 电子发烧友App
电子发烧友App










 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
基于MCU和DSP的运动控制系统由于结构紧凑、环境适应性好而有良好的发展前景。由于PC机与MCU和DSP资源环境差异较大, 进行MCU和DSP环境中的运动控制威廉希尔官方网站
研究十分必要。
基于MCU和DSP的运动控制研究硬件平台设计遵从运动控制系统的开放式、可重构和网络化的发展方向, 选用主流的MCU及DSP芯片S3C2410A和TMS320F2812, 适应信息网、控制网和伺服网(接口) 网络化需求, 采用双层、组合式模式, 实现了一个实用可靠的硬件环境。它可以进行单CPU、并行双CPU和层次化多CPU的运动控制算法和系统支撑软件的研究。
引言
开放式控制器体系结构源于“开放式”的PC(个人计算机) 威廉希尔官方网站 , 目前的开放式运动控制器多为PC+运动控制卡结构, 随着MCU(微控制器) 和DSP(数字信号处理器)性能的增强, MUC和DSP取代PC的趋势日趋明显, 而这种嵌入式的紧凑结构较PC有更广泛的环境适应性。MCU、DSP和PC差异较大, PC环境中的运动控制威廉希尔官方网站 不可能直接向MCU和DSP系统中转移, 基于MCU和DSP硬件平台的运动控制威廉希尔官方网站 的研究十分必要。
设计目标与需求分析
运动控制系统发展方向
在开放式控制器威廉希尔官方网站 的推动下, 运动控制系统由传统的封闭式结构朝着开放、可重构、网络化方向发展。按照《开放式数控系统第1 部分: 总则》(GB/T18759.1- 2002) 的定义, 开放式数控系统有三个层次的开放, 第一层, 系统功能可配置, 人机界面、伺服驱动单元的运动控制接口、逻辑控制单元接口均开放; 第二层, 系统软件体系结构、拓扑结构和应用软件接口开放, 第三方的应用软件能在系统中安装运行并实现互操作性, 且第三方的软件模块可以在拓扑结构不变的情况下对本系统软件模块置换和扩展; 第三层, 系统实现可重构。国标GB/T 18759.1- 2002 尚未公布可重构的详细内容。运动控制系统是数控系统的一个核心组件, 其威廉希尔官方网站 发展方向和开放式数控系统类似。现代运动控制器联通信息网、逻辑控制网和伺服控制网(接口) 三种网络。
在MCU 和DSP 环境中运动控制威廉希尔官方网站 的研究课题
和PC相比, MCU和DSP采用了哈佛结构, 流水线威廉希尔官方网站 , 超长指令字, 加乘器等提高CPU速度, 并在片上扩展了控制用前向和后向通道外设及通信接口, 在这种环境下, 实现开放、可重构和网络化运动控制功能, 下列研究是必要的:
①体系结构的研究, 以多CPU方式实现复杂的运动控制;
②嵌入式系统中实时操作系统的研究, 解决MCU和DSP控制器系统软件问题;
③MCU和DSP环境中运动控制算法的研究, 解决少资源情况下, 复杂控制算法的实现问题;
④软件模块管理与剪裁威廉希尔官方网站 的研究, 解决通用威廉希尔官方网站 方案的应用针对性问题;
⑤网络通信威廉希尔官方网站 的研究:解决伺服通信网、逻辑控制网和信息网通信问题。
硬件系统设计目标与结构要求
基于MCU和DSP的运动控制威廉希尔官方网站 研究硬件平台的设计目标是为上述研究课题提供硬件系统环境, 以MCU或DSP为核心的商品化运动控制器并不少见,但它们只对用户提供运动控制函数库的接口, 并不是完全意义上的开放, 必须开发运动控制器的硬件研究平台, 并满足下列要求:
①类型与结构化模式要求:CPU选型应是主流的MCU和DSP芯片,结构体系采用单CPU,双CPU流水线模式和层次化结构, CPU可以独立工作, 可以组成流水线模式工作。也可以采用两层结构,上下层分别处理不同实时要求的任务。
②开放性要求:各CPU单元配置计算机通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地实现硬件互联。
③网络化要求:配有伺服单元接口、现场总线接口和以太网接口。
系统设计
运动控制系统硬件结构
运动控制系统硬件基本结构如图1 所示:
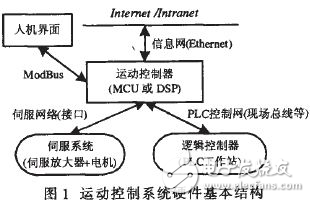
基于MCU和DSP的运动控制研究硬件平台设计遵从运动控制系统的开放式、可重构和网络化的发展方向, 选用主流的MCU及DSP芯片S3C2410A和TMS320F2812, 适应信息网、控制网和伺服网(接口) 网络化需求, 采用双层、组合式模式, 实现了一个实用可靠的硬件环境。它可以进行单CPU、并行双CPU和层次化多CPU的运动控制算法和系统支撑软件的研究。
引言
开放式控制器体系结构源于“开放式”的PC(个人计算机) 威廉希尔官方网站 , 目前的开放式运动控制器多为PC+运动控制卡结构, 随着MCU(微控制器) 和DSP(数字信号处理器)性能的增强, MUC和DSP取代PC的趋势日趋明显, 而这种嵌入式的紧凑结构较PC有更广泛的环境适应性。MCU、DSP和PC差异较大, PC环境中的运动控制威廉希尔官方网站 不可能直接向MCU和DSP系统中转移, 基于MCU和DSP硬件平台的运动控制威廉希尔官方网站 的研究十分必要。
设计目标与需求分析
运动控制系统发展方向
在开放式控制器威廉希尔官方网站 的推动下, 运动控制系统由传统的封闭式结构朝着开放、可重构、网络化方向发展。按照《开放式数控系统第1 部分: 总则》(GB/T18759.1- 2002) 的定义, 开放式数控系统有三个层次的开放, 第一层, 系统功能可配置, 人机界面、伺服驱动单元的运动控制接口、逻辑控制单元接口均开放; 第二层, 系统软件体系结构、拓扑结构和应用软件接口开放, 第三方的应用软件能在系统中安装运行并实现互操作性, 且第三方的软件模块可以在拓扑结构不变的情况下对本系统软件模块置换和扩展; 第三层, 系统实现可重构。国标GB/T 18759.1- 2002 尚未公布可重构的详细内容。运动控制系统是数控系统的一个核心组件, 其威廉希尔官方网站 发展方向和开放式数控系统类似。现代运动控制器联通信息网、逻辑控制网和伺服控制网(接口) 三种网络。
在MCU 和DSP 环境中运动控制威廉希尔官方网站 的研究课题
和PC相比, MCU和DSP采用了哈佛结构, 流水线威廉希尔官方网站 , 超长指令字, 加乘器等提高CPU速度, 并在片上扩展了控制用前向和后向通道外设及通信接口, 在这种环境下, 实现开放、可重构和网络化运动控制功能, 下列研究是必要的:
①体系结构的研究, 以多CPU方式实现复杂的运动控制;
②嵌入式系统中实时操作系统的研究, 解决MCU和DSP控制器系统软件问题;
③MCU和DSP环境中运动控制算法的研究, 解决少资源情况下, 复杂控制算法的实现问题;
④软件模块管理与剪裁威廉希尔官方网站 的研究, 解决通用威廉希尔官方网站 方案的应用针对性问题;
⑤网络通信威廉希尔官方网站 的研究:解决伺服通信网、逻辑控制网和信息网通信问题。
硬件系统设计目标与结构要求
基于MCU和DSP的运动控制威廉希尔官方网站 研究硬件平台的设计目标是为上述研究课题提供硬件系统环境, 以MCU或DSP为核心的商品化运动控制器并不少见,但它们只对用户提供运动控制函数库的接口, 并不是完全意义上的开放, 必须开发运动控制器的硬件研究平台, 并满足下列要求:
①类型与结构化模式要求:CPU选型应是主流的MCU和DSP芯片,结构体系采用单CPU,双CPU流水线模式和层次化结构, CPU可以独立工作, 可以组成流水线模式工作。也可以采用两层结构,上下层分别处理不同实时要求的任务。
②开放性要求:各CPU单元配置计算机通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地实现硬件互联。
③网络化要求:配有伺服单元接口、现场总线接口和以太网接口。
系统设计
运动控制系统硬件结构
运动控制系统硬件基本结构如图1 所示:
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 基于MATLAB的DSP控制系统仿真平台设计方案 20次下载
- 如何使用DSP和CPLD进行运动控制器的设计与应用资料说明 8次下载
- 基于DSP的运动控制器的探究 2次下载
- MCU+DSP嵌入式平台的i机接口设计 0次下载
- DSP的运动控制系统设计 12次下载
- MCU和DSP的运动控制研究硬件平台设计 6次下载
- 基于DSP与FPGA的运动控制器设计 30次下载
- 基于DSP的永磁平面电机运动控制系统研究 18次下载
- 基于DSP的多轴运动控制器的研究与设计 6次下载
- 基于DSP与FPGA的运动控制器研究 93次下载
- 基于DSP的自由曲线加工运动控制系统的研究 49次下载
- 基于DSP的运动控制系统设计
- 基于MCU和DSP的运动控制研究硬件平台设计
- 基于DSP的运动控制器的研究与开发
- 基于DSP的无线运动控制方法
- MCU、DSP和FPGA的区别 4091次阅读
- 全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发 737次阅读
- 全国产EtherCAT运动控制边缘控制器-ZMC432H 670次阅读
- 采用ACRl505型运动控制卡实现机械自动封装系统的设计 891次阅读
- 采用ADT850运动控制卡和PC机实现多轴运动控制系统的设计 2523次阅读
- MIPS平台上运动控制器的调度抖动的测试方法设计详解 1199次阅读
- 简介pmac运动控制卡 1.3w次阅读
- MCU市场更加丰富多元,DSP/FPU不同硬件加速单元具互补作用 1737次阅读
- 基于ARM与DSP的嵌入式运动控制器设计详解 7265次阅读
- 基于CPLD的开放式四轴运动控制器的硬件、软件设计 1959次阅读
- 智能硬件平台有哪些_智能硬件平台哪个最好 1.4w次阅读
- 中颖单片机双核(DSP和MCU)SH99F100基于工业控制中的应用 1870次阅读
- 基于DSP的运动相机控制系统设计 1496次阅读
- 基于CPLD/DSP的赛车全电防滑刹车控制器设计 1295次阅读
- 基于DSP的覆冰机器人控制系统研究 603次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1489次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 91次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 9次下载 | 免费
- 6基于AT89C2051/4051单片机编程器的实验
- 0.11 MB | 4次下载 | 免费
- 7基于单片机和 SG3525的程控开关电源设计
- 0.23 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33562次下载 | 免费
- 6接口电路图大全
- 未知 | 30319次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21539次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935053次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537791次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233045次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183277次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论