 电子发烧友App
电子发烧友App


实验四、机构传动系统设计、拼装及运动分析实验
一、实验目的
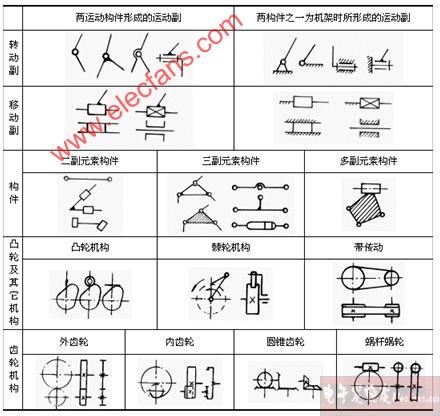
1.认识典型机构
2.设计实现满足不同运动要求的传动机构系统
3.拼装机构系统
4.对运动构件进行运动检测分析(位移、速度、加速度分析)
二、实验原理
机械传动系统的设计是机械设计中极其重要的一个环节,其中了解常用传动机构,合理设计传动系统是一个认识和创新的过程。为了实现执行机构工作的需求(运动、动力),我们必须利用不同机构的组合系统来完成。因此对于常用机构,如连杆机构,齿轮传动机构,间歇运动机构,带、链传动机构的结构及运动特点应有充分的了解,在此基础上,我们可以利用它们所在组合成我们需要的传动系统。
执行机构常见的运动形式有回转运动、直线运动和曲线运动,传动系统方案的设计将以此为目标。
执行机构的运动不仅仅有运动形式的要求,而且有运动学和动力学的要求。因此我们必须对设计好的传动系统中的重要运动构件进行运动学和动力学分析(速度、加速度分析),使执行构件满足运动要求(如工作行程与回程的速度要求,惯性力要求,工作行程要求等)。任何传动机构系统都有其特点,适应于不同的工作要求和安装位置,我们应该学会在设计和拼装中进行系统分析和评估。
该实验台可拼装齿轮----杆组合机构、凸轮组合机构、不完全轮组合机构、槽轮组合机构,齿轮----齿条组合机构、链----齿轮组合机构及棘轮组合机构等。
三、实验台机械结构
该实验台主要由底座(安装平台)、平面连杆机构、凸轮机构、间歇机构(槽轮机构、不完全齿轮机构、棘轮机构等)、齿轮传动机构、带(链)传动等机构组成,以及动驱动组成。
※ 特别注意:在拧紧螺钉的过程中应均匀旋紧切忌单边拧紧,否则会损坏传感器。
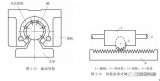
1.底座(安装平台)的组成:
图1安装平台的组成
1、走条 2、左垂直支撑 3、横梁组件 4、内六角圆柱头螺钉M8X35 5、右垂直支撑
6、支承角钢 7、直流电机 8、电机带轮 9、走条螺母 10、底板
左、右垂直支撑(2、5)有四条垂直于底板(10)且相互平行的直槽用于固定横梁组件(3)。横梁组件(3)可在水平、垂直方向根据安装需要有级调整。走条(1)可在X、Y方向调整安装位置。在直流电机(7)装有电机带轮(8)并用螺栓通过走条螺母(9)固定在走条(1),可沿走条(1)上的直槽方向调整。
横梁组件由横梁(1)、支承套(2)以及六角头螺栓M6X40(3)等组成。横梁(1)两端各有1个M8的螺孔用于与左、右垂直支撑固定用, 横梁(1)中有一横槽用于安装构件的横梁固定套或基座等。左端的方槽用于安装滑块。两端的圆孔用于横梁固定套通过用。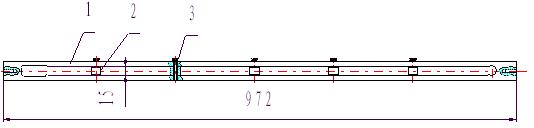
图2 横梁组件
1、 横梁 2、支承套 3、六角头螺栓M6X40
2.回转付的结构:
图5回转付Ⅲ 图6 回转付Ⅳ
1、 曲柄 2、导杆销轴 3、导杆销套 1、大平垫8 2、滑块轴 3、线位移连接块
4、大平垫8 5. 嵌件锁紧螺母M8 4、嵌件锁紧螺母M8 5、滑块
回转付Ⅰ(图3):由杆Ⅰ、Ⅱ的套与回转销轴(3)组成,两个嵌件锁紧螺母M8(5)
用于控制轴向间隙。用于连杆与导杆、连杆与摇杆之间的连接。
回转付Ⅱ(图4):主要由横梁固定套(4)的内套与回转轴(1)构成。横梁固定套(4)
上的槽可在图二所示的横梁组件的槽中根据需要移动并可用小圆螺母M24×1.5(5)固定。回转轴(1)的左端可通过连接套与光栅角位移相连另一端通过键(6)与回转件相
连。嵌件锁紧螺母M8(2) 用于控制轴向间隙。用于回转件的运动与安装。
回转付Ⅲ(图5):主要由导杆销套(3)、固定在曲柄(1)的导杆销轴(2)等组成。
用于导杆的连接,导杆销套(3)既可在导杆销轴(2)转动又可在导杆槽内滑动。嵌件锁紧螺母M8(5) 用于调整导杆销套(3)在导杆销轴(2)上的轴向间隙。
回转付Ⅳ(图六):主要由铰接在滑块(5)孔内的滑块轴(2)(详见图二十二b)、嵌
件锁紧螺母M8(4)等组成。滑块(5)可在图二所示的横梁组件的槽内滑动。嵌件锁紧螺母M8(4) 用于调整滑块(5)在滑块轴(2)上的轴向间隙。线位移连接块(3)用于连接直线位移传感器。
3.传感器的安装方法:
(1)光栅角位移传感器的安装方法:(见图7) 用于测量回转件或者摆动件的角位移。
将光栅角位移传感器(1)的止口套在角位移传感器座(3)上并用十字槽盘头螺钉
M3X12固定。根据被检测件的位置调整图二所示的横梁组件的相对位置,通过连接块
(4)用六角头螺栓M8X30固定在横梁组件上。弹性连接套(5)分别为L=53、60、73三
种规格,根据传感器与被检测件间的轴向距离选定后用螺丝刀将卡箍(6)拧紧。
图7光栅角位移传感器的安装
1、光栅角位移传感器 2、六角头螺栓M8X30 3、角位移传感器座 4、连接块
5、弹性连接套 6、卡箍
(2)直线位移传感器的安装方法:(见图8)
将固定块(5)、连接座(3)用内六角圆柱头螺钉M4X25固定在横梁部件上。在允许
的范围内L尽可能的大以增加传感器的稳定性。将直线位移传感器(1)放入连接座(3)的凹弧内并将连接块(2) 内六角圆柱头螺钉M4X30(4)拧紧。
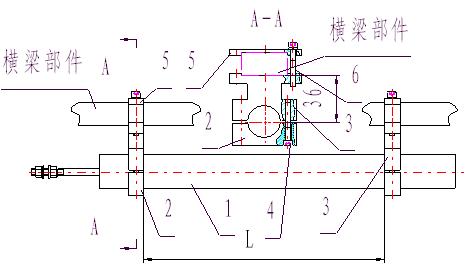
图8 直线位移传感器的安装
1、直线位移传感器 2、连接块 3、连接座 4、内六角圆柱头螺钉M4X30
5、固定块 6、内六角圆柱头螺钉M4X25
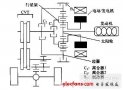
本实验台电机转速控制系统有两种方式:
①手动控制:通过调节控制箱上的两个调速按钮调节电机转速。
②软件控制:在实验软件中根据实验需要来调节。
4.软件说明
软件操作说明如下:点击可执行文件就会进入主界面。
主界面包括8个主菜单: 打开 、运动仿真、原理说明、仅数字信号、仅interwetten与威廉的赔率体系
信号、数字和模拟信号、关于、退出。
点击“退出”可以终止程序的运行,点击“关于”可以了解有关软件版本的相关信息。点击“原理说明”可以了解实验原理。点击“打开”可以打开以前所保存的文件。点击“运动仿真”进入仿真窗体:
参数检测主要包括:数字和模拟信号的检测。如果想同时检测二者的信号,选择“数字和模拟信号”,如果只想检测其中一个参数,选择“仅模拟信号”或“仅数字信号”。选择后单击进入相应的实测窗体:
1、实测窗体有“文件(F)”、“实验项目(P)”、“调速(D)”、“操作(O)”、“工具(T)”和“帮助(H)”菜单。
(1)“文件(F)”下有“新建、打开、保存、打印、退出”五个子菜单,它们分别有“新建一个文件、打开一个已保存文件和退出此测试界面的功能。
(2)“实验项目(P)”有“数字信号”、“模拟信号”、
“数字和模拟信号”菜单,分别具有单一测试数字信号、模拟信号以及同时测试数字和模拟信号的功能。
(3)“调速(D)”有“加速”、“减速”、“停机”菜单,分别具有让电机加速、减速、
停止的功能。
(4)“操作(O)”下有“采集”和“停止采集”菜单,分别有采集信号和停止采集信
号的功能。
(5)“工具(T)”下有“选项”子菜单,点击出现选项卡,可以通过选择“纵坐标缩
放”、“角位移”、“直线位移”、“角位移采样方向”对实测窗体进行相关的设置。
还可以选择“帮助”菜单来获得相关的帮助信息
2、在菜单栏的下面有工具栏,工具栏上有很多的快捷图标,只要把鼠标停留在快捷图标上,系统会自动提示它相应的功能。通过快捷图标同样可以完成菜单栏里的全部功能。
四、实验步骤
1.认识实验台提供的各种传动机构的结构及传动特点
2.确定执行构件的运动方式(回转运动、间隙运动等)
3.设计或选择所要拼装的机构
4.看懂该机构的装配图和零部件结构图
5.找出有关零部件,并按照装配图进行安装
6.机构运动正常后,用手拨动机构,检查机构运动是否正常
7.机构运动正常后,可将传感器安装在被测构件上,并连接在数据采集箱接线端口上
8.打开采集箱电源,按“加速”键,逐步增加电机转速,观察机构运动
9.打开计算机,并进入“检测”界面,观察相应构件的运动情况,如果有仿真界面内提供的机构,则可按实际机构的几何参数,对执行构件的运动进行仿真
10.实验完毕后,关闭电源,拆下构件
五、实验报告
1.对系统进行评价和分析
2.对执行构件的运动规律进行分析(有无急回特性,有无冲击,最大行程等)
思考题:
1.系统由几部分组成?
2.该系统安装精度如何,可如何改善?精度误差造成的运动失真的分析。
3.执行构件的运动特点如何?
4.系统可应用在哪些机械系统中,有何优缺点?
机械结构及拼装方式
该实验台可拼装齿轮----杆组合机构、凸轮组合机构、不完全轮组合机构、槽轮组合机构,齿轮----齿条组合机构、链----齿轮机组合构及棘轮组合机构等。
该实验台采用台架式结构,机构拼装可在横杆上装配,不同的机构采用部件式的装配方式,各零部件之间的安装位置可调。系统由一可调速直流机驱动,传动距离可调。安装位置可根据需要调整。
1.齿轮传动----四杆组合机构(图号为PCZ1.0--1),
其传动路线为:
电机 带传动 齿轮传动 四杆机构(大齿轮为曲柄)运动输出构件为摇杆。
可检测摇杆及曲柄的运动变化曲线。
2.齿轮传动----曲柄滑块组合机构(图号为PCZ1.0--2)
其传动路线为:
电机 带传动 齿轮传动 曲柄滑块机构(大齿轮为曲柄),运动输出构件为滑块。
可检测曲柄及滑块的运动变化曲线。
3.齿轮传动----曲柄(导杆)摇杆组合机构(图号为PCZ1.0--3)
其传动路线为:
电机 带传动 齿轮传动 六杆机构(大齿轮为曲柄)运动输出构件为摇杆。
可检测曲柄及摇杆的运动变化曲线。
4.齿轮传动----曲柄(导杆)滑块组合机构(图号为PCZ1.0--4),
其传动路线为:
电机 带传动 齿轮传动 六杆机构(大齿轮为曲柄)运动输出构件为摇杆。
可检测曲柄及摇杆的运动变化曲线。
5.槽轮机构(图号为PCZ2.0)
其传动路线为:
电机 带传动 拨杆 槽轮,运动输出构件为槽轮。
可检测拨杆及槽轮的运动变化曲线。
6.凸轮机构(图号为PCZ3.0),
其传动路线为:
电机 带传动 凸轮 推杆,运动输出构件为推杆。
可检测凸轮及推杆的运动变化曲线。
7.轮传动机构(图号为PCZ7.0),
其传动路线为:
电机 带传动 齿轮传动 拨杆 棘轮,运动输出构件为棘轮。
可检测棘的运动变化曲线。
8.齿轮---齿条机构(图号为PCZ8.0),
其传动路线为:
电机 带传动 拨杆 大齿轮 齿条,运动输出构件为齿条。
可检测齿条运动变化曲线。
9. 链传动---齿轮传动机构(图号为PCZ9.0)
其传动路线为:
电机 带传动 小齿轮 中齿轮 大齿轮,运动输出构件为大齿轮。
可检测小齿轮及大齿轮的运动变化曲线。
10.不完全齿轮机构(图号为PCZ6.0)
其传动路线为:
电机 带传动 不完全齿轮 完全齿轮,运动输出构件为完全齿轮。











 工商网监
工商网监
评论