 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
线跟随器的概念
线跟随器的工作概念与光有关。我们在这里使用光在黑白表面上的行为。当光落在白色表面时,它几乎被完全反射,而在黑色表面的情况下,光被完全吸收。光的这种行为用于构建线跟随机器人。
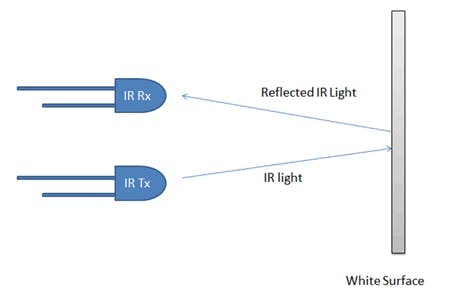
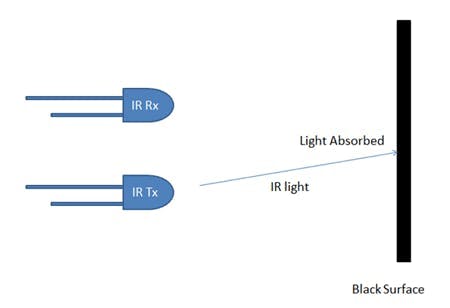
在这个基于Pi Pico 的线跟随机器人中,我们使用了红外发射器和红外接收器,也称为光电二极管。它们用于发送和接收光。IR 传输红外光。当红外线落在白色表面上时,它会被反射回来并被光电二极管捕获,从而产生一些电压变化。当红外光落在黑色表面时,光线被黑色表面吸收,没有光线反射回来,因此光电二极管不接收任何光线或光线。
在这个 Pi Pico 线跟随机器人中,当传感器感应到白色表面时,Pi Pico 得到 1 作为输入,当感应到黑线 Pi Pico 得到 0 作为输入。
电路说明
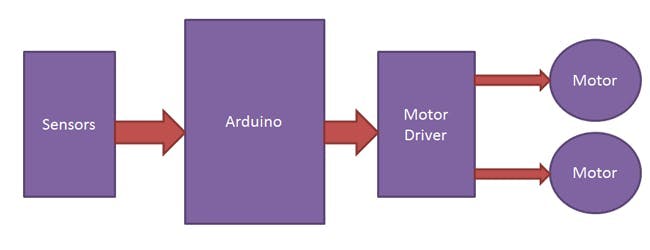
整个PiPico 线跟随机器人可分为 3 个部分:传感器部分、控制部分和驱动部分。
传感器部分:
本部分包含 IR 二极管、电位器、比较器(运算放大器)和 LED。电位器用于设置比较器一端的参考电压,IR 传感器用于检测线路并在比较器的第二端提供电压变化。然后比较器比较两个电压并在输出端生成数字信号。在此线路跟随器电路中,我们为两个传感器使用了两个比较器。LM 358 用作比较器。LM358 内置两个低噪声运算放大器。
使用 Pi Pico 工作线跟随机器人
线跟随者的工作非常有趣。线跟随机器人通过传感器感知黑线,然后将信号发送给 Pico。然后 pico 根据传感器的输出驱动电机。
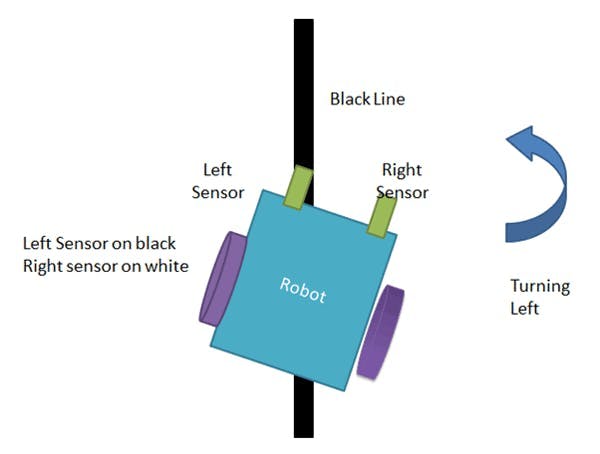
在这个项目中,我们使用了两个红外传感器模块,即左传感器和右传感器。当左右传感器都感应到白色时,机器人就会向前移动。
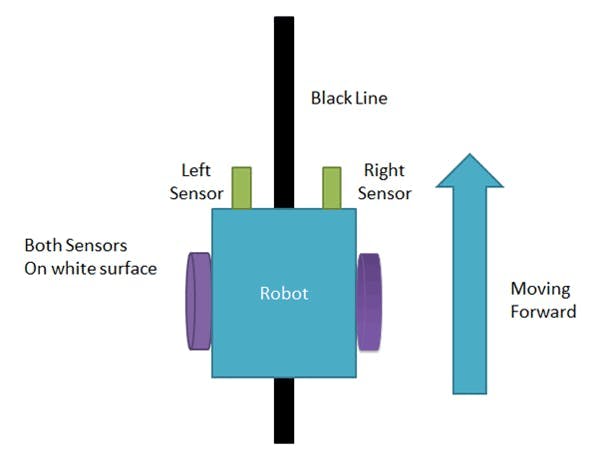
如果左侧传感器出现在黑线上,则机器人向左转。
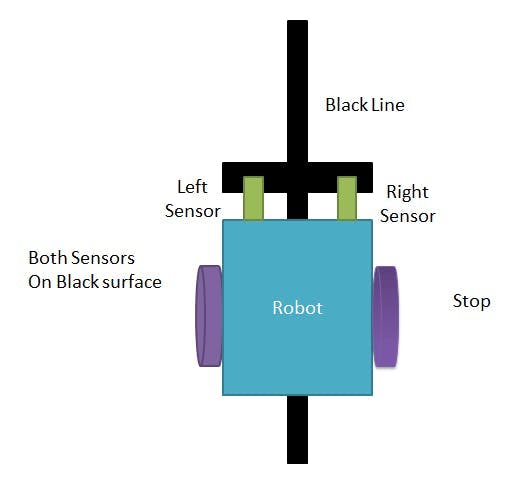
如果右侧传感器感应到黑线,则机器人向右转,直到两个传感器都到达白色表面。当白色表面出现时,机器人再次开始向前移动。
如果两个传感器都在黑线上,则机器人停止。
电路
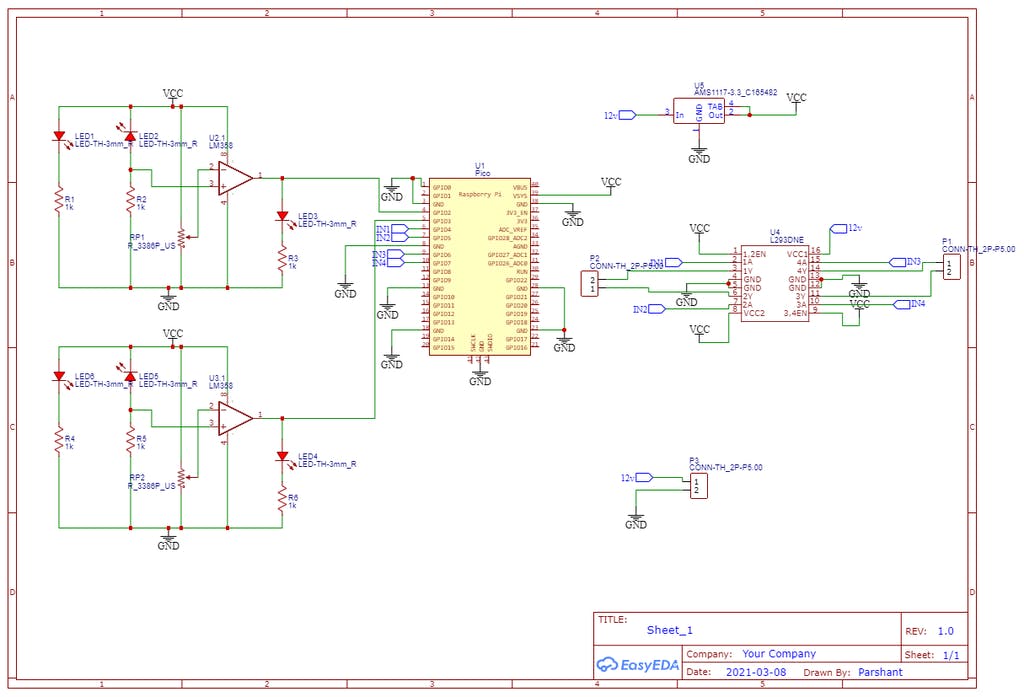
这是 LFR 的电路。
我们使用新的微控制器 Raspberry Pi Pico Board 设计了一个线跟随机器人。
PCB有3个部分
1. 第一个是红外传感器部分
2. 第二个是电机驱动部分
3.最后一段是pico段
IR 传感器部分是使用 lm358 运算放大器、成对的 IR 发射器和 IR 接收器、一个电位器和一些电阻设计的。
这种红外传感器可用于确定白色和黑色之间的差异。
红外发射器在表面上投射光,红外接收器接收它。
在黑色的情况下,发射器发出的红外线被吸收。所以输出保持为零
在白色的情况下,红外线被接收器反射和接收。所以我们得到了高输出。
来到电机驱动部分
电机驱动器部分包括 L293D 电机驱动器 ic 以及用于电机和电池的连接器。L293D 基于 H 桥。如果您想获得有关电机驱动器的更多信息。我在描述中给出了一个链接,您可以查看它。
树莓派部分包括树莓派和一个 3.3v 电压调节器。Pi 在 3.3v 上工作,所以我们使用了稳压器 AMS1117。
订购 PCB
让我们从JLCPCB.com 订购 PCB。前往制造并获取 PCB 制造文件,然后在 JLCPCB 上单击订单。JLCPCB订单页面将打开。
验证尺寸并选择 PCB 数量。选择表面处理并单击添加到购物车。现在让我们检查一下,填写您的详细信息,然后使用 PayPal 付款。
1-4 层 PCB 2 美元,注册获得 18 美元新用户优惠券:https ://jlcpcb.com/IYB
有趣的事实 JLCPCB 拥有超过 10 年的 PCB 制造经验,拥有超过 200,000 名客户,每天有超过 8,000 份 PCB 原型制作和小批量 PCB 生产的在线订单。
一周后我得到了多氯联苯。哑光黑色看起来很棒。
编码
让我们打开 VS Code。
要对 pico 进行编程,您需要在 vs 代码中安装 PICO-go 扩展。有关更多信息,请观看我的 pico 教程系列,请单击此处
它工作得很好。
LFR 遵循黑线。我对其进行了编程,使其在两个传感器都接触黑色时停止工作。所以在纸的这一面,它在每个路口都停了下来。
- 使用OpenCV的车道跟随机器人
- DIY简单的线跟随机器人
- 基于树莓派pico的线跟随机器人设计 0次下载
- 基于Arduino Nano的PID线路跟随机器人 2次下载
- 基于PID的线跟随机器人
- 线跟随机器人开源硬件
- 使用TI RSLK MAX构建声音跟随机器人
- PID控制线跟随机器人
- 人类跟随机器人v2.0开源分享
- 带有PID控制的线跟随机器人
- 最简单的线跟随机器人
- 物体跟随机器人开源分享
- 如何使用Arduino制作跟随机器人
- 人类跟随机器人开源分享
- 线跟随机器人开源项目
- 巡线机器人电路图 巡线机器人的工作原理和应用领域 545次阅读
- 新松协作机器人智能工厂 1139次阅读
- 一个简单的线路跟随器机器人电路 1812次阅读
- 基于ATmega16构建的线跟随机器人的完整电路图 1789次阅读
- 基于使用Arduino板及电机驱动器对机器人进行编程介绍 3660次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- 医用机器人的定义_医用机器人发展 3122次阅读
- 智能跟随系统应用领域和功能介绍 5317次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 如何区分机器人、协作机器人和移动机器人? 6828次阅读
- 工业机器人结构、驱动及威廉希尔官方网站 指标详解 3051次阅读
- 基于PLC的机器人伺服运动控制系统设计详解 1.5w次阅读
- 软体机器人 前所未见的机器人 3692次阅读
- 机器人的最佳编程语言是什么?机器人十大流行编程语言汇总 3.4w次阅读
- 智能机器人的三大关键威廉希尔官方网站 详解 3.2w次阅读

下载排行
本周
- 1使用单片机实现七人表决器的程序和仿真资料免费下载
- 2.96 MB | 44次下载 | 免费
- 2Keysight B1500A 半导体器件分析仪用户手册、说明书 (中文)
- 19.00 MB | 4次下载 | 免费
- 3BT134双向可控硅手册
- 1.74 MB | 2次下载 | 1 积分
- 4一种新型高效率的服务器电源系统
- 0.85 MB | 1次下载 | 1 积分
- 5PR735,使用UCC28060的600W交错式PFC转换器
- 540.03KB | 1次下载 | 免费
- 6WTS-100(1.1) UWB 信标定位系统 彩页
- 540.48 KB | 1次下载 | 免费
- 7DV2004S1/ES1/HS1快速充电开发系统
- 2.08MB | 1次下载 | 免费
- 8MATLAB绘图合集
- 27.12 MB | 1次下载 | 5 积分
本月
- 1使用单片机实现七人表决器的程序和仿真资料免费下载
- 2.96 MB | 44次下载 | 免费
- 2UC3842/3/4/5电源管理芯片中文手册
- 1.75 MB | 15次下载 | 免费
- 3DMT0660数字万用表产品说明书
- 0.70 MB | 13次下载 | 免费
- 4ST7789V2单芯片控制器/驱动器英文手册
- 3.07 MB | 11次下载 | 1 积分
- 5TPS54202H降压转换器评估模块用户指南
- 1.02MB | 8次下载 | 免费
- 6STM32F101x8/STM32F101xB手册
- 1.69 MB | 8次下载 | 1 积分
- 7TPS92682-Q1帧定义和示例
- 891.71KB | 6次下载 | 免费
- 8HY12P65/HY12P66数字万用表芯片规格书
- 0.69 MB | 6次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935119次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420061次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233084次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191367次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183335次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81581次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73807次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65987次下载 | 10 积分





 工商网监
工商网监
评论