 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
嵌入式操作系统μC/OS-Ⅱ是一个可裁剪、源码开放、结构小巧、抢先式的实时多任务内核,主要面向中小型嵌入式系统,具有执行效率高,占用空间小,可移植性强,实时性能优良和可扩展性强等特点。数控系统是一个典型的强实时性系统,具有可确定性。可确定性主要是确保条件出现到由此引起的动作开始(或者结束)的时间在一个准确的时段内。在数控系统中,条件是由操作员的指令(如:紧急停止、移动x轴等)或是机床的状态(如刀具破损等)引起的。本文分析了数控系统任务的特点,结合μC/OS-Ⅱ的内核体系,对μC/OS-Ⅱ的任务分类、任务调度和中断服务策略做了改进,使其更加适合于数控系统的应用。
1 μC/OS-Ⅱ对任务的分类
μC/OS-Ⅱ中每个任务有5种状态:休眠(DORMANT)、就绪(READY)、运行(RUNNING)、等待(WAITING)、中断(ISR)。休眠状态的任务驻留在存储器中,还未被内核使用;就绪状态的任务准备执行,优先级低于当前执行的任务,没有得到CPU控制权;任务得到CPU控制权后就处于运行状态;等待事件发生的任务处于等待状态,事件可以是I/O操作完成、共享资源可以利用、时钟周期到等;任务执行过程被中断服务例程中断,任务就处于中断状态。
2 μC/OS-Ⅱ面向数控系统的改进
2.1 数控系统任务的特点
在数控系统中,任务可分为两种:周期运行的任务和信号触发运行的任务,这里所说的信号即包括硬件信号,也包括软件信号。周期运行的任务有定时信号采样、定时I/O口扫描、定时通信等。信号触发运行的任务有中断信号(硬件信号)触发的中断服务任务,命令消息信号(软件信号)触发的命令解释任务等。另外,数控系统中,有些任务还具有运行时间短,运行频率高,要求实时性高的特点,如信号采样、数控机床中的插补控制等。
2.2 改进后的任务划分
在改进后的嵌入式操作系统中任务分为两类:普通任务和抢占式任务。普通任务指通过操作系统调度器调度运行的任务,调度方法如图1所示;抢占式任务指那些不通过调度器调度运行,而是在中断处理中直接运行的任务。下面详细说明这两种任务。
2.2.1 普通任务
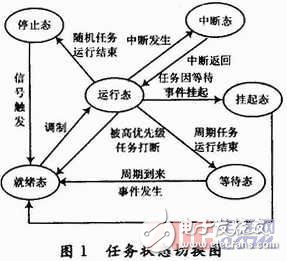
根据数控系统任务多为周期任务和信号触发任务这一特点,将普通任务分为两种:定时运行的周期任务(简称周期任务)和信号触发运行的随机任务(简称随机任务)。相应的,任务状态被划分为6种:运行态、就绪态、等待态、停止态、挂起态和中断态。图1为改进后的任务状态切换图。
在这六种状态中,运行态、就绪态和中断态对应μC/OS-Ⅱ的READY,RUNNING和ISR;挂起态是任务在执行完成前,因等待某事件或资源而被迫停止运行,等待事件或资源到来的状态;等待态是周期任务完成一次运行,等待运行周期到再次运行时的状态;停止态是随机任务等待其触发信号的状态。这里去掉了休眠态,即没有任务的删除,所有的任务一旦建立,在系统运行期间一直存在。这样的处理是因为在数控系统应用中,所有建立的任务一定是有用的,即在系统运行期间一定会被执行,无用的代码和任务不会被添加。在μC/OS-Ⅱ中,设定每个任务都是一个无限的循环,即任务函数永不返回,这样做是不合适的。该操作系统允许任务函数返回,返回后调用函数OSTaskEndDeal(),该函数根据任务的类别,把周期任务放入等待队列,把随机任务放入停止队列。
2.2.2 抢占式任务
抢占式任务为执行时间短且执行频率高于OS系统时钟频率(如信号采样),或实时要求高(如数控机床中的插补控制)的任务。调度任务时间(主要是任务切换所花费的时间)往往比这类任务运行一次的时间还多,这显然是不合理的,抢占式任务正是为解决这种不合理而设计的。抢占式任务不通过OS调度器调度运行,也不采用TCB(任务控制块)标识它们,而是在它们的中断触发信号到达时,在中断中_直接处理,这样做节省了调度、任务切换的时间。但是,由于抢占式任务没有TCB,也就没有相应的任务堆栈,所以抢占式任务在使用资源上要特别注意:一定要使用独立的资源。这样既可以使抢占式任务正常运行,又可以避免抢占式任务对被中断程序的环境造成破坏。具体办法如下:
(1)专用寄存器组。若处理程序中使用了寄存器,则为其分配专用的寄存器组,这样也省去了保存/恢复寄存器的时间消耗。
(2)全局变量。因为函数内部的局部变量是分配在堆栈中的,直接处理方式不形成任务,没有自己的堆栈,如果使用局部变量,其局部变量会分配在被中断任务的堆栈内,所以在该方式下任务应使用全局变量。用户在设计抢占式任务时要有一定限制,否则会影响系统的响应时间。具体限制如下:第一,数量不能太多,最好小于等于3个;第二,必须是执行时间短,执行频率高的任务才能被设为抢占式任务。
3 需要修改的内核数据和函数
1 μC/OS-Ⅱ对任务的分类
μC/OS-Ⅱ中每个任务有5种状态:休眠(DORMANT)、就绪(READY)、运行(RUNNING)、等待(WAITING)、中断(ISR)。休眠状态的任务驻留在存储器中,还未被内核使用;就绪状态的任务准备执行,优先级低于当前执行的任务,没有得到CPU控制权;任务得到CPU控制权后就处于运行状态;等待事件发生的任务处于等待状态,事件可以是I/O操作完成、共享资源可以利用、时钟周期到等;任务执行过程被中断服务例程中断,任务就处于中断状态。
2 μC/OS-Ⅱ面向数控系统的改进
2.1 数控系统任务的特点
在数控系统中,任务可分为两种:周期运行的任务和信号触发运行的任务,这里所说的信号即包括硬件信号,也包括软件信号。周期运行的任务有定时信号采样、定时I/O口扫描、定时通信等。信号触发运行的任务有中断信号(硬件信号)触发的中断服务任务,命令消息信号(软件信号)触发的命令解释任务等。另外,数控系统中,有些任务还具有运行时间短,运行频率高,要求实时性高的特点,如信号采样、数控机床中的插补控制等。
2.2 改进后的任务划分
在改进后的嵌入式操作系统中任务分为两类:普通任务和抢占式任务。普通任务指通过操作系统调度器调度运行的任务,调度方法如图1所示;抢占式任务指那些不通过调度器调度运行,而是在中断处理中直接运行的任务。下面详细说明这两种任务。
2.2.1 普通任务
根据数控系统任务多为周期任务和信号触发任务这一特点,将普通任务分为两种:定时运行的周期任务(简称周期任务)和信号触发运行的随机任务(简称随机任务)。相应的,任务状态被划分为6种:运行态、就绪态、等待态、停止态、挂起态和中断态。图1为改进后的任务状态切换图。
在这六种状态中,运行态、就绪态和中断态对应μC/OS-Ⅱ的READY,RUNNING和ISR;挂起态是任务在执行完成前,因等待某事件或资源而被迫停止运行,等待事件或资源到来的状态;等待态是周期任务完成一次运行,等待运行周期到再次运行时的状态;停止态是随机任务等待其触发信号的状态。这里去掉了休眠态,即没有任务的删除,所有的任务一旦建立,在系统运行期间一直存在。这样的处理是因为在数控系统应用中,所有建立的任务一定是有用的,即在系统运行期间一定会被执行,无用的代码和任务不会被添加。在μC/OS-Ⅱ中,设定每个任务都是一个无限的循环,即任务函数永不返回,这样做是不合适的。该操作系统允许任务函数返回,返回后调用函数OSTaskEndDeal(),该函数根据任务的类别,把周期任务放入等待队列,把随机任务放入停止队列。
2.2.2 抢占式任务
抢占式任务为执行时间短且执行频率高于OS系统时钟频率(如信号采样),或实时要求高(如数控机床中的插补控制)的任务。调度任务时间(主要是任务切换所花费的时间)往往比这类任务运行一次的时间还多,这显然是不合理的,抢占式任务正是为解决这种不合理而设计的。抢占式任务不通过OS调度器调度运行,也不采用TCB(任务控制块)标识它们,而是在它们的中断触发信号到达时,在中断中_直接处理,这样做节省了调度、任务切换的时间。但是,由于抢占式任务没有TCB,也就没有相应的任务堆栈,所以抢占式任务在使用资源上要特别注意:一定要使用独立的资源。这样既可以使抢占式任务正常运行,又可以避免抢占式任务对被中断程序的环境造成破坏。具体办法如下:
(1)专用寄存器组。若处理程序中使用了寄存器,则为其分配专用的寄存器组,这样也省去了保存/恢复寄存器的时间消耗。
(2)全局变量。因为函数内部的局部变量是分配在堆栈中的,直接处理方式不形成任务,没有自己的堆栈,如果使用局部变量,其局部变量会分配在被中断任务的堆栈内,所以在该方式下任务应使用全局变量。用户在设计抢占式任务时要有一定限制,否则会影响系统的响应时间。具体限制如下:第一,数量不能太多,最好小于等于3个;第二,必须是执行时间短,执行频率高的任务才能被设为抢占式任务。
3 需要修改的内核数据和函数
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 嵌入式实时操作系统μC/OS-Ⅱ在LPC1788上的移植及应用
- 嵌入式实时操作系统的应用详细教程说明 2次下载
- 嵌入式数控系统实时平台的设计 0次下载
- 基于CORTEX-A8的嵌入式数控系统设计 6次下载
- 嵌入式实时操作系统μC_OS_在LPC1788上的移植及应用 10次下载
- 嵌入式系统设计与实例开发—ARM与uC/OS-Ⅱ 0次下载
- 嵌入式实时操作系统uCOS-II原理 261次下载
- 基于ARM与FPGA的嵌入式数控系统设计 74次下载
- 嵌入式数控系统的构件研究
- ARM与C/OS-Ⅱ嵌入式系统设计与实例开发
- 嵌入式数控系统的构件研究
- 基于uC OS和双MCU的数控系统研制
- 嵌入式实时操作系统μC OS-II与eCos的比较
- 嵌入式实时操作系统μC/OS-II与eCos的比较
- 嵌入式实时操作系统μC/OS-Ⅱ在ARM处理器上的实现
- 瑞萨CTSU程序在向嵌入式OS操作系统移植时的注意事项 205次阅读
- 基于实时嵌入式操作系统mC/OS-II实现GPRS终端系统的设计 2252次阅读
- 米尔科技嵌入式实时操作系统介绍 2179次阅读
- 基于μC/OS嵌入式操作系统的嵌入式数据管理设计 1178次阅读
- 基于ARM的嵌入式操作系统该如何设计 1480次阅读
- 该如何正确选择嵌入式操作系统 2707次阅读
- 从嵌入式系统到嵌入式操作系统 698次阅读
- 浅析STM32的五大嵌入式操作系统的特点及不足 6147次阅读
- 五种基于STM平台的且满足实时控制要求操作的嵌入式操作系统的介绍 5158次阅读
- 什么是嵌入式操作系统 常见的嵌入式系统有哪些 4w次阅读
- 嵌入式操作系统是什么_嵌入式操作系统有哪些 2w次阅读
- 如何设计一个小型嵌入式操作系统 9350次阅读
- uC/OS和uClinux操作系统的区别 4403次阅读
- 概述及汇总ARM的嵌入式操作系统 2951次阅读
- 基于ARM和FPGA的嵌入式数控系统设计 6184次阅读

下载排行
本周
- 1感应笔电路图
- 0.06 MB | 7次下载 | 免费
- 2美的电磁炉维修手册大全
- 1.56 MB | 5次下载 | 5 积分
- 3Cortex-M3/M4F指令集威廉希尔官方网站 用户手册
- 2.28MB | 3次下载 | 免费
- 4SMD LED选型手册 贴片灯珠
- 5.47 MB | 3次下载 | 免费
- 5基于PLC的拉丝机张力控制系统研究
- 0.14 MB | 2次下载 | 5 积分
- 6LZC3106G高性能谐振控制器中文手册
- 1.29 MB | 1次下载 | 1 积分
- 7JL2233B集成电平转换功能的LDO中文手册
- 0.50 MB | 1次下载 | 免费
- 8加密芯片的一种破解方法和对应加密方案改进设计
- 0.29 MB | 1次下载 | 免费
本月
- 1使用单片机实现七人表决器的程序和仿真资料免费下载
- 2.96 MB | 44次下载 | 免费
- 2UC3842/3/4/5电源管理芯片中文手册
- 1.75 MB | 19次下载 | 免费
- 3华瑞昇CR216芯片数字万用表规格书附原理图及校正流程方法
- 0.74 MB | 14次下载 | 3 积分
- 4DMT0660数字万用表产品说明书
- 0.70 MB | 13次下载 | 免费
- 53314A函数发生器维修手册
- 16.30 MB | 13次下载 | 免费
- 6TPS54202H降压转换器评估模块用户指南
- 1.02MB | 8次下载 | 免费
- 7STM32F101x8/STM32F101xB手册
- 1.69 MB | 8次下载 | 1 积分
- 8感应笔电路图
- 0.06 MB | 7次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935119次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420062次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233084次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191367次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183335次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81581次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73807次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65987次下载 | 10 积分





 工商网监
工商网监
评论