 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
描述
理念
构建过程
第 1 步:组装硬件
收集上面零件列表中列出的所有组件。
首先将 L293D H 桥放在面包板上,然后将 Builder Base 的 GND 和 5V 端口连接到面包板上的 GND 和 VCC 导轨。
现在,我们将 H 桥上的四个 GND 引脚连接到面包板上的 GND 轨,并将 H 桥上的 Vcc1 和 Vcc2 引脚连接到面包板上的电源轨。
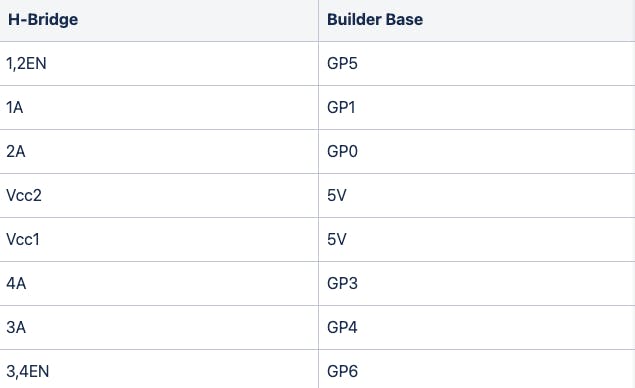
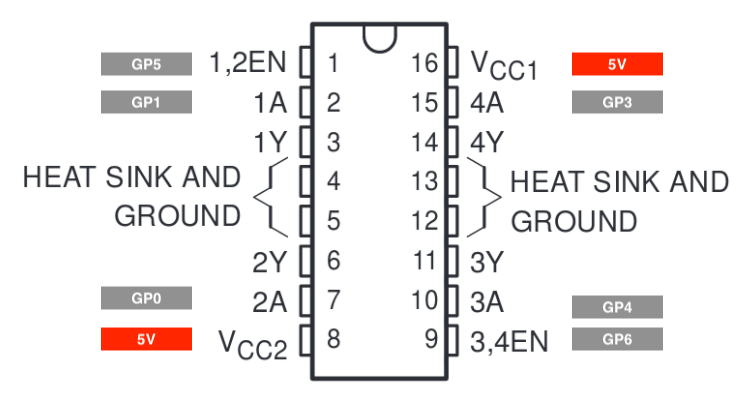
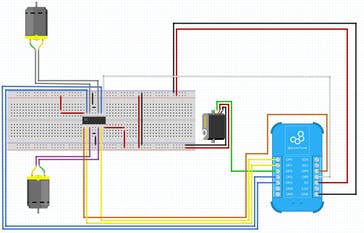
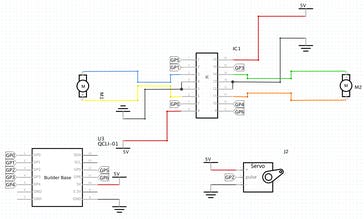
现在,在 H-Bridge 和 Builder Base 之间建立连接,如下图和表格所示:
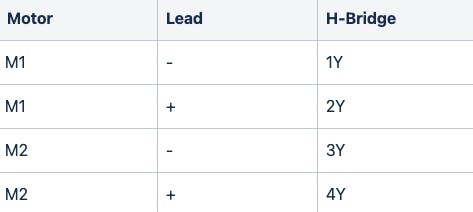
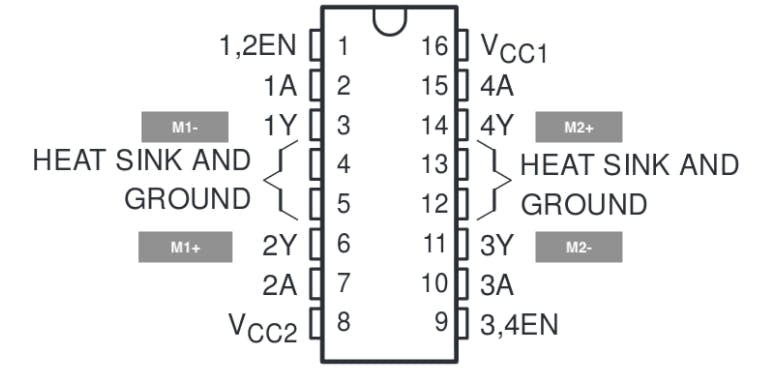
我们现在将电机连接到 H 桥,如下所示:
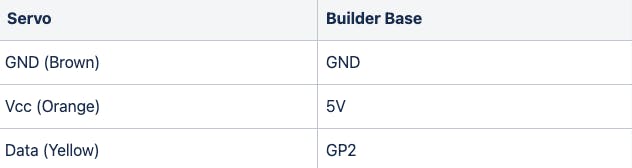
最后,我们将伺服连接到 Builder Base。
在大多数 9G 伺服器上,GND 引线是棕色的,Vcc 引线是橙色的,黄色引线是数据,但在继续之前请务必检查特定伺服器的数据表。
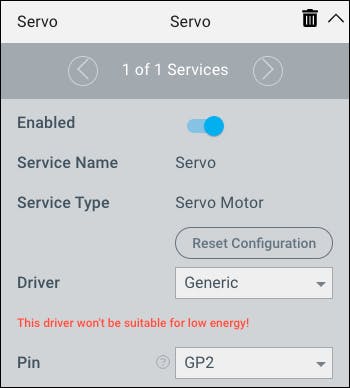
首先从伺服器中取出 GND 和 Vcc 引线,并将它们连接到面包板上的 GND 和 Vcc 导轨。最后,将数据引脚连接到构建器底座上的 GP2 端口。这是一个列出连接的表:
恭喜,该项目的硬件组装完成!
第 2 步:构建固件
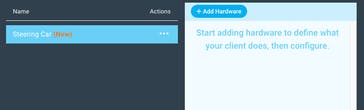
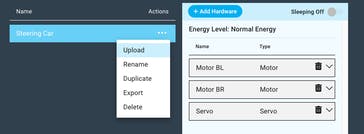
导航到固件生成器并创建一个新的固件文件。我们将其命名为转向车。

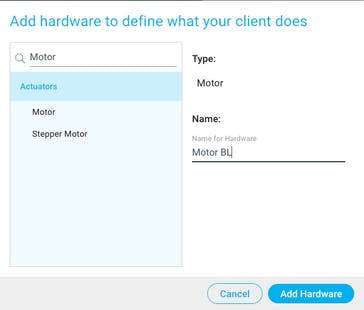
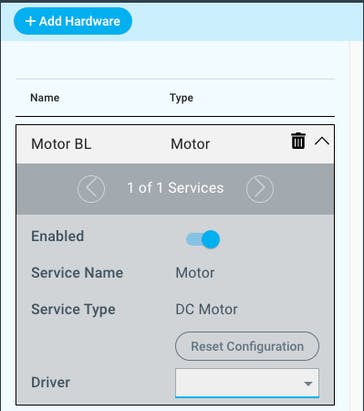
接下来,单击“+添加硬件”按钮,通过搜索栏找到电机设备,选择它,命名,然后单击“添加硬件”。我们将其命名为 Motor BL。
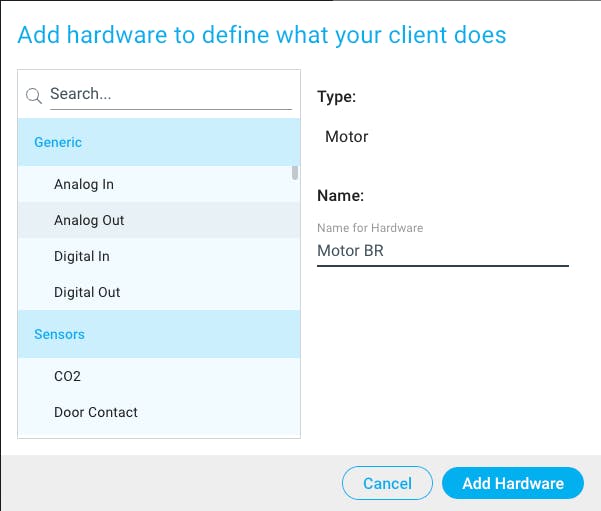
再次重复这些步骤,但这次将电机命名为:Motor BR。
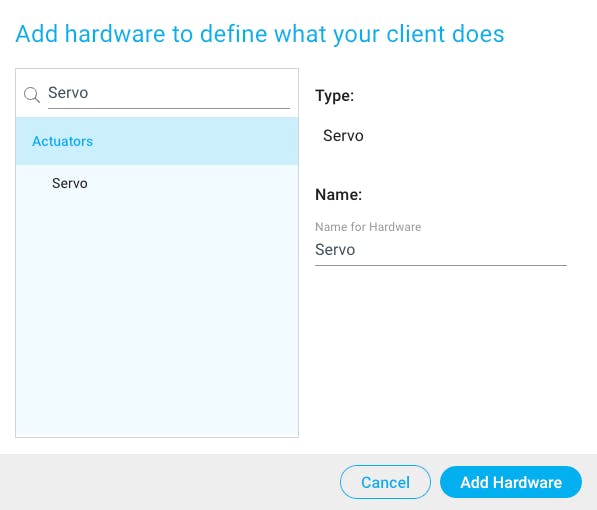
接下来,添加伺服。我们将其命名为伺服。
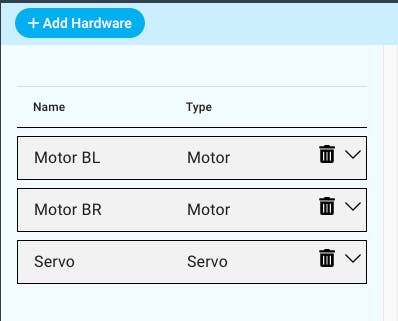
现在,您的设备列表中应该有两个电机和一个伺服。
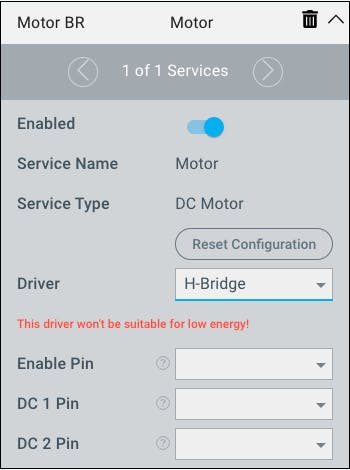
要为电机 BL 设备配置驱动程序,请从驱动程序下拉菜单中选择 L293D H-Bridge 驱动程序。
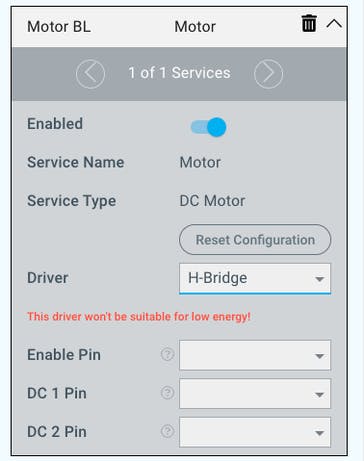
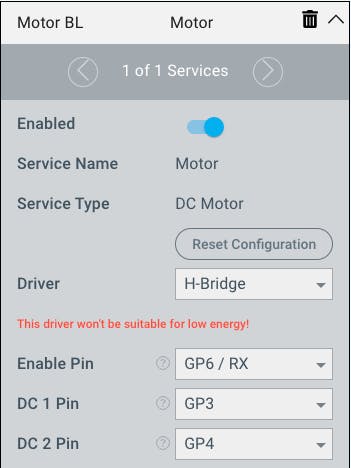
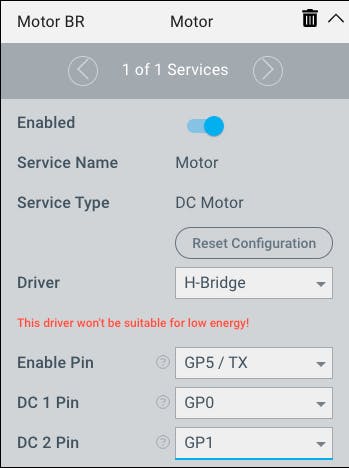
现在,按如下方式配置驱动程序:

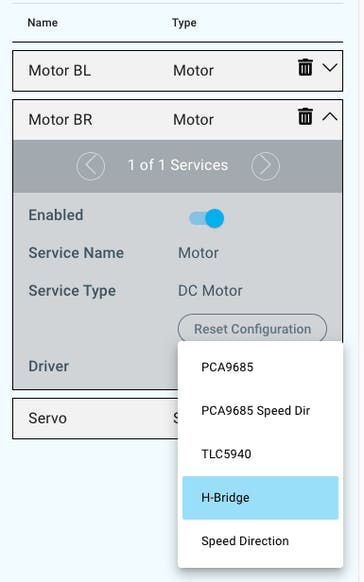
我们现在将配置 Motor BR 驱动程序:

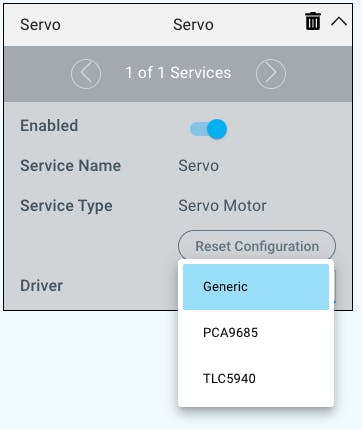
最后,我们将配置伺服驱动程序。
从驱动程序下拉菜单中选择通用驱动程序。
这就是固件!单击屏幕底部的蓝色“保存”按钮保存文件。

现在您可以将固件上传到您已连接到转向车的客户端。
第 4 步:构建应用程序
导航到应用程序页面并单击“+ 创建新按钮”,命名您的应用程序,然后单击创建。

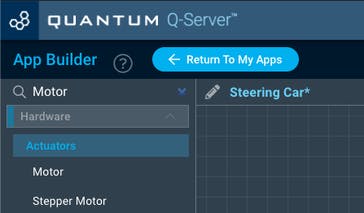
您现在将被定向到 App Builder 画布。
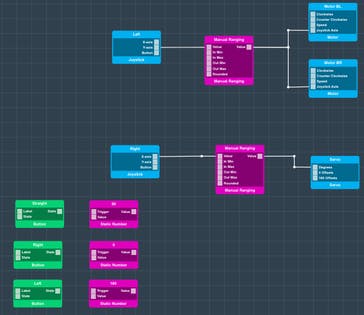
使用左侧工具栏中的搜索栏搜索电机代码对象并将其中两个拖到画布上。
像我们一样命名电机对象。这将帮助您在应用映射期间识别电机。要重命名它们,请单击电机对象并在右侧的属性面板中更改名称。
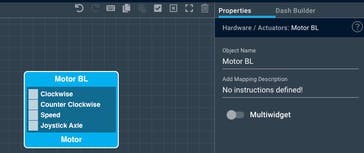
为了保存名称,您必须单击属性选项卡底部的“保存属性”按钮。
接下来,搜索手动测距对象并将其拖到画布上。

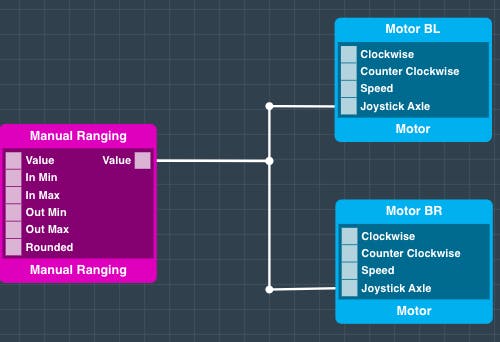
配置手动测距对象如下:

**要配置对象上的每个端口,请单击端口并在屏幕右侧的属性面板中更改属性,然后点击屏幕底部的保存属性。如果您不这样做,您的更改将不会被保存!**
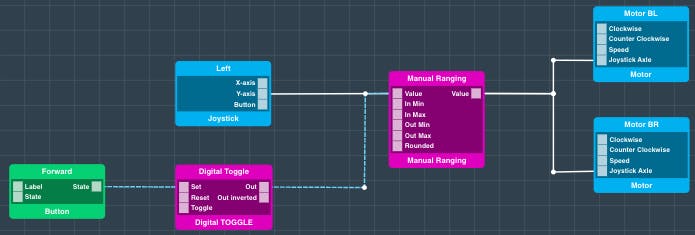
接下来,将 Manual Ranging 对象的 Value out 端口连接到 Motor 对象,如下所示:
现在搜索“操纵杆”对象并将其中两个拖到画布上。命名一个左,另一个右。

现在将 Y 轴端口从 Joystick Left 对象连接到 Manual Ranging 对象,如下所示:
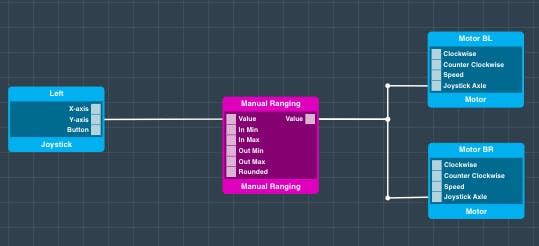
您的转向车现在将使用左操纵杆向前和向后移动。接下来,我们将研究转向。
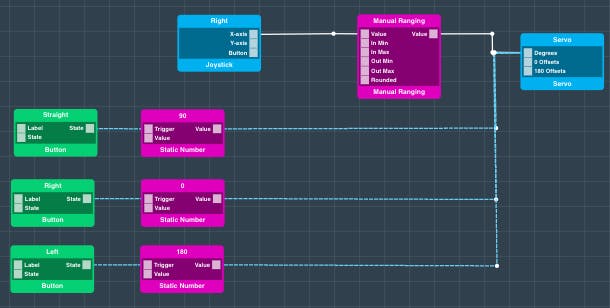
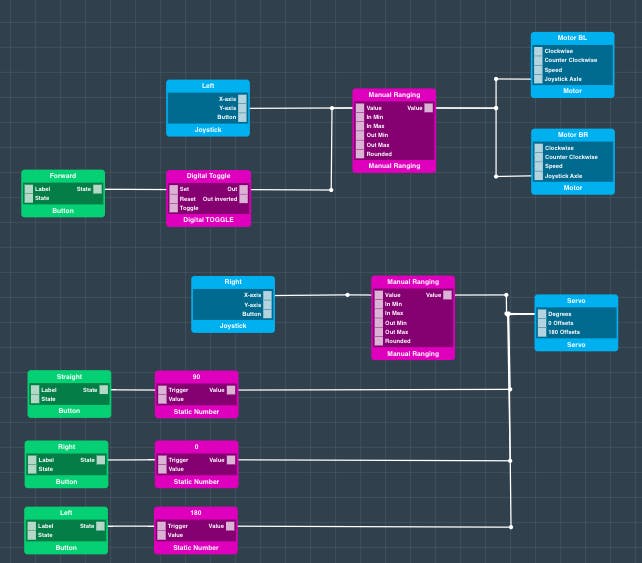
搜索另一个 Manual Ranging 对象和一个 Servo 对象并将其拖到画布上。
我们建议您命名这两个对象。
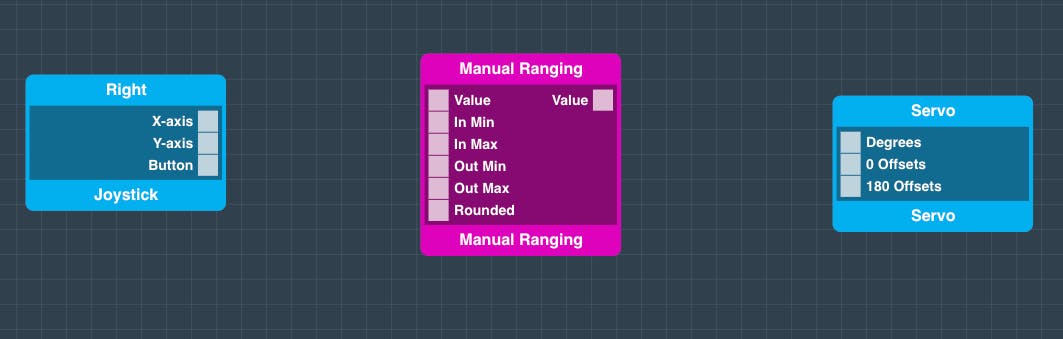
如下配置手动测距对象上的端口:

**我们将 out min 设置为 180,将 out Max 设置为 0,这样当右操纵杆静止在中心位置时,操纵杆的输出将输出 90 而不是 0。**
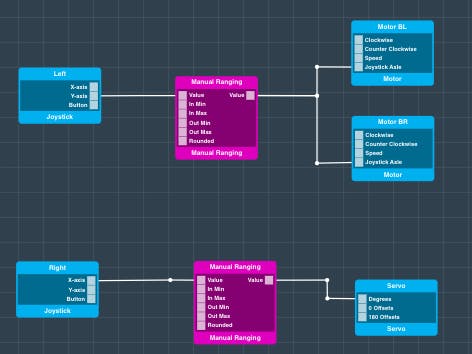
配置手动测距对象后,我们将按如下方式连接代码对象:

**您可能必须调整 0 和 180 偏移量才能在伺服系统上获得适当的运动范围。如果是这种情况,您可以在此处按照我们的偏移调整教程进行操作。**
您的转向车现在完全可以与一组操纵杆一起使用。但是,我们将添加一些允许通过仪表板界面控制汽车的代码对象。
首先,我们将从转向开始。将三个按钮界面对象和三个静态数字对象拖到画布上。如图所示排列并命名它们:
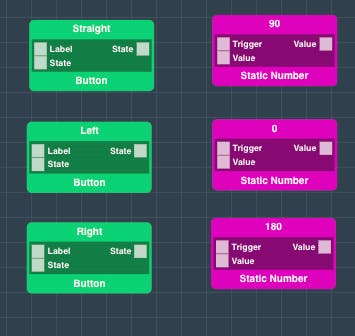
现在,标记每个 Button 对象,以便在仪表板上轻松识别它们。请务必保存每个按钮的属性。否则,您的更改将丢失!

现在使连接以蓝色突出显示:
我们现在将继续使用界面按钮使汽车向前行驶。
将一个数字切换代码对象和一个界面按钮拖到画布上。请务必为按钮命名和标记。
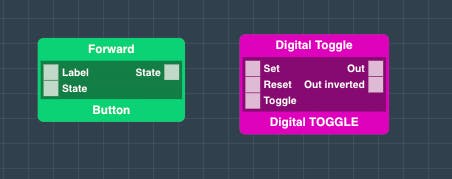
现在进行以下以蓝色突出显示的连接:
恭喜,您的应用程序现已完成!
点击“保存应用程序”并返回您的应用程序页面。
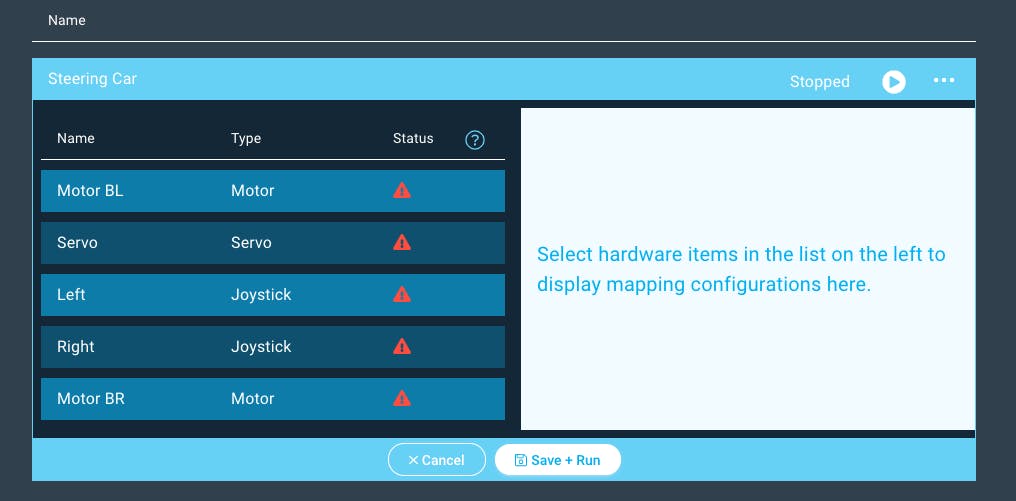
第 4 步:映射您的应用程序
您现在应该回到应用程序页面。
找到您的“转向底盘”应用程序并点击播放按钮。

包含应用程序中所有设备的列表将展开。
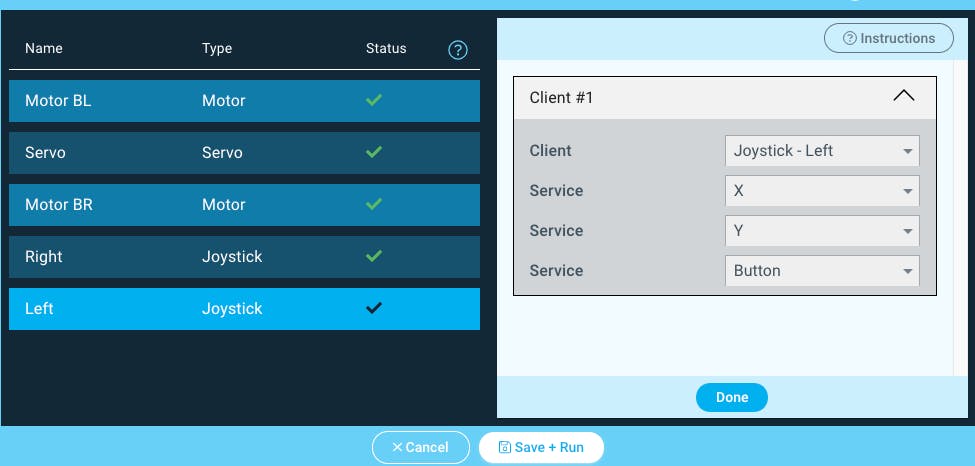
接下来点击“Motor BL”设备,右侧会出现客户端下拉菜单。
从下拉菜单中选择电机 BL 驱动程序并点击“完成”。
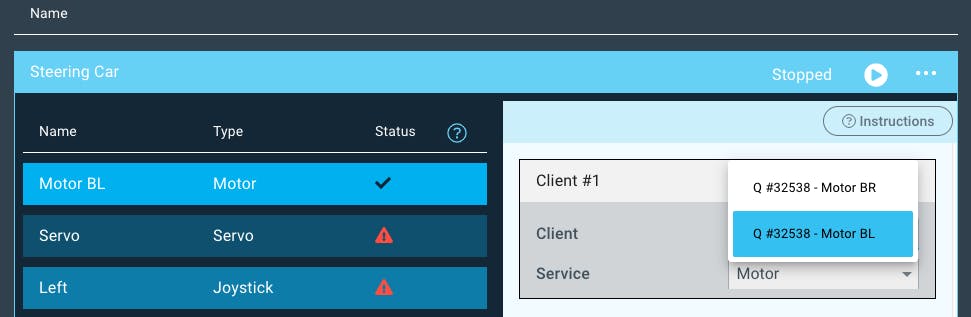
对 Motor BR 和 Servo 设备重复相同的步骤,确保设备名称与对象名称匹配。
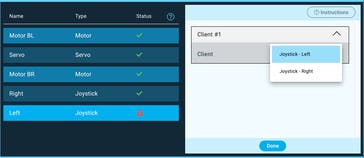
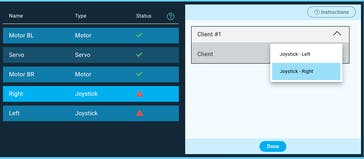
您可以以相同的方式映射操纵杆设备,但请确保将左右操纵杆驱动程序与左右操纵杆设备匹配。
如果您尚未构建操纵杆项目或 DIY 套件,您可以在此处了解如何构建。
请注意状态符号如何变为绿色复选标记。
**将固件设备映射到您的应用程序中的对象时,请务必注意,只有相同类型的设备和对象才能映射在一起。例如,使用这个应用程序,我们只能选择将带有按钮固件的客户端映射到按钮对象。**
第 5 步:运行应用程序!
接下来,点击“保存+运行”

恭喜!您的原型遥控车现已完成,玩得开心!
- 带振动电机的手环开源项目
- 使用Python控制物联网项目的伺服电机
- 2个带记忆的伺服电机的开源项目
- L293电机驱动器开源项目
- ISS Mimic电机分线板开源项目
- 三菱PLC编程实例项目例程-伺服电机控制 41次下载
- 高热or极寒,派克高低温伺服电机就该出场了
- 伺服直流电机仿真图
- 交流伺服电机的单片机控制及其应用.
- 机器人伺服电机如何选型? 8次下载
- 微型伺服电机的应用、工作原理及特点 33次下载
- 电机伺服控制的PCB原理图免费下载 82次下载
- 关于步进电机和伺服电机的威廉希尔官方网站 问题解答 18次下载
- 伺服电机应用威廉希尔官方网站 35次下载
- PLC控制伺服电机应用实例 66次下载
- 交流伺服电机与直流伺服电机的对比分析 463次阅读
- 直流伺服电机和交流伺服电机的差异 683次阅读
- 交流伺服电机与直流伺服电机的区别 631次阅读
- 伺服电机的常见类型详解 881次阅读
- 伺服电机抖动原因分析与伺服电机抖动怎么调分解 1.8w次阅读
- 步进电机和伺服电机有什么区别 7386次阅读
- 步进电机和伺服电机的辨别方法 9124次阅读
- 什么是伺服电机? 伺服电机详解 19.1w次阅读
- PLC在伺服电机中的应用 6026次阅读
- 伺服电机选型计算最简单方式_伺服电机的工作原理 4.2w次阅读
- 伺服电机工作原理,直流和交流伺服电机 1.3w次阅读
- 一般的伺服电机多少钱_松下伺服电机价格 5.5w次阅读
- 伺服电机抖动原因及处理 2.7w次阅读
- 什么是伺服系统,步进电机和伺服电机的区别 1.2w次阅读
- 异步伺服电机和同步伺服电机的区别 3.6w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论