。其中,伺服电机被称为“工业机器人的心脏”,成本占比约35%,一般安装在机器人的“关节”处,为工业机器人提供精准的控制效果。伺服电机广泛应用于先进制造业,替代需求+新
2023-08-14 09:51:44 350
350 
泰科伺服生产的MT无刷伺服系统主要由IDM系列伺服驱动器与兼容NEMA法兰尺寸的直流无刷伺服电机组合而成。采用直流供电,最大功率可达600W,主要应用于小型移动机器人、自动化检测组装、医疗设备等行业
2023-04-20 10:45:52
定位, 且转动惯性小,动态响应快。主要应用包括自动化生产线,机器人关节,机器人关节、医医疗仪器及设备、精密仪器和工业控制系统,以及其他许多的应用。
2023-04-20 10:07:10
RDM协作机器人关节伺服驱动模块是一款基于FPGA 先进威廉希尔官方网站
开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen 总线控制
2023-04-19 15:39:40
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
工业领域之中。 发展历史编辑 播报20世纪50年代末,工业机器人最早开始投入使用。约瑟夫·恩格尔贝格(Joseph F.Englberger)利用伺服系统的相关灵感,与乔治·德沃尔(GeorgeDevol)共同开发了一台工业机器人——“尤尼梅特”(Unimate)
2023-04-19 10:54:061002 RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
定位, 且转动惯性小,动态响应快。主要应用包括自动化生产线,机器人关节,机器人关节、医医疗仪器及设备、精密仪器和工业控制系统,以及其他许多的应用。
2023-04-18 17:35:19
产品优势专注机器人关节研发,RJS系列关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS关节模组集成无框电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS关节
2023-04-18 14:04:34
RDM协作机器人关节伺服驱动模块是一款基于FPGA 先进威廉希尔官方网站
开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen
2023-04-17 18:13:06
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 16:12:03
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
工业机器人的基础知识工业机器人是能模仿人体某些器官的功能(主要是动作功能)、有独立的控制系统、可以改变工作程序和编程的多用途自动操作装置。 工业机器人在工业生产中能代替人做某些单调、频繁和重复
2010-05-18 22:03:02
完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。 直坐标机器人 直坐标机器人控制系统 关节机器人 关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最
2022-11-02 14:59:561339 
工业机器人大体上分类为线性机器人(又叫直角坐标机器人)、多自由度机器人(又叫多关节机器人)、并联机器人(又叫deltaΔ机器人)和水平多关节机器人(又叫scara机器人)。由各种类型的关节机械手臂和自动化传输设备结合而成的自动化岛。不同功能的自动化岛链接而成自动化线,不同的自动化线结合组成自动化车间。
2022-11-01 14:34:211513 电子发烧友网站提供《Arduino和微型伺服系统制作的机器人.zip》资料免费下载
2022-10-19 09:12:33 0
0 工业机器人有4大组成部分,分别为本体、伺服、减速器和控制器。而其中,工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。
2022-09-09 14:21:381478 电子发烧友网报道(文/李宁远)在机器人行业里,伺服驱动是一个老生常谈的话题了。随着工业4.0的加速更迭,机器人的伺服驱动也随之升级。现在的机器人系统既要求驱动系统能控制更多的轴数,还要能实现更多
2022-08-25 08:10:002865 
PLC的工业机器人关节直流伺服系统(安徽力普拉斯电源威廉希尔官方网站
有限公司湖州地区电话)-文档为PLC的工业机器人关节直流伺服系统总结文档,是一份不错的参考资料,感兴趣的可以下载看看,,,,,,,,,,,,,,
2021-09-17 15:54:5813 机器人关节伺服控制系统设计与仿真
2021-06-22 14:53:1033 机器人关节是机器人各个零部件之间发生相对运动的机构。关节之中,单独驱动的为主动关节,反之称为从动关节。机器人关节模组通常采用超声波电机、伺服电机、谐波减速器、VR减速器、行星齿轮箱电机等。 机器人
2021-06-13 10:00:008948 机器人关节是机器人各个零部件之间发生相对运动的机构。关节之中,单独驱动的为主动关节,反之称为从动关节。机器人关节模组通常采用超声波电机、伺服电机、谐波减速器、VR减速器、行星齿轮箱电机等。
2021-05-28 09:11:441 目前,工业机器人关节主要是采用交流伺服系统进行控制,本研究将威廉希尔官方网站
成熟、编程方便、可靠性高、体积小的SIEMENS S-200可编程控制器 ,应用于可控环流可逆调系统,研制出机器人关节直流伺服系统,用以对工业机器人关节进行伺服控制。
2021-04-11 08:51:009677 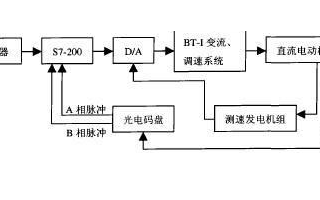
本文对机器人视觉伺服威廉希尔官方网站
进行了综述,介绍了机器人视觉伺服系统的概念及发展历程和分类,重点介绍了基于位置的视觉伺服系统和基于图像的视觉伺服系统。对机器人视觉所涉及的前沿问题做了概括,并指出了目前研究中所存在的问题及今后发展方向。
2021-04-08 09:11:5310893 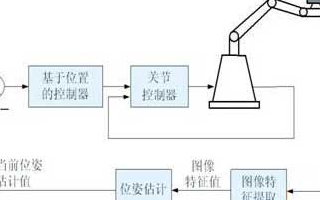
零部件研发制造主要包括伺服系统、减速器和控制器等,占工业机器人成本的70%左右。减速器、伺服系统(包括伺服电机和伺服驱动)及控制器直接决定工业机器人的性能、可靠性和负荷能力,对机器人整机起着至关重要的作用。 中游是工
2021-03-29 10:57:183266 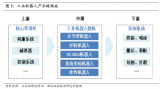
《2019年全球工业机器人伺服电机行业报告》预计到2019年,中国市场对伺服电机的需求将达到18.2万台。 伺服系统是工业机器人的必不可少的关键零部件,是利用各种电机产生的力矩和力,直接或间接地驱动机器人
2020-06-12 14:52:431150 什么是工业机器人伺服系统?
2019-05-04 08:57:004639 
机器人视觉伺服系统是机器视觉和机器人控制的有机结合,是一个非线性、强耦合的复杂系统,其内容涉及图象处理、机器人运动学和动力学、控制理论等研究领域。随着摄像设备性能价格比和计算机信息处理速度的提高,以及有关理论的日益完善,视觉伺服已具备实际应用的威廉希尔官方网站
条件,相关的威廉希尔官方网站
问题也成为当前研究的热点。
2019-05-03 10:32:003214 从市场情况来看,2018年交流伺服系统市场规模增速下滑明显,而工业机器人用伺服系统的需求规模逐年增加,且工业机器人专用伺服占交流伺服系统市场比重逐年上升。
2019-04-29 09:10:066833 
和伺服机构控制的重要部分。因而要了解机器人的运作过程,必然绕不过伺服系统。 伺服系统 伺服系统是以变频威廉希尔官方网站
为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。
2018-07-10 01:04:0024526 的“大脑”;伺服系统主要以伺服电机为主,相当于机器人的“神经系统”;减速器则是威廉希尔官方网站
壁垒最高的领域,往往安装于运动关节处。
2018-07-02 15:50:002346 
对工业机器人的总体结构和设计要求进行缝隙,对伺服控制系统和工业机器人的驱动特点进行了论述,确定工业机器人驱动采用全数字交流伺服控制系统,完成伺服电机和驱动器的研究。
2017-10-13 17:34:2712 针对用于激光焊接的关节型工业机器人运动误差控制问题,根据关节型工业机器人伺服控制和运动学原理,分析了机器人运动误差的积累过程,并对运动误差和伺服系统误差分别进行了测量和比较。结果表明,伺服系统误差是运动误差的重要组成部分。该结论对机器人激光焊接的路径控制具有一定参考意义。
2017-10-12 18:19:066 随着工业自动化的发展,越来越多的领域开始使用工业机器人代替人力。对于机器人制造商和机器人消费者而言,选择合适的伺服电机始终是一项艰难的任务。机器人的关节驱动离不开伺服系统,关节越多,机器人的柔性
2017-09-29 11:45:344 机器人视觉伺服系统是机器人领域中的重要研究方向,起源于80年代初,随着计算机威廉希尔官方网站
、图像处理威廉希尔官方网站
、控制理论的发展,取得了很大进步,有一些系统已投入使用。视觉伺服跟通常所
2011-10-08 16:04:421779 基于PLC研制的直流伺服系统,利用PLC扩展能力强的特点,添装手动输放装置,实现工业机器人关节直流伺服系统的可视操作。
2011-05-11 10:13:403950 
基于MatlabRTW 的机器人伺服系统设计方案:机器人伺服控制系统是非线性多变量的控制系统,这给系统的开发提出了更多、更复杂的问题,使得机器人控制系统的开发困难.文中提出一
2009-10-06 10:12:0334 机器人视觉伺服系统是机器人领域一项重要的研究方向,它的研究对于开发手眼协调的机器人在工业生产、航空航天等方面的应用有着重要的意义。本文针对机器人视觉伺服系统的
2009-05-30 11:34:0127
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论