 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
海洋深处的勘探是出于科学或商业原因对海床的物理、化学和生物条件的调查。深海探索是一项相对较新的人类活动,因此深海在地球的大部分地区仍未被探索。
这就是为什么我们提议建造一个水下机器人来进行勘探、测绘和数据收集以及生物样本。这要归功于 BeagleBone Green 的 AM335x 1GHz ARM® Cortex-A8 处理器的强大功能。
第 1 步:设计和草图
在网络上的各种想法和咨询中,我们决定为第一个原型进行自己的设计。
以及找到我们想要构建的目标的设计。

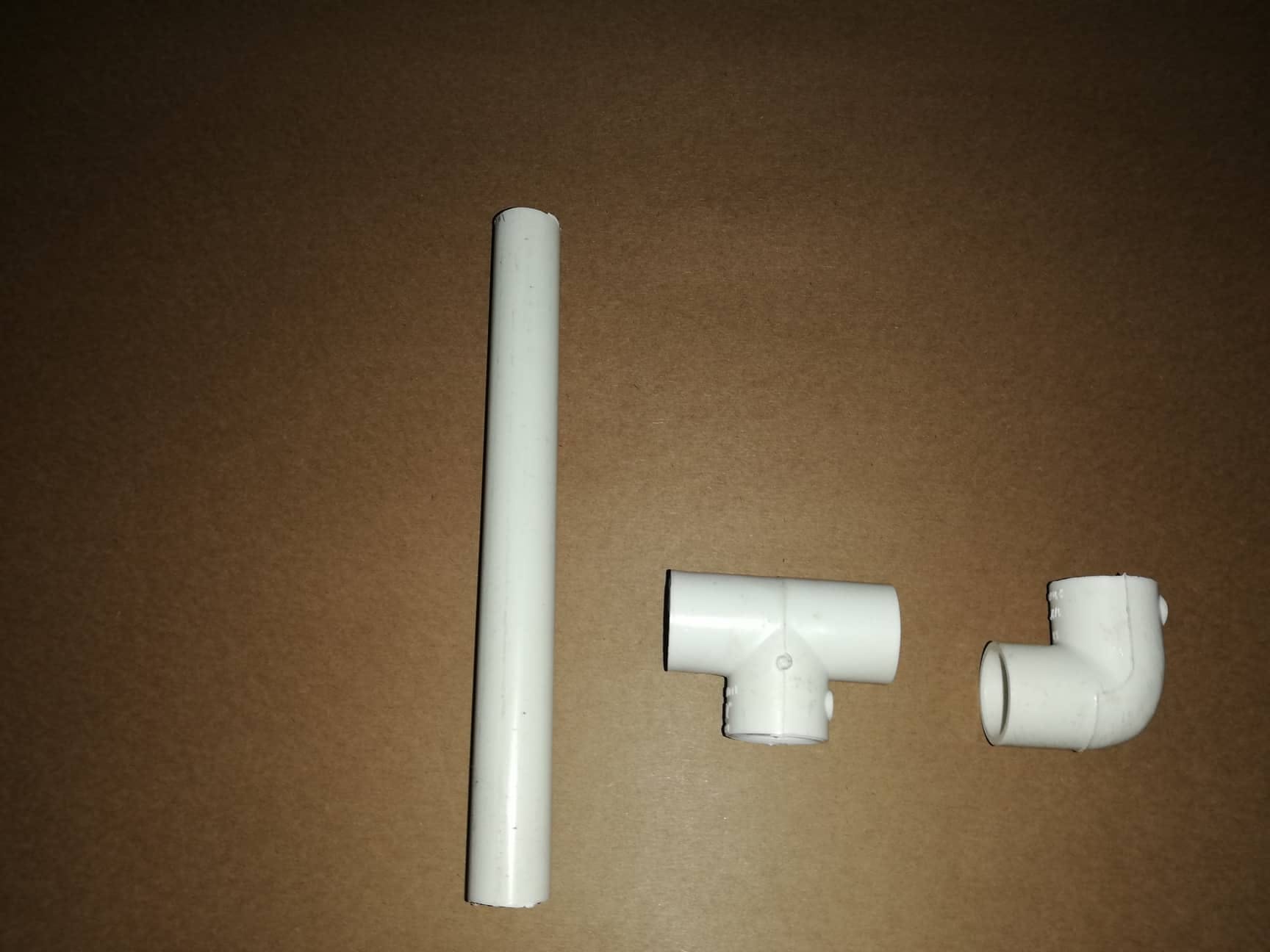
第 2 步:结构
欣赏上图中的结构,它由 PVC 管和接头构成,在五金店很容易买到。我们还决定用喷雾给它一点颜色。
第 3 步:获取和记录 IoT 数据
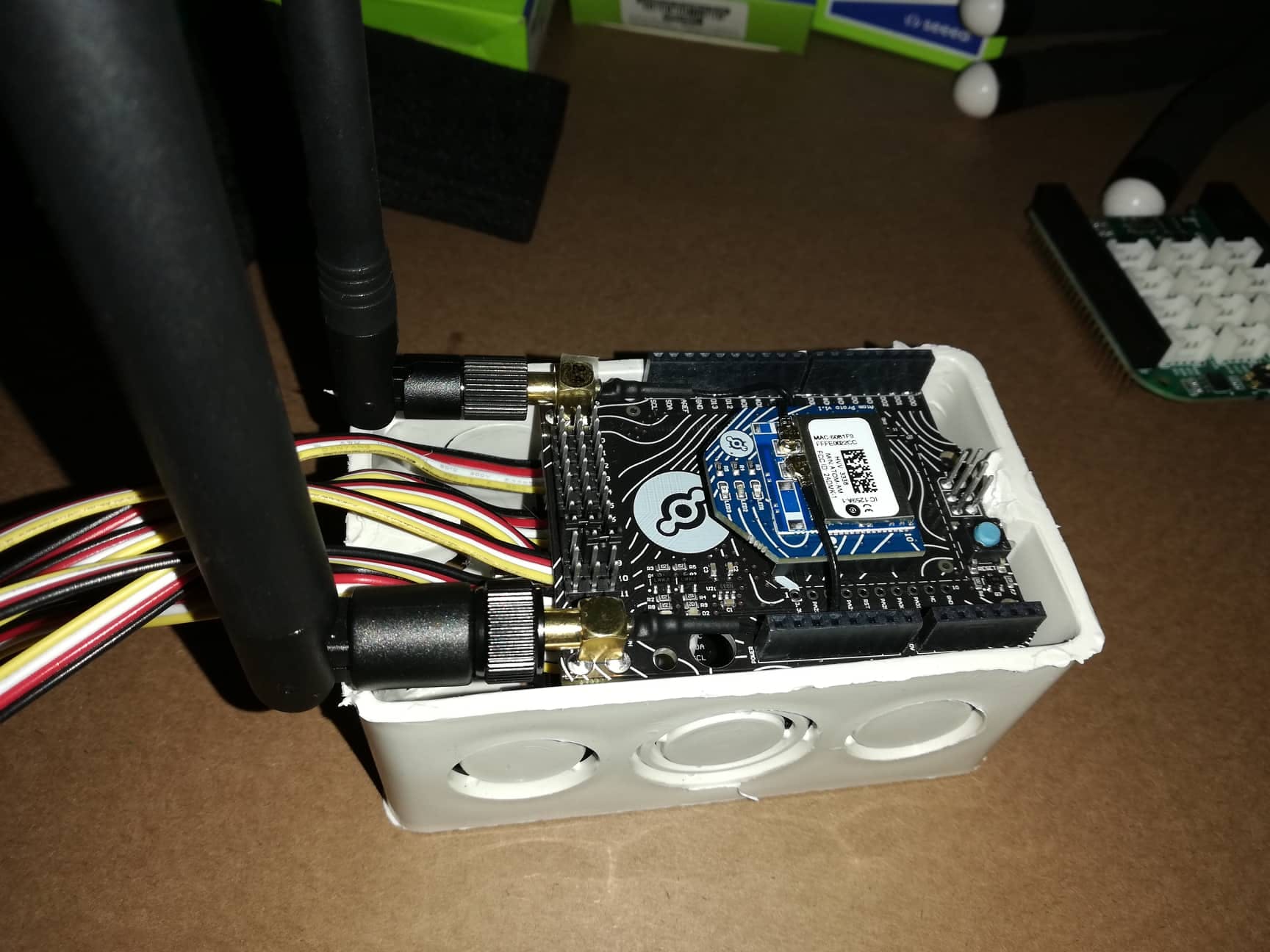
我们必须能够访问在深处获得的信息,这就是为什么对于我们的第一个原型,我们决定实施氦系统套件,因为它具有广泛的覆盖范围和有效性。

我们继续进行配置:在 Helium 网站中,我们将找到将 Arduino 连接到 IoT 的简短教程:https ://www.helium.com/dev
第 2 步:编程和 Arduino 代码
我们将在 Arduino IDE 中加载项目下留下的代码。
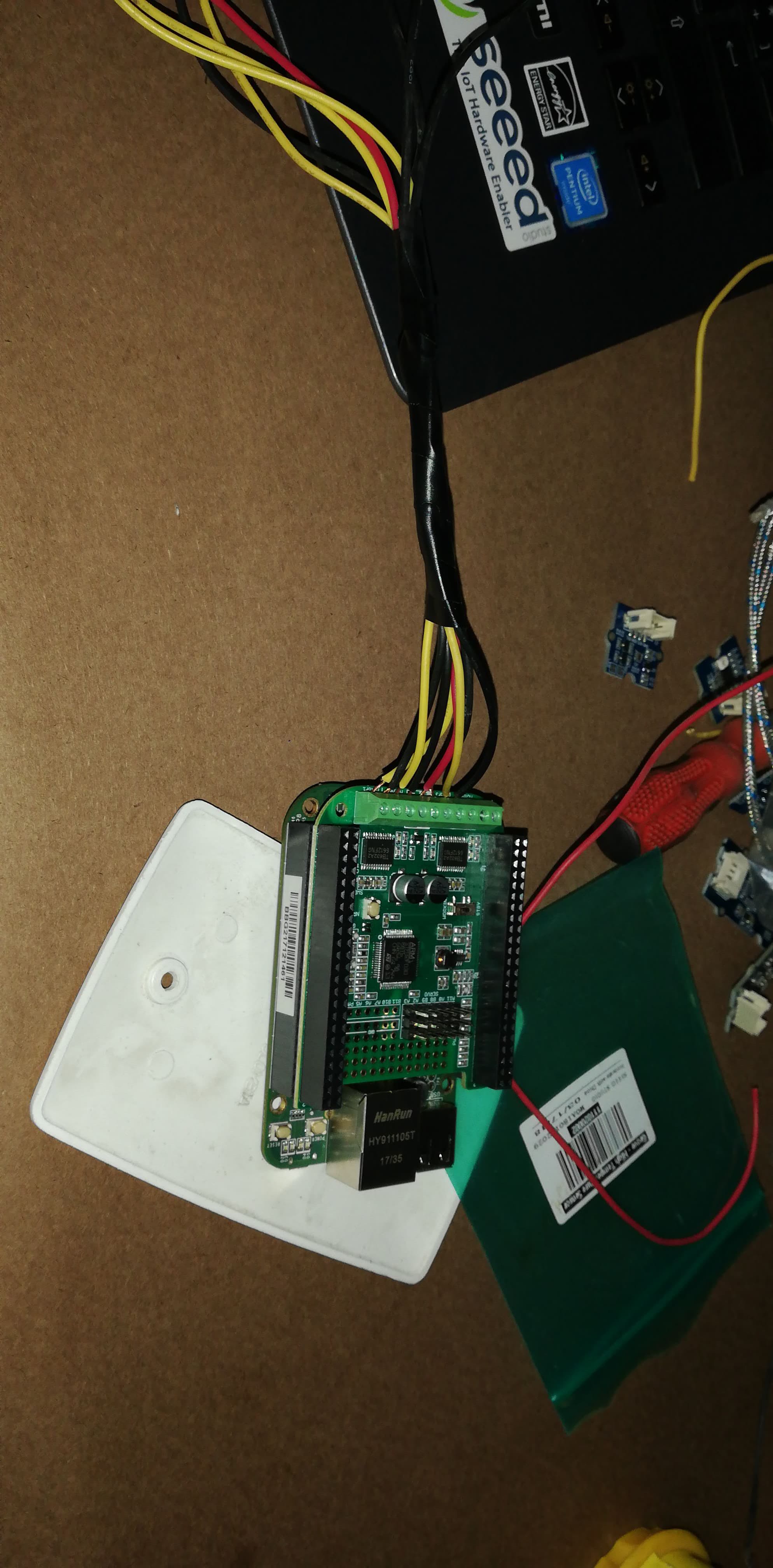
第 3 步:引擎和 BeagleBone Green
我们有必要拥有 Cape Bridge Motor 来通过 BeagleBone 连接和控制引擎。

- 我们继续连接电机
第 4 步:编码 BeagleBone Green
我们加载项目下方的相应代码。
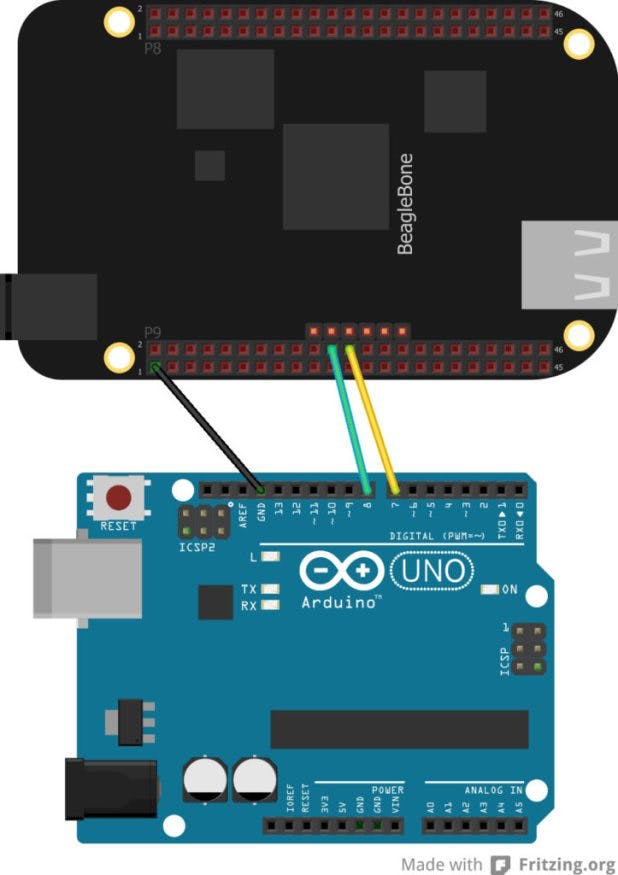
第 5 步:将 Arduino 连接到 BeagleBone Green
由于 Helium 设备与 BeagleBone 没有直接连接,因此我们继续在两个设备之间建立连接,以便在其运行期间共享数据和信息。
/*Accept command from BBB via Serial
*Turns on/off on-board LED
*by OP from teachmemicro.com */
#include
第 6 步:传感器和仪表
我们将使用以下传感器:
- 水位
- 温度
- 空气质量
- 阳光
- 紫外线
- 多通道气体
所有这些传感器都将放在一个用瓶子制成的自制储藏室中。
适量的水进入瓶子并由传感器进行研究。

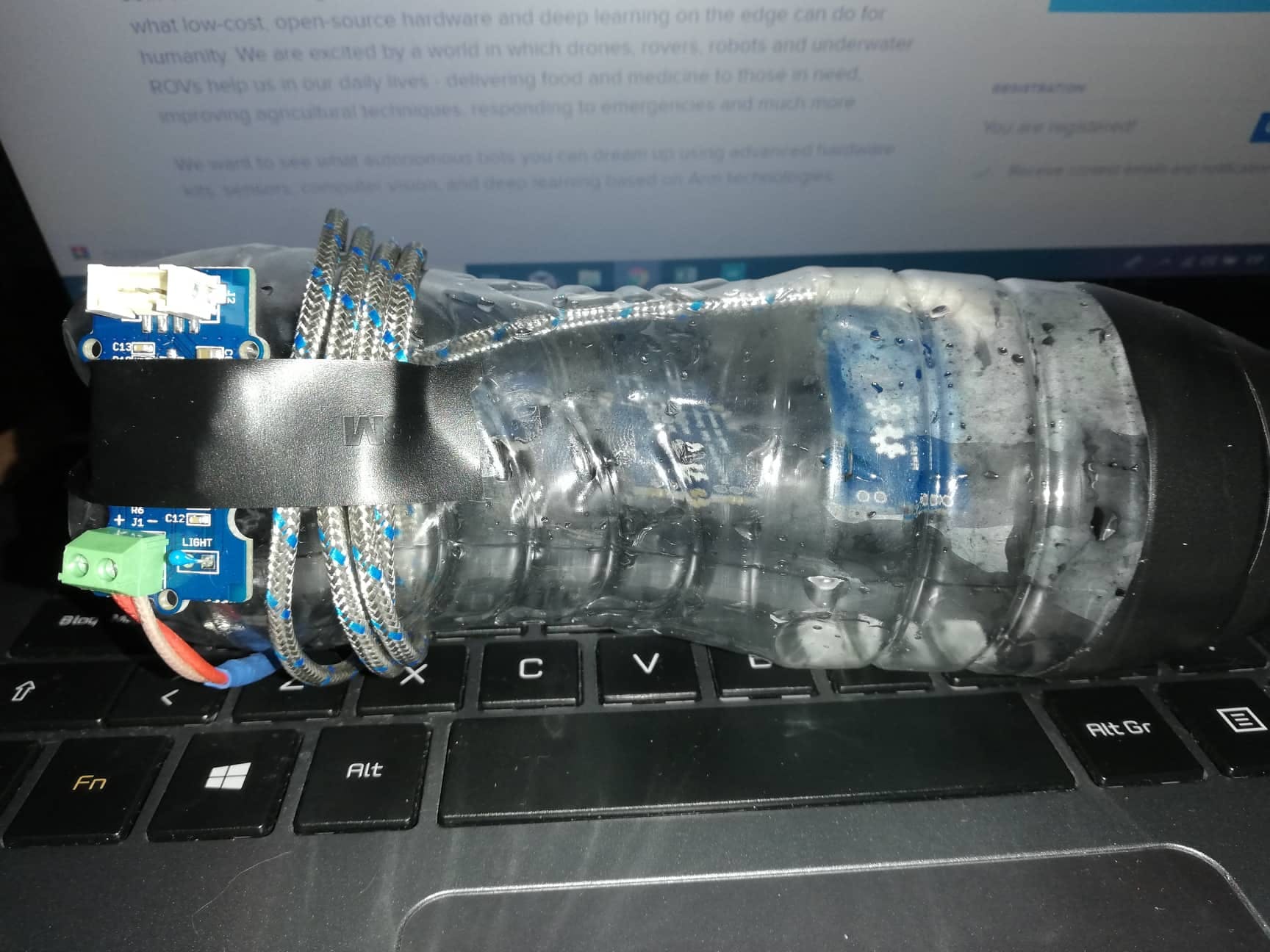
第7步:防水
继续密封或防水所有设备和传感器,以防止渗水。

第 7、8、9、10 步:即将推出!
由于过去几个月在我国发生了几次不便和自然灾害,我们很难完全投入到这个伟大的项目中。
我们希望在下周分享这个好主意的其余过程!
更新:2018 年 10 月 30 日
我们正在开发我们的原型,以实现相机或制图传感器来映射并获得要研究的深度的三维图像。我们希望在本周分享它们!
结论:
我们设计并建造了一个水下机器人,能够在我们的水域深处进行监测和取样。我们也可以说,通过鼓励帮助我们建立这个项目的学校的孩子,我们为工程和威廉希尔官方网站 领域的思想发展做出了重大贡献。
在 30 多个孩子的支持下,我们成功搭建并同时教授产品和设备的操作以及一些基本的编程。我们希望继续以这种迷人的方式与我国公立学校的孩子和年轻人分享。
我们希望每个人都能像我们所做的那样,为这一挑战构建有趣的项目。
谢谢阿姆!为了让这一切成为可能。
- 水下机器人开源构建
- 检测机器人开源分享
- 坦克机器人开源分享
- 扫地机器人开源资料 43次下载
- 英雄机器人开源
- 机器人开源案例
- 四轮转向一四轮驱动模式的全向床椅机器人样机 4次下载
- 基于DSP和PC的农业机器人控制系统 17次下载
- 开架式通用水下机器人开源搭建手册.pdf 11次下载
- 一种水下机器人的水面平台控制系统设计 6次下载
- 小型水下测量机器人的组成及其运动控制系统的设计 10次下载
- 自由度下的水下机器人控制器抗干扰设计 9次下载
- 智能空气微生物采样机器人的设计与实现 4次下载
- 自治水下机器人自适应滑膜控制_吴宝举 5次下载
- 水下滑翔机器人控制系统设计与实现
- 字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能 360次阅读
- 机器人威廉希尔官方网站 中常用的路径规划算法的开源库 842次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2126次阅读
- dfrobotSparki机器人套装简介 2064次阅读
- 医用机器人的定义_医用机器人发展 3122次阅读
- 协作机器人的起源_为什么需要协作机器人 8127次阅读
- 如何区分机器人、协作机器人和移动机器人? 6828次阅读
- 这些水下机器人你见过吗?一些水下机器人产品的介绍 1.4w次阅读
- 库卡协作机器人iiwa和传统机器人KR内部结构解析 2.8w次阅读
- 一文看懂水下机器人的发展及应用 2.1w次阅读
- 软体机器人 前所未见的机器人 3692次阅读
- 机器人的最佳编程语言是什么?机器人十大流行编程语言汇总 3.4w次阅读
- 机器人相关威廉希尔官方网站 发展迅速,在各个领域广泛应用 7103次阅读
- 基于PC104与C8051F120的水下机器人环境监测系统设计方案 2193次阅读
- 工业机器人虚拟样机系统的研究 1385次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论