 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
介绍
Avnet SmartEdge Agile 设备是一种自给自足的智能设备,可以通过连接到方向盘或烘干机轻松收集数据。该系统是一个多合一的传感器收集器和简单的机器学习模型执行堆栈。
在这里,我们展示了两个简单的应用程序,并展示了通过使用 Velcro 剥离和粘贴设备来从一个应用程序跳转到下一个应用程序是多么容易。
在家中的两个青少年对驾驶监控产生了极大的兴趣。它对于审查包裹公司、杂货配送服务、共享驾驶公司、出租车、鲁莽司机、路怒司机和疯狂司机的司机表现也很重要。
反复攻击的司机会在他们的方向盘上安装这些设备之一,并监控他们的驾驶活动,以防止进一步的违规行为。
我们在之前的项目中找到了动机:“ GPS Drivers Log ”,它记录了设备的 GPS 位置和速度,但不记录驾驶监控技能或环境条件。Avnet SmartEdge Agile 用作强大的传感器数据收集器,可提供驾驶员驾驶条件和技能的概况。
材料
我们使用 Avnet SmartEdge Agile 设备。对,就是那样。不需要其他硬件。

资源
在 gpearston 撰写的“ Brainium /SMARTEDGE AGILE-Review ”中可以找到关于 Avanet SmartEdge Agile 设备的非常好的评论。还有 Krishnaraj Varma 的评论标题“ SmartEdge Agile 和 Brainium 简介” 。
Brainium Dashboard 登录在此处,文档在此处。
jupyter notebook 水平排列绘图功能可以在这里找到。
Jupyter notebook 动态图交互说明可以看这里。
这次我们没有使用有趣的信息。RPi 有一个网关,你可以在这里找到安装说明,PDF 可以在这里下载。
行车监视器
可用于创建驾驶配置文件的指标是陀螺仪、世界加速度和接近度。定义车厢环境的指标是声音、温度和光线。
接下来是每个指标的简短描述。
陀螺仪或角速度显示我们驾驶的速度。其中包括避免事故或突然改变车道等情况。
世界加速或正常加速可能显示可能的街头赛车或突然减速。
嘈杂的音乐或乘客聊天的声音可能会让司机分心。新司机倾向于打开立体声音乐,可能会忘记周围的交通状况或可能的警告/危险交通声音队列。
光照条件因农村或城市行驶道路而异。
温度控制是一个有趣的节能领域。该设备使我们能够看到自动洞穴内的温度设置。
湿度和压力取决于所行驶的道路。看看地质景观如何改变压力条件并因此改变发动机性能真的很有趣。取决于所行驶的道路。看看地质景观如何改变压力条件并因此改变发动机性能真的很有趣。
数据收集是通过清晨从早上 5:00 开始,距离 100 英里和大约 1:45 小时以及下午从下午 3:30 开始在高峰时段通勤、100 英里和大约 2:30 小时开始的。是的,很多数据。
数据是通过每隔近一个小时运行记录功能来收集的,早上通勤时提供两个文件,下午通勤时提供三个文件。例如第一个文件有这么多数据
GYROSCOPE_NORM 14119
WORLD_ACCELERATION_NORM 8824
ACCELERATION_NORM 8824
MAGNETIC_FIELD_NORM 8298
SOUND_LEVEL 3525
PRESSURE 3319
PROXIMITY 3319
VISIBLE_SPECTRUM_LIGHTNESS 3319
HUMIDITY_TEMPERATURE 3319
IR_SPECTRUM_LIGHTNESS 3319
HUMIDITY 3319
Name: dataSource, dtype: int64
该文件在大约 45 分钟的记录中记录的数据总数为 63504 个点,这占用了大约 4.3 Mb 的空间。
使用 Jupyter Notebook 分析数据
我们使用 Jupyter Notebook 来分析 Avnet SmartEdge Agile 设备记录的数据。收到的文件格式如下:
devicePublicId,dataSource,timestamp,scalar,vector
D1,GYROSCOPE_NORM,1566508292002,0.6946869492530823,
D1,GYROSCOPE_NORM,1566508292236,0.915907621383667,
D1,GYROSCOPE_NORM,1566508292471,0.39298704266548157,
D1,GYROSCOPE_NORM,1566508292783,2.0969412326812744,
D1,GYROSCOPE_NORM,1566508293017,0.35836511850357056,
D1,GYROSCOPE_NORM,1566508293251,0.5771657228469849,
D1,GYROSCOPE_NORM,1566508293485,1.3782867193222046,
D1,GYROSCOPE_NORM,1566508293797,1.8784273862838745,
D1,HUMIDITY,1566508292060,39,
D1,HUMIDITY,1566508293138,40,
D1,IR_SPECTRUM_LIGHTNESS,1566508292085,201,
D1,IR_SPECTRUM_LIGHTNESS,1566508293164,192,
D1,MAGNETIC_FIELD_NORM,1566508291973,57.30019760131836,
D1,MAGNETIC_FIELD_NORM,1566508292401,56.88837814331055,
D1,MAGNETIC_FIELD_NORM,1566508292834,54.180320739746094,
D1,MAGNETIC_FIELD_NORM,1566508293264,56.206783294677734,
D1,MAGNETIC_FIELD_NORM,1566508293698,54.03041076660156,
D1,ACCELERATION_NORM,1566508291924,9.627486228942871,
D1,ACCELERATION_NORM,1566508292315,9.70956802368164,
标头显示文件内容为 deviceId、数据源(正在报告的传感器)、时间戳(以毫秒为单位)、标量(传感器值)和向量(当前未使用)。
要找出正确的格式,时间戳有点复杂。该值不是以秒为单位,而是以毫秒为单位。在 Jupyter 笔记本中,您将执行如下操作,其中 pd 是 pandas 包。
pd.Timestamp(timeStampVariableHere, unit='ms', tz='US/Eastern')
我们需要在 Jupyter Notebook 中安装以下库:pandas、matplotlib、io、base64、IPython 和 ipywidgets。使用的笔记本的示例会话附加到项目的程序文件部分。
import ipywidgets as widgets
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import io
import base64
from IPython.display import display
from IPython.display import HTML
from ipywidgets import *
我们首先使用 pandas 加载数据
df1_1=pd.read_csv("DataPATH\\recording_session_5d5e5a275ba70e00014f9048.csv")
data_counts1_1 = df1_1['dataSource'].value_counts()
print (data_counts1_1)
打印显示每个传感器记录的数据点数,如下所示
GYROSCOPE_NORM 14119
WORLD_ACCELERATION_NORM 8824
ACCELERATION_NORM 8824
MAGNETIC_FIELD_NORM 8298
SOUND_LEVEL 3525
PRESSURE 3319
PROXIMITY 3319
VISIBLE_SPECTRUM_LIGHTNESS 3319
HUMIDITY_TEMPERATURE 3319
IR_SPECTRUM_LIGHTNESS 3319
HUMIDITY 3319
Name: dataSource, dtype: int64
以下函数使用 label 参数过滤数据,如下例所示。将标签设置为 SOUND_LEVEL 调用 prepareData 函数,数据范围为点 500 到点 800。Pandas 通过 dataSource 列过滤数据并选择数据范围。
def getRangeData(data, columnLabel, dmin = 0,dmax = 0):
if (dmin == 0 and dmax == 0):
retdata = data[[columnLabel]]
elif (dmin == 0):
retdata = data[[columnLabel]][:dmax]
elif (dmax == 0):
retdata = data[[columnLabel]][dmin:]
else:
retdata = data[[columnLabel]][dmin:dmax]
return retdata
def prepareData(label,dmin = 0,dmax = 0):
global df1_1
global data1_1
global sdata1_1
sdata1_1 = df1_1[df1_1['dataSource'] == label]
data1_1 = getRangeData(sdata1_1,'scalar',dmin,dmax)
label ='SOUND_LEVEL'
prepareData(label,500,800)
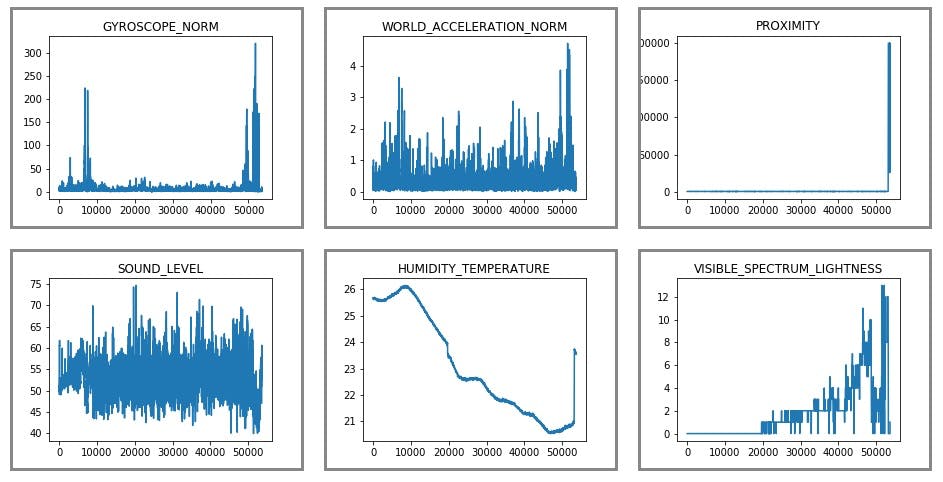
下面是一组图表,描述了我们早上开车第一个小时的驾驶概况。
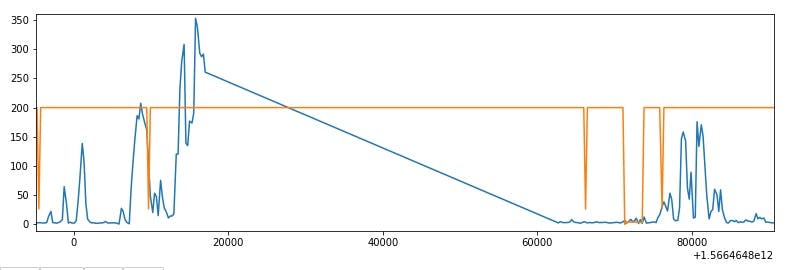
您会注意到 Gyroscope_Norm 在开始和结束时显示了一些峰值,这些峰值表示城市驾驶有硬转和软转;接近 0 的部分描绘了高速公路行驶,几乎没有变道,几乎没有转向。
还要注意环境指标:温度、声音和可见光。声源是广播新闻,平均分贝为 55 分贝。机舱温度逐渐降至舒适的 22 摄氏度,室外温度为 26 摄氏度(炎热的早晨)。终于,清晨通勤,没有出现日出,光线感应器接近黑暗。
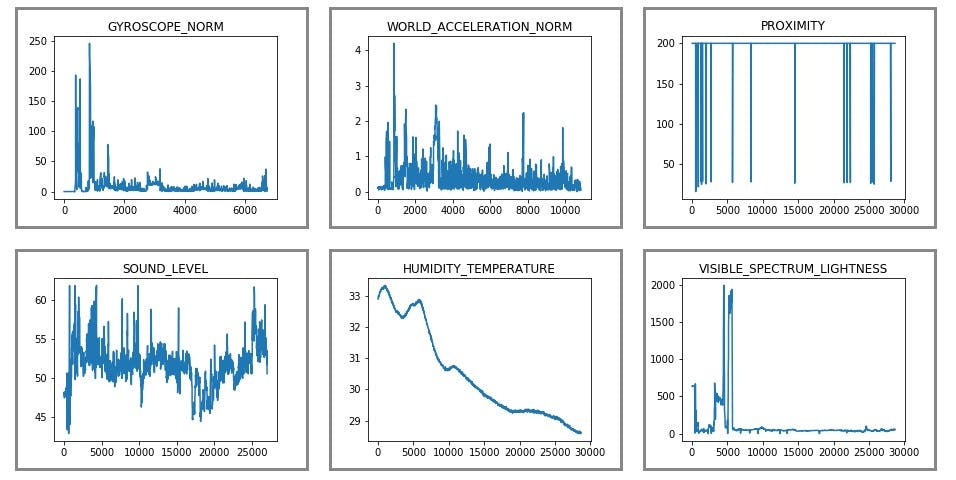
下午的通勤时间也差不多,开始是市区行驶,高速公路上稳定行驶。接近传感器证实了很少的硬转弯。
噪音水平也设置为标准对话和新闻广播。温度需要一段时间才能降低到 29 摄氏度。光照显示显着增加至平均 800 度,在阳光明媚的开始和之后的云层中达到峰值。
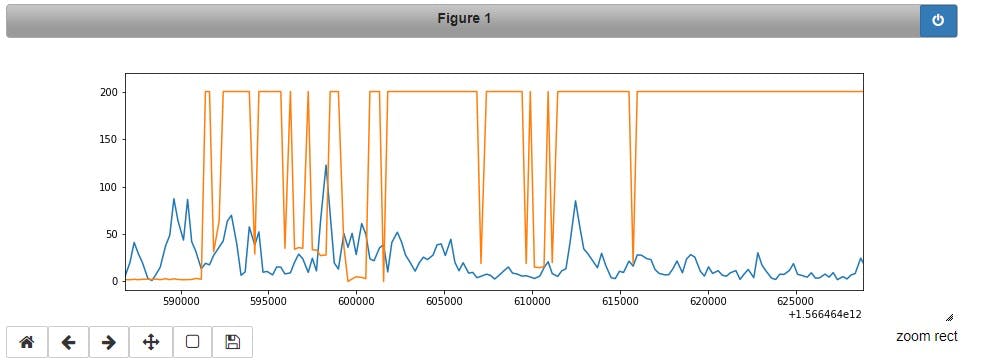
仔细查看要绘制的点数较少的图。这是我离开车道并开始穿过社区街道后的示例。请注意,接近传感器上接近 2.5 厘米的较低峰值与陀螺仪上的变化相匹配,这在这些情况下表明是一个硬转弯。
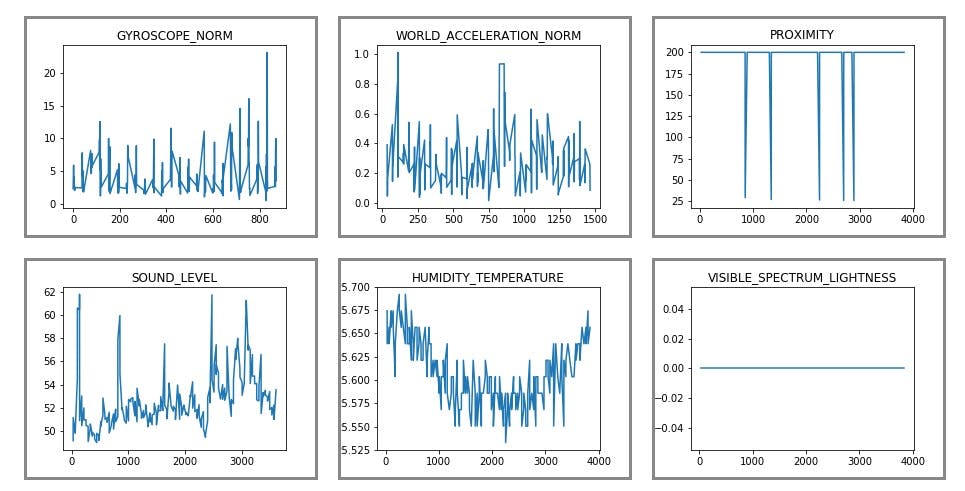
下午通勤的情况也是如此,从工作的车库里出来。
这是一个关于陀螺仪指标和接近传感器如何一起显示方向盘硬转的小动画。接近传感器在转动方向盘时改变值并与信号知道或光杆对齐。在这一点上,我们知道方向盘已经改变了至少 90 度,这意味着一个急转弯。
陀螺仪上的值越高,转弯越剧烈。
此图同时显示 Gyroscope_Norm(蓝色)和 Proximity(橙色)传感器值。当接近传感器碰到灯或雨刷杆时,请注意软转向开始,然后转向超过 90 度。
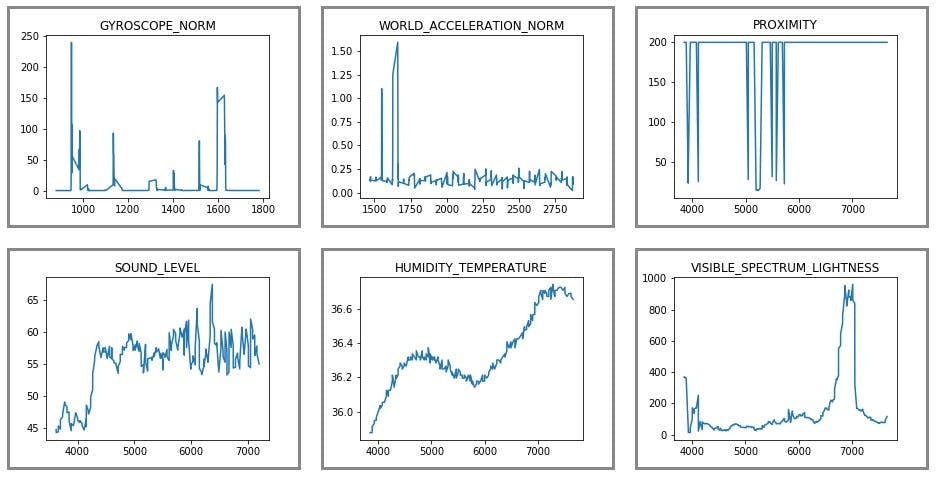
下面是另一个示例,但这次注意到陀螺仪值的变化更快,这表明急转弯(方向盘的快速运动),以及接近传感器的变化更突然。
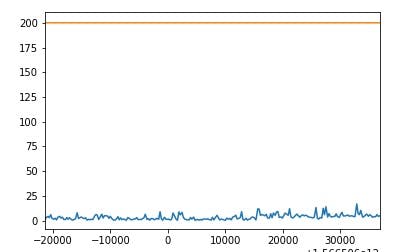
最后,下图显示,当没有转动时,接近传感器仍然指向中心面板,并且陀螺仪上没有记录到剧烈变化。这显示了高速公路驾驶。
请记住,所有这些图表都是使用 Jupyter Notebook 界面中的 matplotlib 绘制的。
驾驶应用
驾驶应用程序正在开发中,并将向相关方(父母、警察、消防部门等)通知危险驾驶。SmartEdge 设备将推断驾驶员行为可能出现的危险情况,并提醒驾驶员和上述各方。
我的衣服准备好了吗?
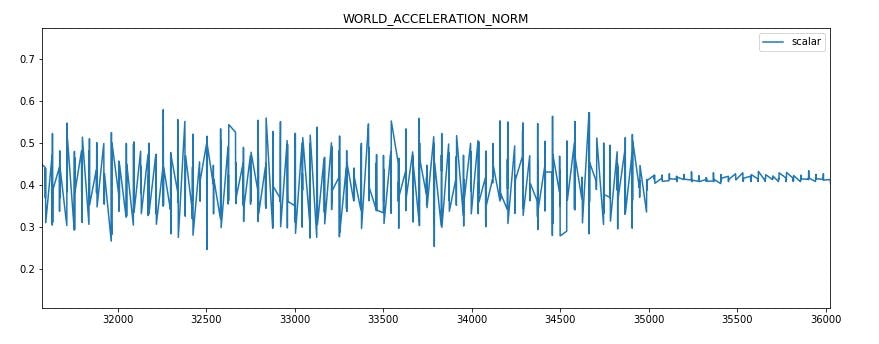
最后,正因为我们可以,而且预览直播数据是如此容易。我们将 AVNET SmartEdge Agile 设备连接到我们的旧烘干机并运行旋转循环。从下图中可以看出
结论
分析来自方向盘和烘干机的数据只是 Avnet SmartEdge Agile Brainum 应用无限可能的第一步。通过可以收集的数据,包括接近度、加速度、角速度、光和声音,我们可以利用这些信息将其应用于现实世界并进行研究,以使汽车更安全,让日常机器更方便使用。
如果可以公开更多指标(例如 ROTATION 和 MOTION),这也将非常有用,我们无法订阅这些指标。
最后,人工智能模型的创建留给使用特定指标来推断已定义规则,如果我们能够决定使用哪些指标进行训练,以及在原始数据上找到模式的分析工具,这将是一个巨大的帮助。
谢谢阅读。
- 使用Arduino Uno和SmartEdge Agile实现家庭自动化
- 使用AVNET的SmartEdge Agile设备功能的Fridge Maid
- 电子纸巴士时刻表智能设备开源设计
- 智能设备开源项目
- SmartEdge Agile通过板上的Gero Accel传感器记录运动动作
- 如何使用AVNET Azure Sphere套件
- SWED癫痫症智能可穿戴设备开源分享
- 智能设备控制器开源分享
- 智能家居控制系统方案开源资料
- 开源网络协议分析器WireShark软件下载 15次下载
- 开源课程行动倡议及科学导论综述 6次下载
- AD9361S-CSL: RF Agile Transceiver Data Sheet
- WIFI智能开源电热水器的原理图和源代码免费下载 46次下载
- 如何使用物联网操作系统Zephyr实现“连续集成”开源软件的详细说明
- Avnet 物联网安全性的重要和方案 16次下载
- 开关控制器在智能设备中的应用 258次阅读
- 【AWTK开源智能串口屏方案】方案介绍和工作原理 742次阅读
- 前沿开源威廉希尔官方网站 领域的开源大数据一一解读 1005次阅读
- 源创通信BPI-R1 开源智能路由器介绍 2161次阅读
- 详解Avnet公司的MicroZed开发板,主要用在云端 3834次阅读
- 更小更智能的电机控制器推进HEV/EV市场 1105次阅读
- NASA的开源软件是什么?NASA的开源软件的详细分析 7186次阅读
- 亚马逊推出基于Zigbee无线威廉希尔官方网站 的语音服务设备 可服务千万计智能家居设备 5330次阅读
- 中国人工智能开源软件前生今生到底如何? 5563次阅读
- 智能家居:怎么让智能设备超低功耗运转? 1723次阅读
- 一文详解Avnet Zynq 7Z007SMiniZed开发方案 9594次阅读
- 5个顶级的人工智能开源工具 6100次阅读
- 开发者不可错过的开源项目—人工智能篇 6184次阅读
- 智能穿戴设备有哪些_智能穿戴产品品牌排行 5.1w次阅读
- 复古手环:用开源硬件打造你自己的可穿戴设备 1.1w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论