 电子发烧友App
电子发烧友App


基于PLC的物料定量给料系统的设计
针对传统控制中存在的自动化程度低的问题,开发研制了基于PLC的PID控制算法的物料定量给料系统计量装置,阐述了该控制系统的结构及PLC的硬件组成;根据工艺过程的威廉希尔官方网站
要求,从控制系统的硬件配置到应用程序的设计,系统地考虑了工业物料定量给料过程的实际情况。应用结果表明该系统性能稳定、运行可靠、人机界面直观灵活,控制系统实现的各项功能均满足工艺要求,取得了良好的应用效果。
关键词:配料系统 计量装置 可编程控制器 变频
引言
在生产领域中,各种原料之间的配比精度对生产过程的稳定和产品的质量、产量有重要的影响。定量给料系统已广泛应用于水泥建材、冶金化工、电力煤炭等行业粉体连续输料的流量测量与定量给料的工业环节,如水泥厂人窑煤粉的定量给料及输送就是一个典型的例子,其供料过程中的稳定性、均匀性等问题是影响计量精度的主要因素。由于它用途广泛,对提高给料系统的自动化程度就有着重要的现实意义。
本文 的 物 料定量给料系统是根据国内外智能配料系统的发展状况和趋势,结合企业提出的具体要求的基础上设计的配料系统计量装置;它采用可编程序控制器作为整个控制系统的核心,具有原理先进、结构简单、给料均匀可靠、测量准确等特点。
1 系统结构及设计
可编程控制器在机电一体化产品中应用范围极广,其主要特点是:工作可靠、可与工业现场信号直接输人输出连接、组合灵活、编程容易、安装简单、维修方便、运行迅速,为继电器逻辑控制所望尘莫及。
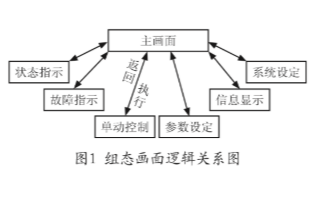
该计量装置控制对象和参数多,工作条件恶劣,且要求具有一定的管理功能,为提高系统的可靠性,便于维护 ,拟采用以可编程控制器为核心,以触摸屏计算机作为交互界面,配以各种输人输出专用模块和专用信号调理电路组成一个完整的控制系统。系统总体结构如图1所示。
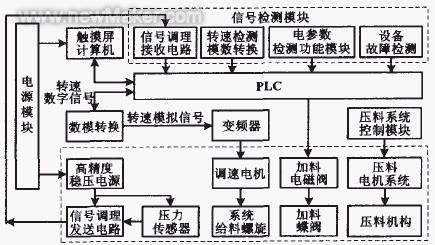
图1 系统总体结构框图
1.1 系统测控时序
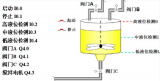
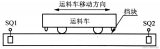
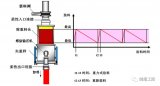
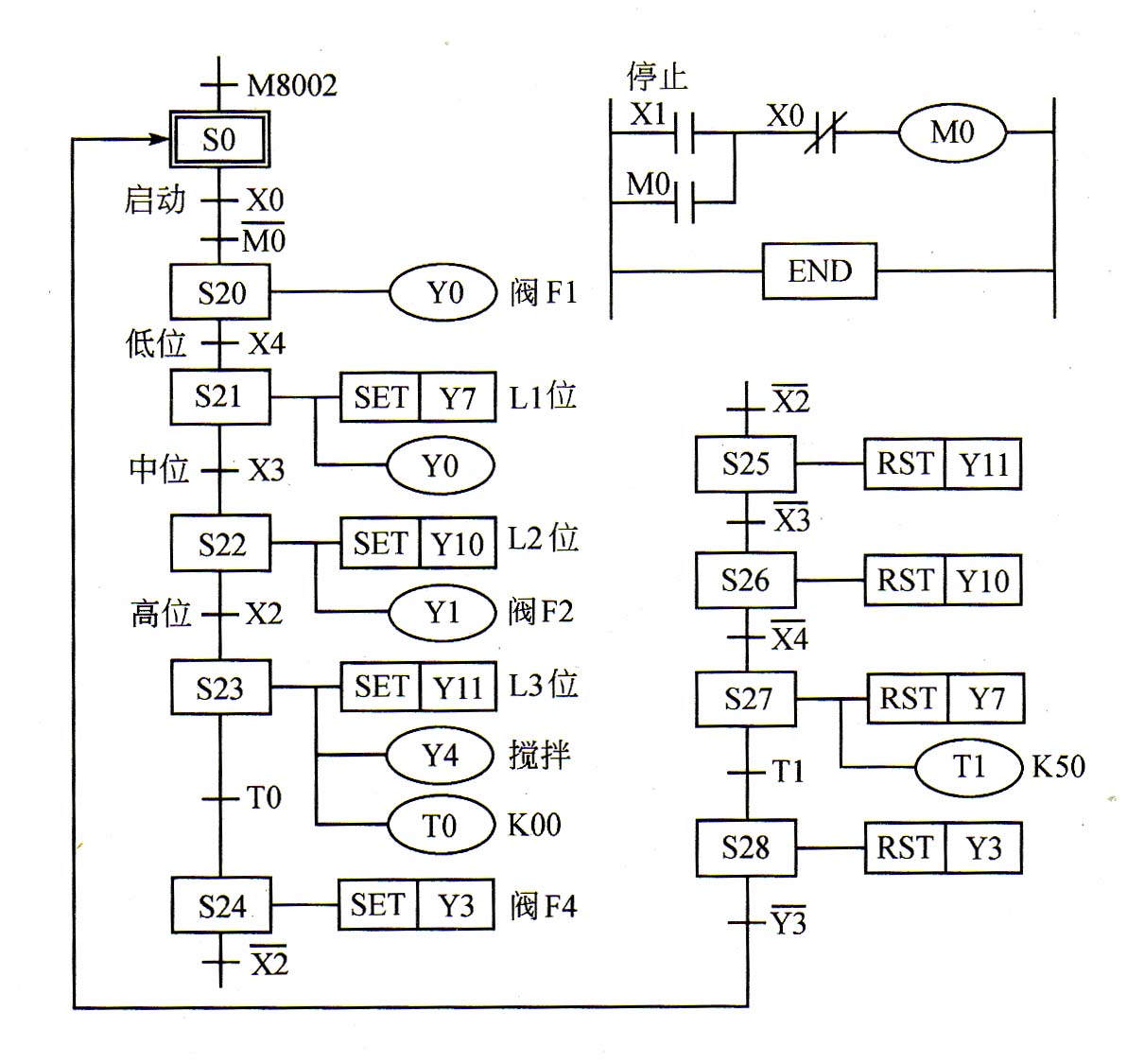
系统测控时序图[3」如图2所示。系统在料位最低点①时,控制输出装料生成指令,装料阀接受打开指令后打开,系统进人体积给料期。经过一个时间延迟后,装料阀全部打开,并发出装料阀全开反馈信号给控制系统,经过一个设定的时间延迟后,硫化空气打开,系统进人快速加料阶段。当物料加到料位最高点④时,称重系统检测到料斗满料信号而输出装料阀关闭指令,装料阀接受指令开始关闭,系统运行到装料阀全关点⑤时,输出蝶阀关闭信号,到此系统装料过程结束,进人出料阶段。经过一段稳定时间后系统运行到重量给料开始点⑥,此时体积给料结束,系统进人到重量给料阶段,测量和控制周期开始,持续到给定的下一个料位最低时,系统又发出装料控制的指令。以此循环交替进行给料作业。

图2 控制系统时序图
图2中,在点②处装料阀全开、点③处硫化空气阀打开①-⑤为系统加料周期,同时装料和出料;⑤-①为出料周期,系统只有出料;①-⑥为体积测量方式,此时出料量只是速度控制;⑥-①为重量测量方式,测量和控制的阶段。
1.2 计最装置电气控制系统
计量装置电气控制系统由上位机系统和下位机系统两部分构成。
1.2.1 上位机系统
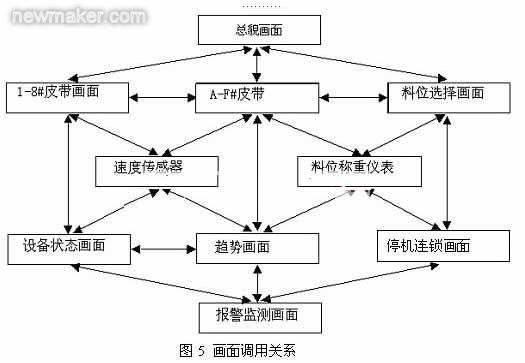
触摸屏计算机作为上位机,主要实现监督控制级和管理级的功能。及时处理用户的输人指令并显示运行信息。由于触摸屏计算机自带了与PLC通信的功能,而不用编写专用的通信程序,只要设计良好的界面,使用十分方便。
1.2.2 下位机系统
下位机系统主要由以下几部分组成:
① 可编程控制器。可编程控制器是下位机系统的控制中心,一方面担负着与上位机的通信功能;另一方面根据上位机的指令,控制各执行机构的动作。考虑到系统的负载情况和控制的需要,选用了三菱公司的FR -540 -5.5K-CH的变频器。其输出额定功率为9.1 kV,适应的电机为5.5 kW。控制方式为柔性PWM (V/F控制)。运行频率的输出控制由interwetten与威廉的赔率体系
量进行(0一5 V),此模拟量值由PLC的2D/A模块给定。
② 接收调理电路。接收现场传送来的差分信号并将其转换成开关信号后送给PLC的高速计数器计数。
③ 转速检测模数转换电路。将电机运行的速度转换成数字量送给PLC。
④ 电参数检测功能模块。将电机运行的电流、功率、效率等转换成数字量并经铭5接口送给PLC和上位机。
⑤ 数模转换功能模块。将经PLC计算后的转速控制数据转换成模拟信号送给变频器以控制下料电机的转速,从而达到给料量控制的目的。
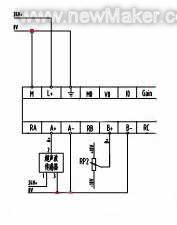
⑥ 重量检测模块。称重传感器是传统的电阻应变式压力传感器,采用的是ET一3型压力传感器。但其输出范围只有0一21.6 m V(供电电压为直流12V ),输出电阻为351 Sl,无法直接采样进行A/D变换。采用了AD623芯片将此信号放大50倍。
1.3 机械本体与机电接口
现场 部 分 主要是机电一体化的执行机构,主要包括机械本体、动力部分、测量传感部分、执行机构、驱动部分等要素,各要素之间通过接口相联系。
① 加料电磁阀及蝶阀。由PLC的输出继电器的闭、合,来控制加料电磁阀的通断,通过该执行机构实现料斗中物料间隙自动加人。
② 测量传感部分。对系统运行中所需要的重量信息进行检测,变成电信号,经信号调理电路处理后以差分信号发送到控制室。
③ 粉料输送螺旋及驱动机构。它是系统的主要执行机构,通过它的运行,实现物料的进给。该螺旋主轴以变频电动机为动力,通过一级摆线针轮减速器减速后拖动主轴运行,变频电动机的运转速度由变频器控制。
④ 粉料压实及驱动机构。它是系统物料的主要执行机构,通过它的运行,实现物料的压实。该机构以电动机为动力,通过二级摆线针轮减速器减速后拖动压料机构运行。
2 可编程控制器PID算法[5]
PID 控 制 具有原理简单、使用方便、适应性强、鲁棒性强等特点,计量装置利用PLC的控制计算能力取代模拟调节器,直接通过数字运算,使被调量保持在给定值。系统PID算法如下:

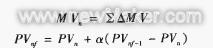
式中:EVn为当前偏;Dn为微分运算值;EVn-1为前一次偏差;Dn_1为上一次微分运算值;SV为设定值;KP为比例常数;PVn为当前采样值;α为输人滤波常数;PVnf为当前滤波输人值;Ts为采样时间;PVnf-2为前一次当前滤波输人值;T1为积分时间;PVnf-2为前二次当前滤波输人值;Td为微分时间;△MV为操作值的变化;KD为微分增益;MVn为当前输出操作值。
当前滤波器输入值PVnf大于设定值时,执行正作用PID算法,反之执行反作用PID算法。
PID指令的许多参数都可以由用户根据自己的需要设置或设定,从控制开始到PID循环达到装置控制要求的困难是找到一个好的控制起始点。调节PID值时一定要保证操作的安全性,以避免对设备的损坏。对FX2 N系列PLC可以进行预调节以便为PID控制过程快速赋初值。一个简单的方法就是每次改变固定比例的参数值,如每次增加或减少10%。
3 结束语
计量装置根据人机工程学的原理进行计量装置界面设计,采用彩色液晶显示和专门的机柜设计,以保证操作的方便和正确;以PLC为控制中枢,以螺旋输送等为物料的推进器,配以相关的执行驱动器件,使系统可自动运行。整个系统给料量进行闭环控制,采用面向对象的编程方法,和面向过程的编程方法相结合,进行优化的接口和流程设计,可以方便地进行功熊扩展;并且具有远程通信接口,在需要时可以组成网络,以适应工厂现代化发展的需要,配料精度达到0.5%级。该装置已在企业应用,运行状况良好。
参考文献
1 郑志民.配料控制器在饲料工业中的应用.自动化仪表,200 2 ,23 (2);38一40.
2 宋德玉可编程控制器原理及应用系统设计.北京:冶金工业出 版社,2001.
3 谢嵘,张芥凡,田作华.饲料生产中称重仪表的设计与实现lil .自 动 化仪表,2003,24(12);3 6-38.
4 张立勋,孟庆鑫,张今瑜.机电一体化系统设计[M].哈尔滨:哈尔滨 工程大学出版社,1997:80-100
5 张宝芬.自动检测威廉希尔官方网站
及仪表控制系统 北京:化学工业出版社,2000:110-150.
王亚平,男,1964年生,2005年毕业于浙江工业大学机械工程专业,获硕士学位,实验师;主要研究方向为电机及其控制实验研究,机电一体化
























 工商网监
工商网监
评论