器人会立即关闭,以免造成任何伤害。
如果检测到高风险表面,则使用雾化器与 UVC 管一起喷洒表面消毒剂,确保增加安全性。该机器人是完全自主的,几乎不需要人工参与。这有助于用户保持与 UVC 辐射的距离。
操作说明
- 该设备首先穿过房间寻找生物的存在,同时绘制房间地图。
- 一旦机器人可以安全地确定房间是干净的,清洁过程就会开始。
- 机器人绘制出房间并自主移动,使用它的四个 UV-C 管对房间内的墙壁、地板和物体进行消毒。管子向上延伸并旋转以清洁不同形状和大小的物体。
- 清洁过程的强度可以根据用户的要求在应用程序中改变。如果检测到人的存在或过热,机器人会自动停止。
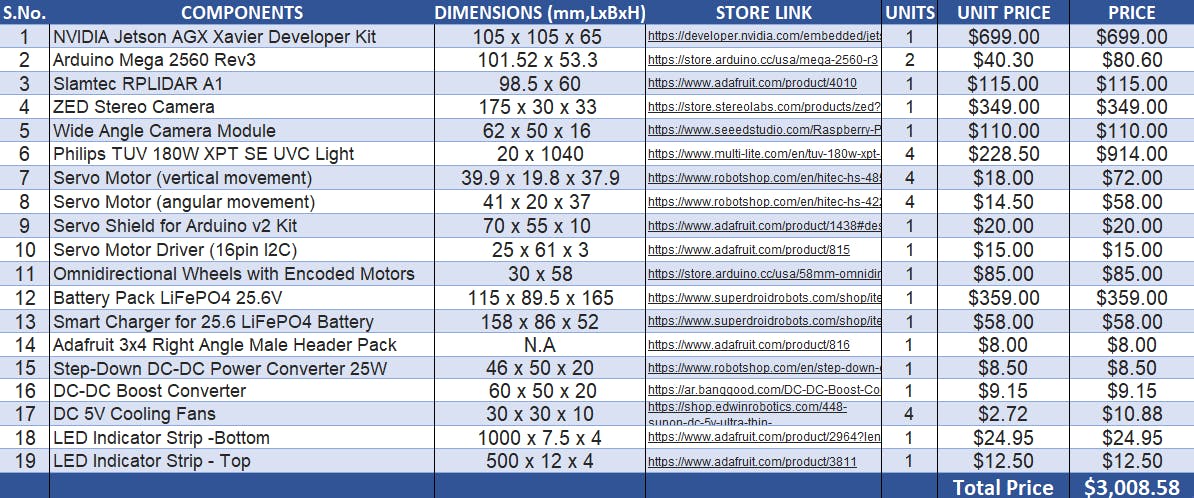
机器人设计
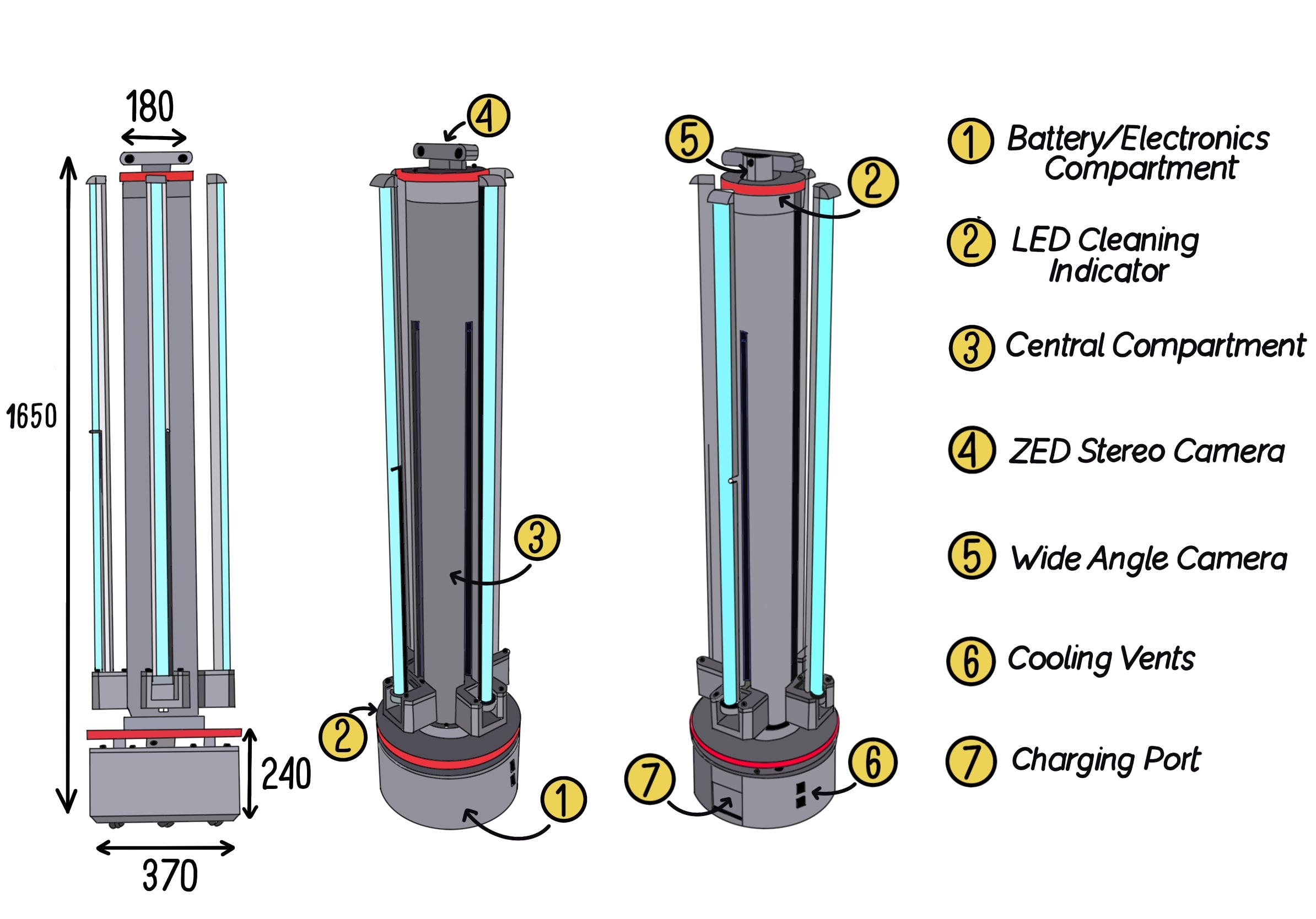
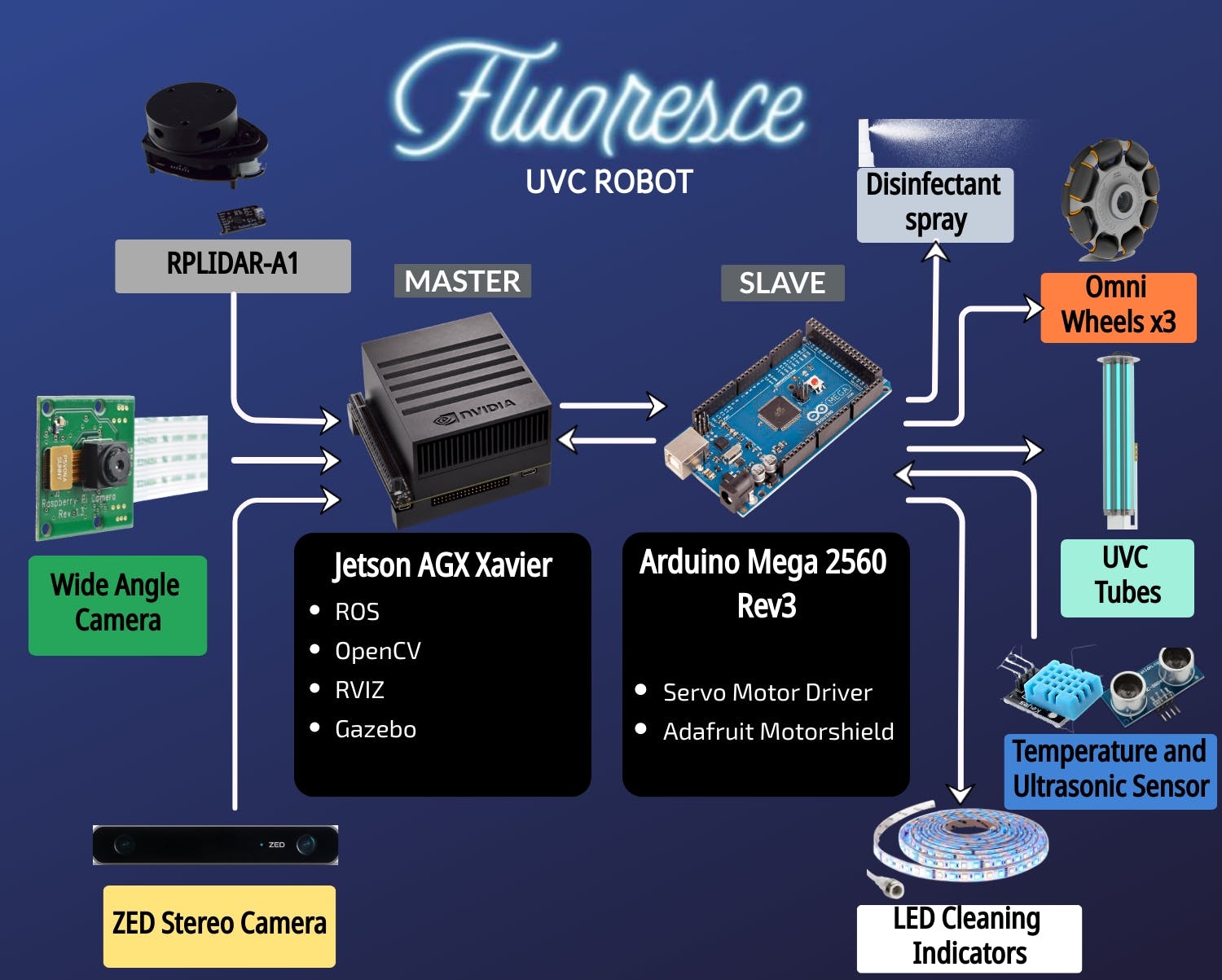
Zed 立体相机和广角相机:
这两个摄像头同时使用以提供 300 度以上的视野。
RPLIDAR-A1:
RPLIDAR-A1 传感器可进行 360 度激光扫描,以创建其所在房间的全方位地图。它具有可调节的采样率,这决定了映射过程的速度和准确性。
全向轮:
该机器人使用三个全向轮,比传统的圆柱轮提供更广泛的运动范围。这允许在狭小的空间中以更大的控制移动。
温控冷却风扇:
机器人底座包含 4 个温控风扇(2 个进气和 2 个排气),在底座过热时打开。因此,底座及其大部分组件都被主动冷却。
LED 清洁指示灯:
机器人的顶部和底部包含一个 LED 灯条,当机器人开启时变为红色,机器人关闭时变为绿色。这提醒了该地区的人们。
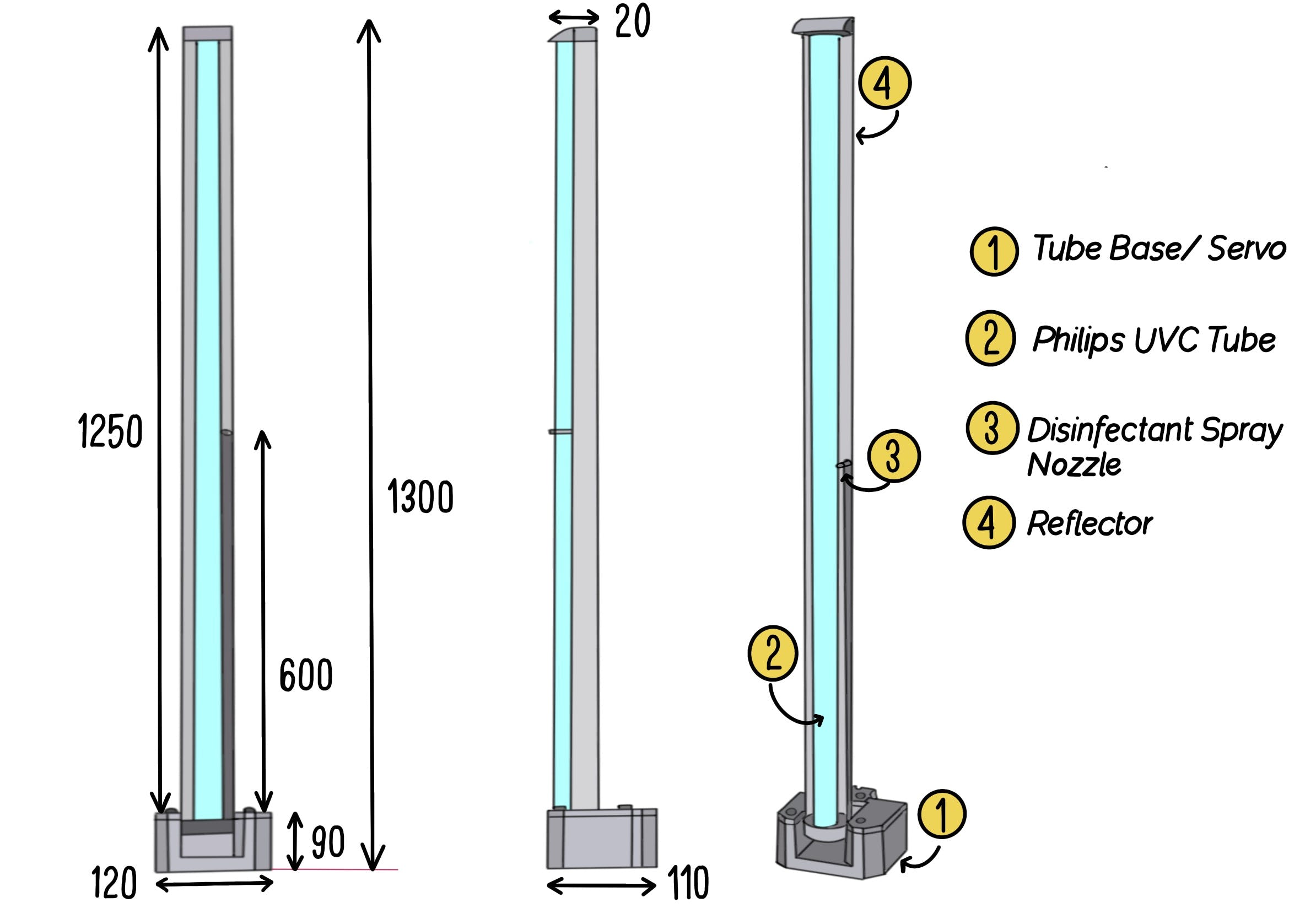
伺服电机+导轨延长管:
荧光机器人的主要特点之一是管子可以向上延伸以达到更高的高度。为了实现这一点,我们制作了一种机制,其中我们有一个伺服电机,它沿着管座上的凹槽旋转金属螺纹杆。
电机倾斜管:
在每个管子的底部,都有伺服电机,可以帮助管子倾斜到不同的角度,使其能够接触到桌面和其他此类配件。
带泵的雾化器:
连接到管的反射器的是一个雾化器,连接到一个泵,有助于在需要时喷洒消毒液。
机器人特点
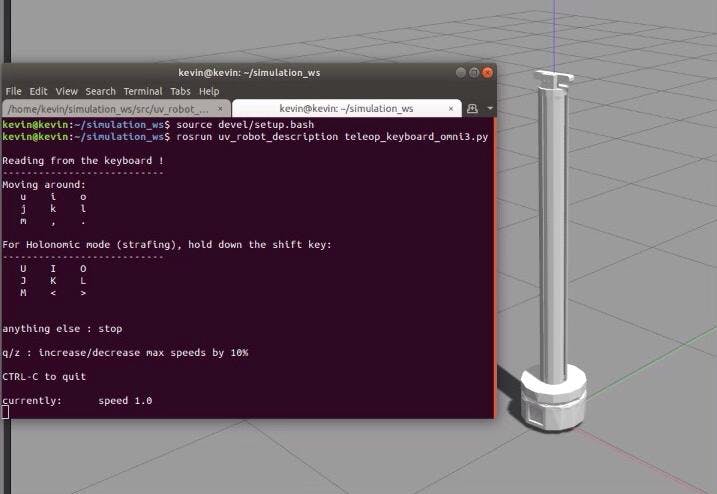
机器人遥控操作:
- 该机器人配备了与 ROS 集成的远程操作功能。
- 如果需要,这有助于远程控制机器人。
管子移动和旋转:
- 荧光机器人中的四根 UVC 管可以向上延伸,最高可达 2.45 米。
- 这允许机器人到达房间里的橱柜、抽屉、桌子、水槽、镜子、屏幕等。
- 连接到管子底部的伺服电机也允许它们旋转,从而扩大了机器人的范围,使其能够到达原本会被忽视的区域。
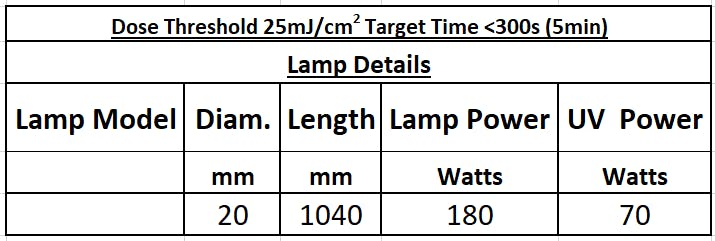
紫外线强度控制:
- 虽然完全消毒是当务之急,但我们也知道某些房间或区域可能不需要与高风险区域或“热点”相同的消毒水平。
- 因此,为了确保清洁过程的效率并优化机器人的电力使用,应用程序中内置了一些设置来控制发出的 UV-C 光的强度,因为所使用的飞利浦管包括可变的规定强度。
消毒喷雾:
- 机器人的四个手臂中的每一个都配备了一个雾化器。
- 这用于用消毒剂溶液喷洒高风险表面,确保最高级别的清洁。
- 通过使用 OpenCV 库编码的图像处理软件运行来自Zed相机的图像来检测热点(厕所、门把手等) 。
自动映射房间:
- 我们已将 SLAM 算法包含在与 RPLIDAR-A1 传感器配合使用的软件包中,以便在设备开始清洁之前完整地映射房间。
- 创建的地图有助于机器人避开障碍物并生成对房间进行消毒的最佳路径。
多房间支持:
- 在应用程序中,我们为用户添加了映射多个房间并为每个房间存储单独地图的功能。
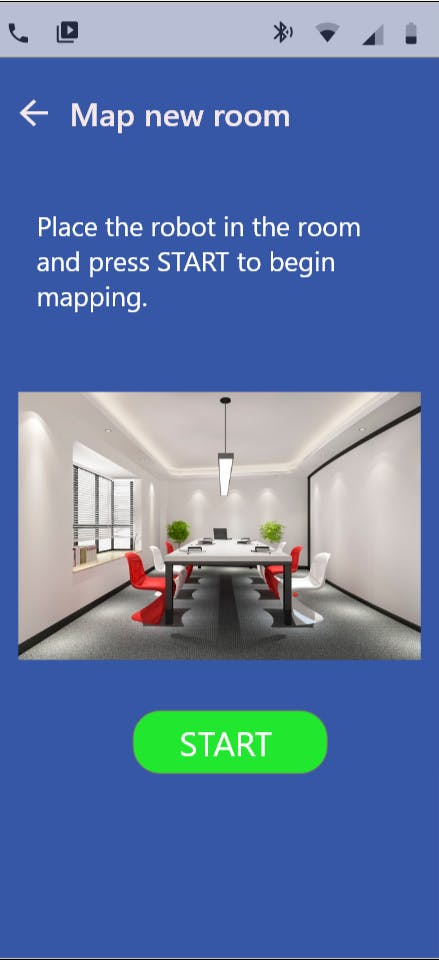
- 用户选择要消毒的房间,机器人会自动按照之前创建的地图绘制的路径。
自主码头充电:
- 一旦 Fluoresce 机器人完成房间的消毒或电量不足,它会自动前往充电座进行充电。
导航和引导平台
我们在 ROS Melodic 上使用 Gazebo 来模拟正在使用的 RPLIDAR 传感器的工作。传感器覆盖的区域被分成了4个区域,分别是左、前左、前右和右。每一个都被赋予了一系列角度。在这些范围中的任何一个范围内检测到障碍物都会触发机器人自动转向相反的方向,从而避免碰撞。除此之外,我们还结合了 Bug1 算法来有效地到达我们的目的地,这也有助于用于创建地图的 Gmapping 工具。
安全特性
除了它们所拥有的好处外,紫外线还与皮肤癌和白内障等多种疾病有关,从而对健康造成危害。因此,在进行卫生处理时,不允许人类进入房间。
虽然科学家们发现了一个从 207nm 到 222nm 的窄光谱,它可以在射线不穿透人体皮肤最外层的情况下杀死病原体,但将辐射调节到如此精确的量是不可行的,这就是为什么某些安全功能具有已到位。这些包括:-
自动人员检测:
- Fluoresce 机器人在确定房间内没有人之前不会开始清洁过程。人员检测是连续进行的。
- 当机器人在房间里移动时,它会通过人员检测算法运行来自摄像机的实时信息,以确保没有任何人受到这些有害辐射的影响。一旦检测到人,它就会完全关闭。
宠物和植物检测:
- 还有一个程序正在运行,以检查是否存在受辐射影响的宠物和植物。
- 如果发现其中任何一个,机器人将完全关闭。
清洁警告系统:
- 该机器人在顶部和底部配备了 LED 指示灯,可在机器人使用时提醒该区域的居民。
- 当机器人在使用时,条带会变成红色,以警告人们尽可能远离并保护自己免受 UVC 辐射。
- 机器人关闭或停靠到充电端口后,指示灯将变为绿色,表明它的存在是安全的。

温度监测系统:
- Fluoresce 机器人内置有温度传感器,可不断监测内部组件的热量水平。
- 温度数据可以在应用程序上查看,如果出现任何过热情况,设备会自动关闭,以免对周围环境造成任何伤害。
荧光机器人应用程序
该机器人带有一个应用程序,有助于充分利用其功能。它具有增强用户体验的各种功能和指标。
商业模式
- 荧光机器人适用于订阅模式。用户/组织订阅 3 个月、12 个月或 24 个月的计划,费率会相应变化。
- 订阅包括对公司自身提供的设备的定期维护和服务。
- 这将允许消费者根据他们的要求选择一个计划,并充分利用机器人的功能。
我们要感谢美光和 Hackster 团队为我们提供了在这个项目上合作的机会,这对我们所有人来说都是一次很棒的学习经历,肯定会在我们未来的努力中帮助我们。
- 电晕消毒紫外线机器人开源分享
- 消毒机器人Hanth-x1开源分享
- 使用UVC和垃圾场材料的自主消毒机器人
- Pinaka:UVD(紫外线消毒)机器人开源分享
- LIDIA光消毒机开源分享
- UV-C消毒机器人开源分享
- 全自动UV-C消毒机器人开源分享
- 紫外线消毒机器人
- 消毒机器人开源项目
- Roboboi智能紫外线消毒机器人
- Amabie消毒机器人开源分享
- 低成本机器人消毒系统开源分享
- 紫外线灯消毒机器人开源分享
- 自动地板消毒机器人
- 瞳步消毒机器人方案
- 字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能 360次阅读
- 机器人威廉希尔官方网站 中常用的路径规划算法的开源库 843次阅读
- 如何使用DonkeyCar平台构建一个自主机器人 2114次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- dfrobotSparki机器人套装简介 2064次阅读
- 机器人拥有自主意识到底是是不是有益你会担心吗 4247次阅读
- 一文看懂服务机器人发展前景 2519次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop 6069次阅读
- 关于机器人传感器的种类介绍 1.3w次阅读
- 软体机器人 前所未见的机器人 3692次阅读
- 机器人自主充电座PCB图和自主充电原理图 9092次阅读
- 自主移动机器人的定位与地图创建(SLAM)关键性问题 1906次阅读
- 机器人自主移动的秘密,从SLAM威廉希尔官方网站 说起 2368次阅读
- 机器人最实用的10种传感器盘点 1.3w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论