 电子发烧友App
电子发烧友App


一、 实验目的:
1、 掌握PID各校正环节的作用
2、 确定给定的系统PID的初始参数
3、 通过实验了解PID参数的变化对系统的影响
二、 实验原理
(一)PID调节器的输入输出关系:
式中:
为调节器的输出; 为误差输入; 为比例增益;
为积分时间; 为微分时间
(二)PID各校正环节的作用
在interwetten与威廉的赔率体系
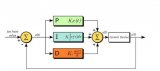
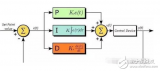
系统中,调节器最常用的调节规律是PID调节。常规PID调节系统一般由PID调节器和被控对象组成,其原理图如下:

PID调节是线性控制,将偏差的比例(P)、积分(I)、微分(D)通过线性组合构成调节量,对被控对象进行控制。
PID调节器各校正环节的作用如下:
1、 比例环节: 及时成比例地反映调节系统的偏差信号,偏差一产生,调节器立即产生调节作用,以减少偏差。
2、 积分环节:主要是为了消除系统的余差,提高系统的无差度。积分作用的强弱取决于积分时间常数,越大,积分作用越弱,反之则越强。
3、 微分环节:能反映偏差信号的变化趋势,并能在偏差信号变得太大之前,引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
(三)PID参数的变化对系统的影响
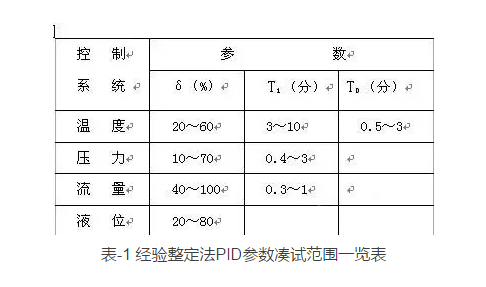
一般情况下,PID调节器本着稳、准、快的控制原则须对三个参数进行初始设定,同时考虑对象特性的多样性,控制指标的不同进行整定、优化才能取得满意效果。
在PID调节参数中,比例系数KP增大,会使调节阀的动作灵敏,运行速度加快。缺点是存在静差。在系统稳定的情况下,增大KP值,有利于减小稳态误差,提高控制精度。但随着KP增大,系统响应过程中的振荡次数会增多,调节时间加长。当KP值太大时,系统将趋于不稳定;若太小,会减低系统的响应速度。
引入积分的目的是为了消除静差,提高精度。但积分时间TI太小,在过程的启动、结束或大幅度增减设定值时,短时间内系统输出有很大的偏差,会造成PID运算的积分积累,致使控制量超出极限控制量,最终引起系统较大的超调,甚至造成系统振荡。积分时间TI太大时,积分作用对系统的性能影响减小,不利于消除系统稳态误差,难以获得较高的控制精度。
微分环节的引入,改善了系统的动态特性,对干扰特别敏感。但微分时间TD偏大或偏小时,都会使超调量增大,调节时间加长。
(四)PID参数确定的方法
在选择了调节规律及相应的调节器后,就要进行PID初始参数的确定。常采用的方法有临界比例度法(又称稳定边界法)、反应曲线法、衰减曲线法、仪表参数自整定法。
1、 临界比例度法:
调节规律采用纯比例,不断增加K,使调节系统的被调参数作等幅振荡(即达到稳定边界)时,测量出比例放大系数Km或临界比例度Pm以及振荡周期Tm,然后,按经验数据求出初始参数。
临界比例度法的调节器经验数据表
|
调节规律 |
P(%) |
TI |
TD |
|
P |
2Pm |
|
|
|
PI |
2.2 Pm |
0.85Tm |
|
|
PID |
1.7 Pm |
0.5Tm |
0.13 Tm |
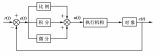
2、 反应曲线法:
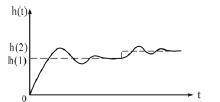
反应曲线法:要确定调节器的参数应先测定对象的动态特性,即对象输入量作单位阶跃变化时被调量的反应曲线,即飞升曲线。根据飞升曲线可得到等效滞后时间τ、等效时间常数T、广义对象的放大系数K。再按下表经验数据求出初始参数。
反应曲线法的调节器经验数据表
|
调节规律 |
P(%) |
TI |
TD |
|
P |
Kτ/T |
|
|
|
PI |
1.1 Kτ/T |
3.3τ |
|
|
PID |
0.85Kτ/T |
2τ |
0.5τ |
3、 衰减曲线法:
衰减曲线法:是参数整定要求达到衰减率为0.75的过程。先把调节规律采用纯比例(TI =∞,TD =0),观察调节过程的衰减比,通过改变比例度,使衰减比达到规定的0.75为止。记下此时的比例度PS和周期TS。然后,按经验数据得出初始参数。
衰减曲线法的调节器经验数据表
|
调节规律 |
P(%) |
TI |
TD |
|
P |
PS |
|
|
|
PI |
1.2PS |
0.85TS |
|
|
PID |
0.8PS |
0.3TS |
0.1TS |
4、 仪表参数自整定法:
现在许多仪表都带有自整定功能,利用此功能可以方便的整定出,PID参数。但是不是所有都会满足需要,有时可以在此基础上做修改,从而达到最佳效果。
三、 实验内容:
1、 通过临界比例度法确定PID参数:
1、将流量调节系统的调节规律社为纯比例,不断增加K,使调节系统的被调参数(流量)作等幅振荡(即达到稳定边界)。记录此时的比例度P和振荡周期Tm。
2、在给SDC31调节器通电在基本显示状态下,同时按ENT键和○▲键3秒;按○▼ 键显示PID;按ENT键显示P读取比例度读数;按ENT键,进入比例度的设置 ;按键○▲键修改比例度到合适的值。按ENT键,确定。
3、按DISP键退出设置。运行系统,观察曲线。
|
临界比例度法确定PID参数 | |||
|
临界比例度P |
|
振荡周期Tm |
|
|
调节规律 |
P(%) |
TI |
TD |
|
P |
|
|
|
|
PI |
|
|
|
|
PID |
|
|
|
2、仪表参数自整定确定PID参数:
先给SDC31调节器的供电,在AUTO和RUN下,启动自整定功能。
(1、)进入基本显示状态,按DISP键。
(2、)进入At(自整定)显示,按MODE键多次,直到显示At显示,再按ENT键。
(3、)改变设定值:按○▲键使0变为1.
(4、)确定改变设定值:按ENT键;At LED灯开始闪动,自整定功能启动;
(5、)恢复基本显示状态: 按DISP键,当自整定完成后,At LED灯熄灭。PID参数自动地写入仪表中。
(6、)读取PID参数。同时按ENT键和○▲键3秒;按○▼ 键显示PID;按ENT键显示P读取比例度读数;按○▼ 键显示I,读取读数;按○▼ 键显示D,读取读数,填入相应表格。
|
自整定法确定PID参数 | |
|
比例度 |
|
|
积分时间 |
|
|
微分时间 |
|
3、纯比例和比例积分条件下的PID控制
运行流量控制系统,调节规律采用纯比例。将上面整定的比例度输入到调节器,稍作修改。待系统稳定,记录比例度以及余差量。再加积分加入,使余差消除。并记录此时的积分时间。
|
纯比例和比例积分条件下的PID控制 | |
|
比例度 |
|
|
余差 |
|
|
积分时间 |
|
四、 问题与解答:
1、 已知某比例式气动调节器量程为100~200℃,当指针从140℃变化到160℃时,输出从0.5㎏/㎝2变到0.7㎏/㎝2,输出范围为0~1㎏/㎝2求比例度δ;若仪表的量程和输入变化量维持不变,问比例度为多少时,输出作全范围变化?
2、 当调节器的输入偏差信号e的波形如图所示变化周期等于积分时间,比例度为50%,分别画出调节器的比例、积分、比例微分输出的波形。

3、 试说明下列情况下,调节器的调节作用是增强还是减弱?比例微分调节器,保持比例度不变,微分时间由15秒上升到30秒。比例积分调节器,保持积分时间不变,比例度由20%上升到40%。













 工商网监
工商网监
评论