随着科技的不断进步,视觉体验成为了人们追求的重要方向之一。讯维光纤矩阵威廉希尔官方网站
作为现代科技的前沿代表,为提升视觉体验新高度提供了强有力的支持。 作为一种先进的信息传输威廉希尔官方网站
,讯维光纤矩阵利用光纤作为传输
2023-09-01 15:08:10 131
131 
FPC在加工过程中,为了满足电路设计的精度,生产切割时可以增加视觉定位检测系统,提高精度定位完成切割。
2023-07-07 13:38:18305 
,可以靠视觉导引、定位,成为夹取物件的要件。除了视觉定位,手眼力协调机器人的关键威廉希尔官方网站
还有矩阵的感测器,可以协助机器人知道抓取的位置与力量大小。 2.电子焊接制造 在焊线威廉希尔官方网站
中,因为芯片维度的缩小,需要较强大的影像放大功能
2023-06-29 11:35:27300 机器视觉检测与机器视觉定位是两种重要的机器视觉应用威廉希尔官方网站
,主要区别在于检测对象和应用领域不同。机器视觉检测威廉希尔官方网站
可以用于检测产品的外观、尺寸、密封性、移动对象、颜色缺陷、形状缺陷等,广泛应用于工业、医疗
2023-05-30 17:10:33449 摘要 高度精确且鲁棒的定位能力对于城市场景中自动驾驶车辆(AVs)至关重要。传统的基于视觉的方法由于光照、天气、视角和外观变化而导致定位丢失。在本文中,我们提出一种新型的视觉语义定位算法,它
2023-05-22 11:42:28348 
机器视觉检测是指在图像或视频中识别和定位具有特定特征的目标的过程,通常涉及目标识别、目标跟踪、目标分割等任务。它是机器视觉领域中最核心和最基础的威廉希尔官方网站
之一,具有广泛的应用前景。
2023-05-08 09:34:52209 基于三维模型的视觉定位通过在查询图像和三维模型间建立 2D-3D 对应关系,估计相机六自由度的位姿。传统的视觉定位方法通常采用人工设计的局部特征,如 SIFT,来实现 2D-3D 匹配,并结合图像检索威廉希尔官方网站
,将匹配范围限制在查询图像的可见区域,以适应大规模场景的需求。
2023-04-20 10:07:05572 机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位威廉希尔官方网站
有几种,不关心,只关心视觉的。
2023-04-20 09:57:33503 铁路转辙机视觉高精度定位抓取,高精度2D视觉大工件定位,既保证了较高的精度又降低了成本
2023-03-22 09:03:32248 深度网络在从大量数据中学习模式方面表现出色。另一方面,许多几何视觉任务被指定为优化问题。
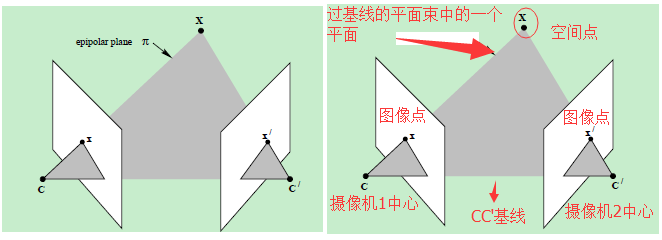
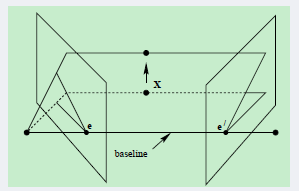
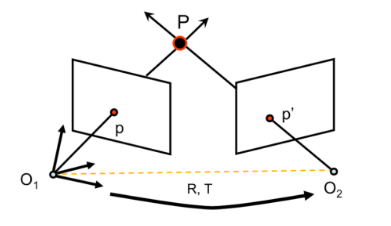
2023-02-06 16:46:09419 PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。
2022-12-22 09:25:41585 工业视觉定位系统为工业机器人搬运、分拣、码垛、装配等任务提供精确的作业目标位姿引导,适用于常见的目标类型和不同的应用需求,包括2D平面定位(3个自由度)、2.5D定位(4个自由度)和3D空间定位(6个自由度)。
2022-12-20 12:49:14459 依托机器视觉的机器人定位系统包含摄像机系统和控制系统。 其中摄像机系统中包括计算机(具有图像采集卡)、摄像机,主要收集视觉图像,并应用机器视觉算法。
2022-11-30 16:05:49451 基于视觉信息的定位是利用高清摄像头对定位周围的环境进行分析,通过对周围图像的处理和分析计算得到当前的位置信息。根据是否使用先验的视觉地图,可将视觉定位威廉希尔官方网站
分为基于视觉地图的定位与无先验地图的定位。
2022-11-14 10:18:34340 都是采用图案匹配威廉希尔官方网站
定位相机视场内的兴趣物品或特征,兴趣物品的定位往往决定机器视觉应用的成败,所以机器视觉应用前的准备工作至关重要。
2022-11-09 09:47:30672 在这几个领域中,一个最基本的算法就是产品识别和定位,比如视觉引导机器人,要在图像中识别出要抓取的产品,并定位出坐标,才引导机器人到指定的产品位置。
2022-10-11 15:38:46679 流水线CCD定位打标系统,视觉识别精度可以达到0.01mm
2022-07-05 14:27:031072 
本期课程我们将和大家一起分享如何去实现U盘视觉定位激光打标解决方案。
2022-06-27 15:36:231134 
怎样构造一个矩阵,它的指定位置元素为1,其他为0,比如A=[2,2,3,3,1]则构造一个B,它是3*5的矩阵B=[0,0,0,0,1;1,1,0,0,0;0,0,1,1,0]
2012-06-04 13:53:45
机器视觉图像处理软件对相机采集的图像进行缩放/平移/旋转等操作后,会改变原来采集图像中各区域的空间关系,这类操作就是图像的几何变换。
2022-02-16 12:02:58783 
基于计算机视觉的客机舱门识别与定位方法
2021-06-22 16:37:58 42
42 基于Harris-SIFT的缝料视觉定位系统综述
2021-06-22 16:05:0615 矩阵发光二极管
2021-05-18 15:29:275 3D视觉定位指的是根据事先构建的3D模型及相关信息,计算取得某张图像在拍摄时相机的位置和姿态。这是3D视觉的一项十分重要的威廉希尔官方网站
,可以用来帮助实现人员定位与导航。
2021-04-03 14:39:008516 
提出一种三目立体视觉外极线校正的快速算法.3个摄像机呈直角三角形配置,且已知摄像机透视投影矩阵。根据校正基本约束确定校正后的图像平面,利用图像不变形约束计算校正所需的三阶矩阵,用于在平面仿射坐标系下
2021-04-01 10:27:2912 工业视觉方案概述机器视觉行业在加速发展,随着几何尺寸、几何精度和光标的提高,产品定位精准的转变,工业4.0的确定方向,也为机器视觉行业注入新的活力。工业物联网加速发展,作为这个行业的重要组成部分
2021-01-25 11:28:471321 了大量创新性工作。不久前,视觉定位组提出的融合3D场景几何信息的视觉定位算法被ICRA2020收录,本文将对该方法进行介绍。 背景 1. 视觉定位算法介绍1.1 传统视觉定位算法 传统的视觉定位方法通常需要预先构建视觉地图,然后在定位阶
2020-11-13 10:50:054070 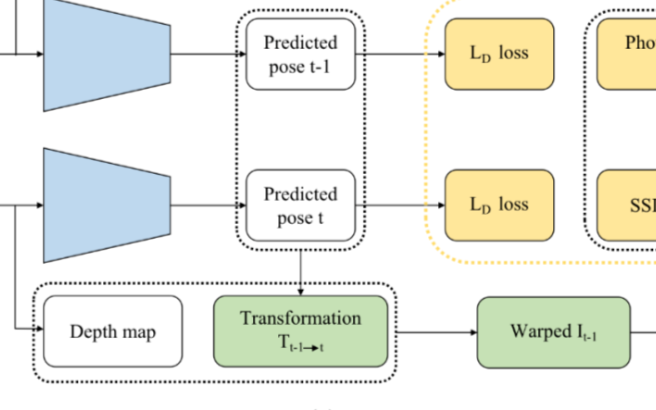
本文档的主要内容详细介绍的是CCD视觉定位软件NB-500智能视觉系统免费下载。
2020-05-27 12:15:0040 随着医疗器械水平的不断更新和提高,越来越多的生产厂商将机器视觉威廉希尔官方网站
引入实际生产中来,以达到提高生产效率,加强产品品质保障的目的。而利用机器视觉威廉希尔官方网站
,实现自动定位喷码便是机器视觉威廉希尔官方网站
在医疗器械领域
2020-05-22 15:08:091882 定位检测的呢? 体育器械视觉定位检测应用 测试内容:检测体育器械是否在正确的打码区域 检测要求:通过视觉检测定位体育器械高度,确定打码位置,检测出体育器械是否在正确的打码区域并发出报警信号。 测试原理:根据体育
2020-05-22 14:35:511452 SLAM(Simultaneous Localization And Mapping,同步定位与建图)的方式构建一个几何地图,然后在地图中进行路径规划和导航。在每一个时刻,无人车可以通过使用当前图像和地图比对的方式,或者采用视觉里程计的方式,估计当前相机的位姿进行
2020-04-28 08:00:007 本文档的主要内容详细介绍的是使用机器视觉进行刀具几何参数测量威廉希尔官方网站
的资料说明
2019-10-21 15:37:015 过程简化为对几何体的识别和抓放过程。利用边缘提取、滤波去噪、同心检测等算法,采用LabVIEW视觉模块及其库函数,进行了图像的预处理、特征提取以及中心点定位。研究结果表明,基于LabVIEW的Tripod机器人系统能够准确识别平台几何体的颜色和形状,可较为
2018-03-27 14:57:170 随着计算机视觉威廉希尔官方网站
的发展和硬件性能的快速增长,基于视觉的同时定位与地图创建威廉希尔官方网站
及其应用在过去10年里进展丰硕。民用硬件方面,高性能嵌入式计算设备的大量出现和廉价精确成像设备的小型化,已经可以支持在
2018-01-10 09:41:125 亟需解决的问题,一种实时的、能够准确判断疲劳状态的、不妨碍驾驶的疲劳检测系统成为国内外研究者的研究方向。 采用基于人脸分类器的Adaboost算法可以准确检测并定位人脸,然后通过尝试帧差法及几何特征法来定位人眼,提取人
2017-12-15 11:00:585 故障定位是软件调试过程中一项耗时耗力的工作,而自动故障定位威廉希尔官方网站
能够很好地与自动测试威廉希尔官方网站
相结合,对于提高软件调试效率具有重要的现实意义。提出了一种改进的基于交叉矩阵统计的软件故障定位威廉希尔官方网站
。该方法在故障
2017-12-01 14:15:370 针对轮式仓储物流机器人的自主定位问题,提出了一种基于视觉信标和里程计数据融合的室内定位方法。首先,通过建立相机模型巧妙地解算信标与相机之间的旋转和平移关系,获取定位信息;然后,针对信标定位方式更新
2017-11-28 10:16:420 单目标跟踪是计算机视觉的重要组成部分,其鲁棒性一直受到目标遮挡、光照变化、目标尺度变化等因素的制约。针对这个问题,提出了基于低秩投影中稀疏误差矩阵分析的视觉跟踪算法。为了克服模板漂移对跟踪
2017-11-21 16:15:423 Tonti 图揭示并高度概括了多种物理场所共同具备的数学结构,为求解不同物理场提供相同的拓扑算子以构建刚度矩阵。离散几何法是基于离散空间中互为正交的原始和对偶网格,利用其几何尺度直接导出本构矩阵
2017-10-28 12:06:220 。那么,在现有SLAM威廉希尔官方网站
中,机器人常用的定位导航威廉希尔官方网站
有哪些呢? 视觉定位导航 视觉定位导航主要借助视觉传感器完成,机器人借助单目、双目摄像头、深度摄像机、视频信号数字化设备或基于DSP的快速信号处理器等其他外部设备获取
2017-09-19 16:08:3630 基于视觉定位的机器人搬运威廉希尔官方网站
及应用_田鑫
2017-03-04 18:03:515 基于瞳孔定位威廉希尔官方网站
的视觉跟踪系统的研究_张琴
2017-03-04 18:03:511 基于图像雅可比矩阵的智能机器人视觉跟踪!资料来源网络,如有侵权,敬请见
2015-11-30 11:32:5511 摘要: 针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列, 然后在分析二次成像法获取目标深度信息的
2012-06-18 14:34:472177 
利用矩阵理论和统计信号处理理论, 推导了由于时差、卫星自定位和卫星速度等测量误差产生定位误差几何稀度( GDOP) 公式。并以四星为例,在地固坐标系模型下给出了仿真结果。仿
2011-11-02 14:35:5321 在多投影仪曲面显示墙几何校正中需要用数码相机捕获图像反馈信息。为了方便准确地定位到每台投影仪的投影幕,提出并实现了一种数码相机自动定位的方法。该方法利用固定
2010-01-25 14:56:1317 本文提出了一种双目立体视觉的几何解法,通过分别获取场景中某物体在左右摄像机中投影点的实际像素坐标,利用标定得到的摄像机内参数,求得投影点的理想图像坐标。然后
2009-12-30 17:01:1914 本文提出一种基于Shape Index 特征和几何约束的三维人脸标志点定位方法。首先通过曲面拟合计算模型的连续Shape Index 特征,对Shape Index 特征进行阈值分割和区域标记,然后由统计
2009-12-19 13:56:4228
发光二极管矩阵驱动电路
2009-04-20 11:20:451064 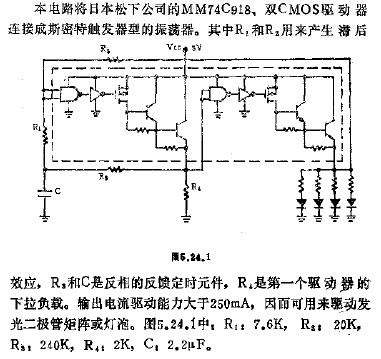
应用AutoCAD几何计算器实现快速定位 几何计算器是AutoCAD R12提供的一个十分有用的工具。和普通的计算器一样,几何计算器可以完成+、-、*和/的运算
2009-02-14 17:08:101336
发光二极管矩阵驱动电路
2009-01-17 14:01:132325 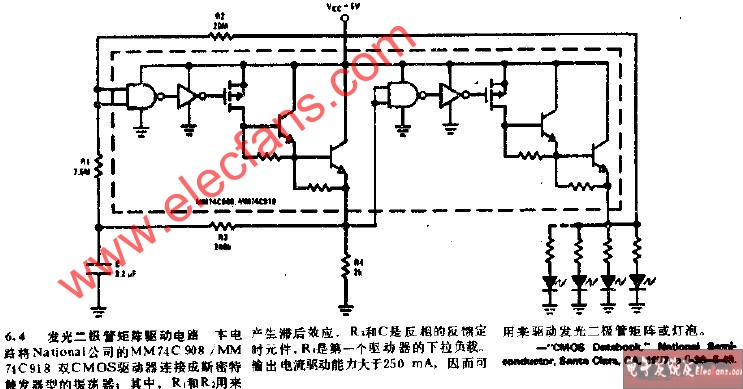
GPS定位的几何关系图
2008-08-06 17:40:321238
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论