“ 总线关闭(bus off)是CAN节点比较重要的错误处理机制。那么,在总线关闭状态下,CAN节点的恢复流程是怎样的?又该如何理解节点恢复流程的“快恢复”和“慢恢复”机制?本文将为大家详细分析总线
2020-08-04 11:16:00 13380
13380 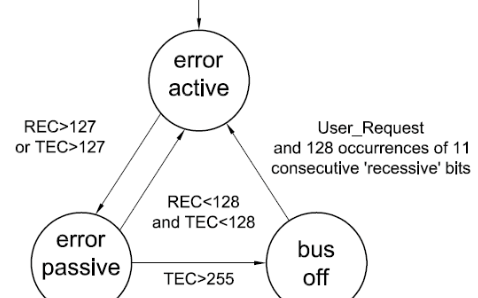
CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。
2022-07-22 09:32:11570 CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。另外不同于传统的网络(比如USB或者以太网),CAN节点与节点之间不会
2022-11-02 10:18:13463 为了防止故障节点干扰甚至阻塞整个CAN网络系统,CAN协议实现了复杂的故障限制机制。为了保证通信的正常,CAN 2.0 总线协议总线中各节点需要采取以下措施进行错误检测。
2022-11-08 17:12:447486 CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。另外不同于传统的网络(比如USB或者以太网),CAN节点与节点之间不会
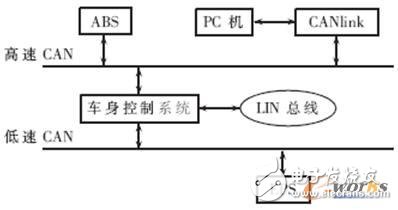
2023-01-13 09:25:10768 在ISO 11898-2和ISO 11898-3中分别规定了两种CAN总线结构(在BOSCH CAN2.0规范中,并没有关于总线拓扑结构的说明):高速CAN总线和低速CAN总线,区别表如下所示。
2023-04-07 09:30:181836 
为了防止故障节点干扰甚至阻塞整个CAN网络系统,CAN协议实现了复杂的故障限制机制。为了保证通信的正常,CAN 2.0 总线协议总线中各节点需要采取以下措施进行错误检测:
2023-06-21 17:14:181840 
这意味着变送器通过CAN收发器改变总线电平,并将其信息传输到CAN总线。接收器通过监测总线电平将总线上的信息读取到自己的CAN收发器中。
2024-02-19 14:53:54606 
配置如下时,调度算法就会变成不带时间片的抢占式调度
2024-03-21 13:46:18372 
CAN总线最初是由德国BOSCH公司于20世纪80年代初提出的,当时主要应用于汽车电气通信,它将汽车上各种信号的接线只用两根简洁的电缆线取代,而各种电子装置通过CAN控制器挂到这两根电缆上,设备之间
2019-09-30 07:56:24
CAN总线虽然有强大的抗干扰和纠错重发机制,但目前CAN被大量应用于比如新能源汽车、轨道交通、医疗、煤矿、电机驱动等行业,而这些场合的电磁环境比较严重,所以如何抗干扰是工程师最为关心的话题。假如有一
2021-09-03 08:39:24
总线的总线仲裁机制是我觉得设计的非常精妙的,下面总结几个CAN总线的特征点,这几个特征点对理解CAN的总裁机制非常重要。1、CAN总线在物理层上只有两根线CANH和CANL,根据两根线的的电位差来...
2021-08-20 06:08:03
现场总线VS工业以太网现场总线CAN总线(Control Area Network)一、CAN总线是什么?CAN总线的作用?CAN总线的优点CAN总线拓扑图各接口协议速率对比
2021-08-06 07:44:19
控制器区域网(Controller Area Metwork,CAN)总线是一种多主机局部网。CAN总线规范已被国际标准化组织(ISO)制定为国际标准。C-AN总线属于总线式串行通信网络,由 于采用
2011-07-12 15:33:41
和接收错误计数,计数达到一定的累计以后就会产生CAN BUS OFF, 这说明CAN总线上出现了严重的错误。如下图CAN总线产生错误后的状态转换机制如果出现了BUS OFF,总线上的节点需要做一些动作
2022-01-14 06:55:10
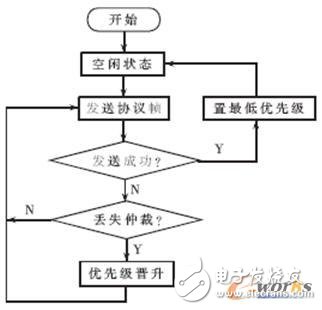
CAN通讯总线竞争数据保护物理设计总线逻辑错误检测机制总线逻辑错误处理机制错误跟踪机制POWER PC芯片 CAN配置总线竞争总线竞争解决的是在同一时间,多个节点同时向总线发送消息的问题。解决的方法
2022-01-13 06:16:09
can总线的可靠通信是依靠什么机制来实现的?
2023-05-09 10:35:22
我看官方手册说设置时configMAX_PRIORITIES不能超过32,有没有谁试过改成255的或者更大的,小弟改了几下都不行!还有能问问FreeRTOS的任务调度算法和RT_Thread的不一样,RT_Thread的算法和uCosIII的调度算法一样呢?
2020-06-18 09:00:40
大家好,我想像大多数人一样,我忽略了勘误表,直到为时已晚。我知道 stm32f4 和其他一些不为 TTCAN 提供硬件支持,据我所知,这是 2 级 CAN(全球时间同步)。我搜索了论坛,虽然确实出现
2022-12-06 07:41:23
1 前言传统CAN 采用事件触发消息传输机制,CSMA/ CD+ AMP( Carrier-Sense Mult iple Access w ith Co llision Detect ion
2018-03-20 13:50:04
UCOS之任务调度机制
2013-05-30 07:56:22
引入一种比较机制来执行多处理器间的负载平衡.当VCPU调度时,将就绪VCPU迁移到总运行时间最少的处理器上.仿真实验结果表明:IEDF调度算法性能有较大的提升【关键词】:SMP;;SEDF;;负载平衡
2010-04-24 10:03:16
对多点及全局广播等几种方式传送数据,无需专门的调度。• CAN 总线的数据采用短帧结构,传输时间短,受干扰概率低,具有极好的检错效果。• CAN 总线采用 CRC 检验并可提供相应的错误处理功能,保证了
2018-12-13 14:26:31
本人明年毕业,最近在关注几家IT企业做准备。目前考虑最多的哪些IT企业的晋升机制比较快比较灵活?特向有经验的前辈求教相关信息。以前实习去过一些老式的IT企业,比较古板,论资排辈比较严重,个人能力得不得发挥,比较受不了这样的。
2011-09-23 10:05:12
关于CAN总线位定时和同步机制的简要分析
2021-05-28 06:05:24
`我们都知道CAN 总线以其可靠性高、成本优等特点在汽车、工业局域通讯得到广泛应用。但是随着各种专用控制器的蓬勃发展,控制功能的需求逐渐复杂多样化,随之带来的是各控制器之间的交互也日趋复杂。CAN
2019-12-19 15:09:07
系统同样的可靠性,需要通信系统有更高的确定性与冗余度。CAN达不到这一确定性要求,所以要改进。当然,新的协议不能在性能上比CAN还差。 通过时间触发协议,使消息在调度好的时间片内发送,可以消除总线的争
2011-04-22 08:59:28
怎样利用时间片轮转调度算法去实现同步时间调度的程序呢?
2021-12-20 06:16:11
CAN总线的实时性能非常必要。于是,传统CAN与时间触发机制相结合产生了TTCAN(Time-Triggered CAN)。 TTCAN总线和传统CAN总线系统的区别是:总线上不同的信息定义了
2015-06-24 13:56:39
如题,大家知道485总线是主从式结构,靠主机轮询每个节点通讯。CAN总线则因为有防冲突仲裁机制,每个节点都可以主动和主机通讯。那么485能不能模拟CAN也搞个总线仲裁呢?
2019-09-25 06:45:28
针对多任务系统而言,调度是指根据一定的算法.将CPU 分配给符合条件的任务使用,不同的系统任务调度机制不同。本文介绍VxWorks系统的任务调度策略和算法.分析优先级倒置产
2008-12-16 14:11:26 10
10 基于CAN总线的变电站及调度主站远程监控系统介绍了基于CAN总线的变电站及调度主站远程监控系统的基本原理和软件构成,实现了多传感器的监控与分布式处理。
2009-03-19 13:32:5015 根据控制局域网络(CAN)的特点及应用要求,提出一种新的动态调度协议(DSP),通过动态选择时间间隙调度信息,同时考虑实时数据的重传机制,并在此基础上介绍基于CAN 总线的实
2009-03-30 10:24:5026 提出改进的自适应粒子群优化算法(MAPSO),引入种群熵判断粒子群优化算法(PSO)是否陷入局部最优,动态改变算法惯性权重,并将该算法用于单个水库的优化调度。建立水库优化调度
2009-04-20 10:00:378 针对网格任务调度的动态特性,提出一种改进的遗传算法——动态遗传算法(DGA),设计了新的编码机制和适应度函数,以及相应的选择、交叉和变异算子。根据网格系统各服务节点的
2009-04-22 08:40:4918 基于Multi-Agent提出了一种新的分布式测控系统动态任务调度算法。该算法采用接收者启动的调度策略,根据各主机负载状态,在系统运行过程中动态迁移任务,有效地提高了系统效
2009-05-16 11:35:4315 为增强实时操作系统的防危性,在分析现有调度机制的基础上,探讨了最大关键度优先的调度算法,该算法是一种混合型的优先级实时调度算法,由静态优先级、动态子优先级和
2009-05-16 11:52:2110 本文基于已有的OPC Server 实时任务模型,设计了处理混合任务集的动态调度算法(基于截止期优先)和实现方式。该算法实现了对混合任集可调度性的判断,可以完成有硬实时性要
2009-05-31 15:36:1613 本文以功率因素动态补偿系统为对象,介绍了CAN 总线威廉希尔官方网站
在配电自动化系统中的一个应用实例:PC 机作为上位机,各个补偿系统作为智能节点,通过CAN 总线进行高速通讯。CAN 总线
2009-06-16 10:35:3821 陀螺是一种应用广泛的惯性器件,而陀螺动态测试系统是重要的研究课题,首先提出了采用CAN总线作为数据通讯方式,DSP作为各智能节点的主控制器来构建陀螺动态测试系统,然后
2009-07-10 16:12:2913 本设计为光电稳定跟踪平台开发CAN 驱动,以实现CAN 总线上设备间的通信。分析了linux 下标准设备驱动机制和CAN 总线通信模型,给出了光电稳定跟踪平台中CAN 总线通信的硬件设计
2009-08-04 08:33:4830 TTCAN 是基于CAN 的时间触发的高层协议,具有确定性行为,因而适用于安全相关的场合。本文首先从参照时间、基本周期、系统信息阵、网络时间单元和全局时间五个方面对TTCAN 协议
2009-08-05 10:06:4651 为了优化CAN 通讯协议的实时性,通常有两类方法。第一类是在原有CAN 事件触发协议的基础上对总线仲裁方式做一些改进;第二类是采用时间触发的TTCAN 协议。本文搭建了实验平台,
2009-08-07 08:34:1736 本文提出了一种新的VoIP业务流调度机制(RR-RED),通过随机早期检测(RED)和轮循机制(Round Robin)控制主动丢包。该机制很好的继承了RED算法的优点
2009-09-03 08:58:037 为适应网络的动态性,提高调度公平性和资源效率,流感知优先公平调度机制需要动态的多业务区分转发。与链路负载状态相关的模糊流感知能够实现路径上的一致性业务区分,而
2009-11-24 14:16:3712 针对多任务系统而言,调度是指根据一定的算法.将CPU 分配给符合条件的任务使用,不同的系统任务调度机制不同。本文介绍VxWorks系统的任务调度策略和算法.分析优先级倒置产生
2009-11-27 16:26:4113 对于电厂高可靠性系统,现场总线控制系统的安全性还有进一步改进的要求。TTCAN是基于传统CAN总线的一种高层协议,其通信是基于时间触发的,因而适用于安全相关的场合。本文主要对
2010-07-14 14:40:5449 针对在控制器局域网(CAN) 总线中应用最早截止期优先( EDF) 调度时,CAN 帧用有限的标识符位难以实现信息截止期编码,以及各节点同时更新截止期需要严格的时间同步等问题,提
2010-10-11 16:33:2242 摘要 TTCAN通过独占窗口的方式解决消息传送的确定性问题,提高总线利用率,试图满足应用发展的要求。但是在恶劣环境的高误码率下,传送的可靠性下降,容错的措
2009-03-29 15:10:193163 CAN调度理论与实践分析
CAN总线中消息能否按时送达是事关系统安全等问题的重要指标,它要通过调度分析加以验证。本文介绍CAN
2009-03-29 15:11:55561 
DSP动态调度协议该协议动态地选择间隙传输请求或重传失败请求,这里提出2 个不同的间隙选择机制。(1)均衡间隙选择。实时数据和非实时
2009-03-30 10:27:41609 动态调度算法动态调度算法(DSA)包括2 个方面:动态调度协议(DSP)和利用非实时间隔重发控制数据。
2009-03-30 10:30:131534 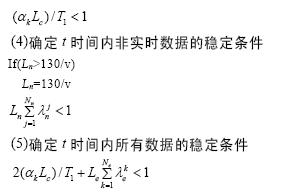
采用FTTCAN 协议作为 CAN总线 系统的传输协议, 针对LLF算法和HVDF算法的缺陷, 综合了松弛度和价值密度这两种调度考量指标来设计优先级分配策略, 提出了LVDF算法,实现了很好的调度性能
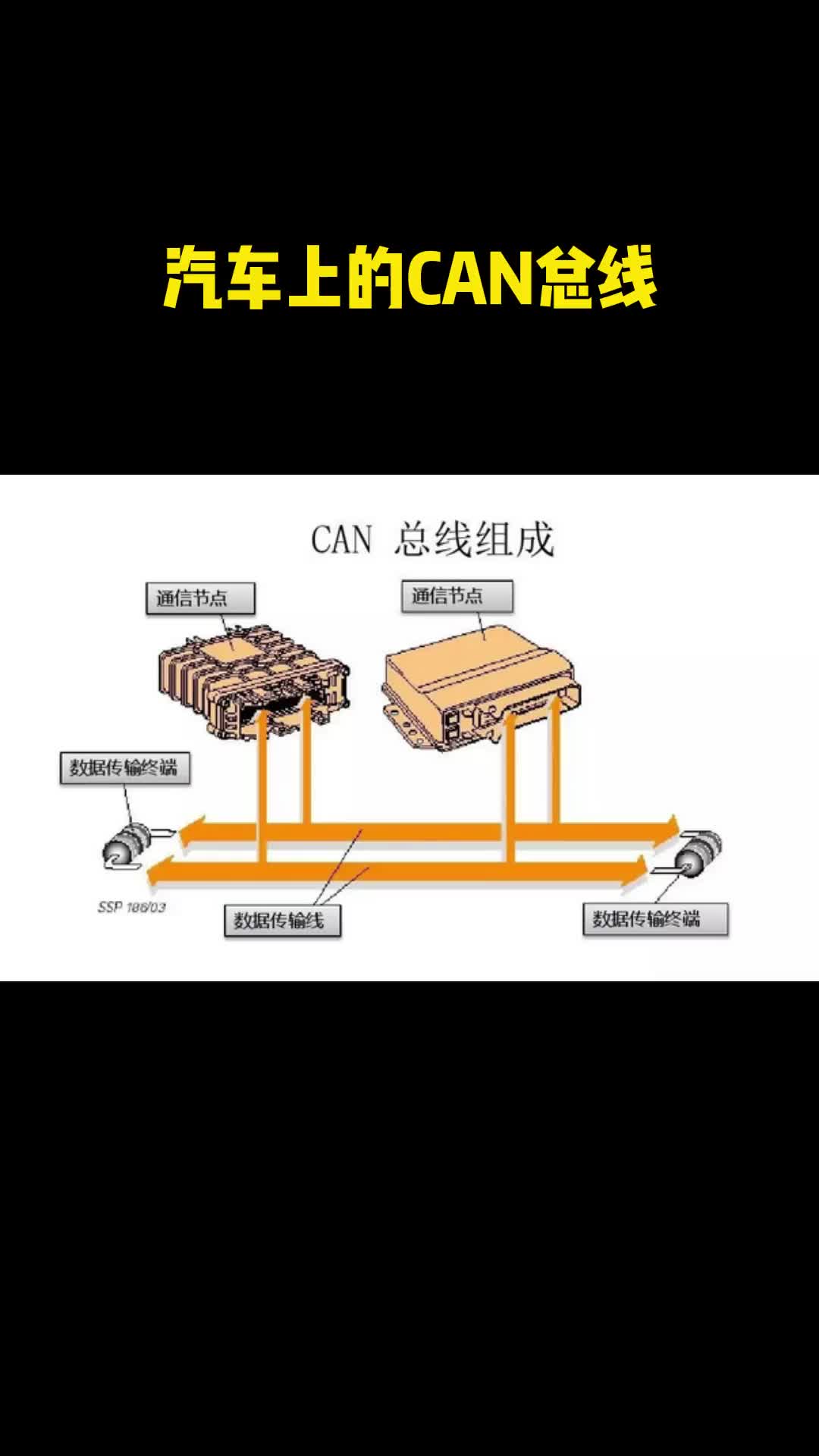
2011-07-15 10:52:1633 文中分析了CAN总线的发展和汽车CAN总线威廉希尔官方网站
的特征,对CAN总线在汽车领域的应用进行了深入的探讨。
2011-12-14 14:58:1084 基于CAN总线系统结构构成,通过工程实践的具体应用以及对CAN控制器及收发器硬件结构的深入理解,并从通信的角度出发着重深入分析了CAN总线通信的节点同步机制、总线地址机制、总
2012-05-08 15:23:04404 本书首先简要叙述了现场总线威廉希尔官方网站
的基础——计算机网络;其后的内容覆盖了CAN威廉希尔官方网站
的国际标准、几类有代表性的CAN器件、CAN智能节点的硬件和软件设计(包括在单片机和PC机上)、组网中的CAN网关和网桥
2016-04-05 13:43:280 本书首先简要叙述了现场总线威廉希尔官方网站
的基础——计算机网络;其后的内容覆盖了CAN威廉希尔官方网站
的国际标准、几类有代表性的CAN器件、CAN智能节点的硬件和软件设计(包括在单片机和PC机上)、组网中的CAN网关和网桥
2016-04-05 13:48:040 基于CAN总线伺服系统的多电机同步控制算法的研究,有兴趣的同学可以下载学习
2016-04-26 17:53:460 基于抢占阈值调度的动态电压分配算法_郝嘉磊
2017-01-07 18:39:170 云环境下基于动态蚁群遗传算法的调度方法研究_尚志会
2017-01-30 23:17:310 基于动态概率休眠调度机制的WSNs拓扑控制算法_韩瑞艳
2017-03-19 19:19:350 为了对生产车间调度过程中发生的动态事件进行快速、有效的处理,提出了一种将微粒群算法与遗传算法(CA)、模拟退火算法(SA)相结合的混合微粒群算法(CSPSO)。通过用标准车间调度问题对该算法的性能
2017-11-07 17:26:460 在云计算环境下,针对煤矿应急云的多用户和异构环境,为提高煤矿应急云平台中海量数据挖掘运算过程中作业的调度效率和系统负载平衡能力,提出一个基于排队论模型的煤矿应急云动态反馈作业调度算法,通过数据建模
2017-11-14 10:58:482 为了有效解决柔性作业车间调度问题(FJSP),提出了一种具有较强进化机制的动态双种群果蝇优化算法( DDFOA),该算法采用自适应移动步长,并动态地将种群划分为先进子种群和后进子种群,其中先进子种群
2017-11-25 11:15:170 Agent构成。首先提出一种针对混合流水车间环境的插值排序( HIS)算法并集成于策略Agent中,该算法适用于静态调度和多种动态事件下的动态调度。然后,设计了各类Agent间的协调机制,在生产过程中所有Agent根据各自的行为逻辑独立工作并互相协调。在发生动态事件时,策
2017-11-27 11:01:090 基于K-means聚类和遗传算法的云计算环境下任务调度的新算法。该算法借鉴K-means聚类方法的思想在任务调度前对任务进行聚类预处理,然后根据遗传算法的机制进行任务调度,并提出了时间一负载均衡约束的适应度函数,优化了变异算子。仿真
2017-12-07 15:16:100 成为工业数据通信领域的主流威廉希尔官方网站
、基础威廉希尔官方网站
,目前比较流行的TTCan,DeviceNet,CANo-pen,SAE J1939等规范均是以CAN为基础的,因此对CAN总线的深入研究是十分必要的。
2017-12-12 13:29:158953 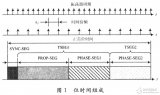
基于保证CAN总线网络传输数据时可靠性的目的,采用了从包内数据的可靠性、数据包的可靠性传输两方面进行验证的方法,通过多次对比使用文章设计的算法、不使用文章设计的算法时CAN总线网络传输数据的准确率
2017-12-21 16:19:060 任务调度响应实时性方面表现优异,但却不适用于异构多核处理器环境。为此,提出一种高实时性任务调度算法HRSA。在Min-Min调度算法的基础上融合LSF,EDF,HVF算法的调度策略,将任务能耗、任务完成价值和任务响应比相结合,在实现异构多核处理器任务动态
2018-02-07 11:07:431 一定研究价值。为此,对考虑大用户直购电的动态环境经济调度问题进行建模,并采用内点法多约束处理策略改进多目标细菌群体趋药性( MOBCC)优化算法进行求解,旨在从系统发电成本的角度研究大用户直购电对经济调度的影响。最
2018-03-22 13:48:180 CAN总线是一种基于优先级的串行通信网络,采用载波监听多路转换冲突避免协议,CAN总线中传输的数据帧的起始部分为数据的标识符,标识符可以区分消息又可以表示消息的优先级(0 的优先级最高)。
2018-04-24 17:48:1619008 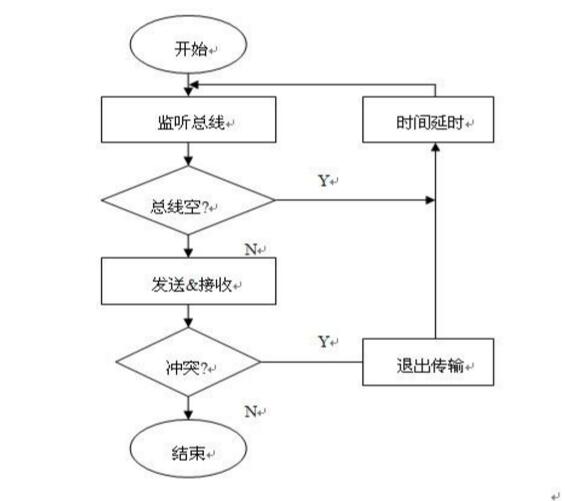
CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。CAN 总线的数据通信具有突出的可靠性、实时性和灵活性。由于其良好的性能及独特的设计,CAN总线越来越受到人们的重视,它在汽车领域上的应用是最广泛的。接下来及跟随小编一起来了解一下CAN总线的工作原理、特点及优缺点、应用领域及应用案例吧。
2018-05-07 10:36:3933700 
本文说的CAN即是一种总线,也是一种协议。因此,我们常听见CAN总线,也常听见CAN协议。CAN协议和CANOpen协议是两套不同的协议。从软硬件层次来划分,CAN协议属于硬件协议,而CANOpen
2018-10-03 19:53:0073332 
控制器局域网CAN (Controller Area Network)是目前被批准为国际标准的少数现场总线之一。它是一种有效支持分布式实时控制的串行通信网络。具有实时性强,可靠性高,连接方便,性价比
2018-11-22 16:35:037 本文档的主要内容详细介绍的是CAN总线基础的详细资料概述包括了:概述,汽车总线与CAN标准,CAN的通信机制,数据帧,错误检测与错误帧,CAN的帧格式,位定时与同步
2019-11-29 15:31:20105 利用TrueTime工具箱,构建由一台计算机通过CAN总线控制四台直流电动机的多处理器网络控制仿真系统,分析调度算法对控制性能的影响,仿真原理图如图1所示。
2020-03-14 10:33:11731 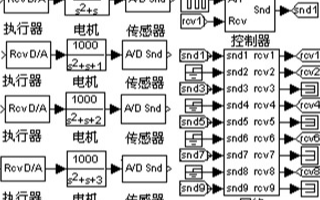
1. 简介 CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。另外不同于传统的网络(比如USB或者以太网),CAN节点
2020-12-22 16:36:282179 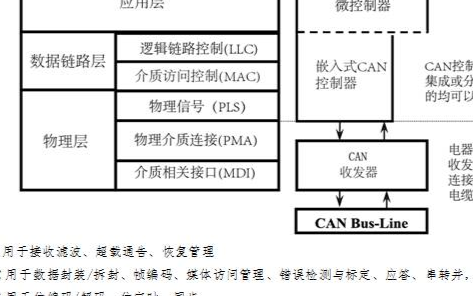
CAN(ControllerAreaNetwork)总线,即控制器局域网总线,在工业控制、医疗电子、家用电器及传感器领域都得到了广泛的应用。
2020-12-24 10:45:566819 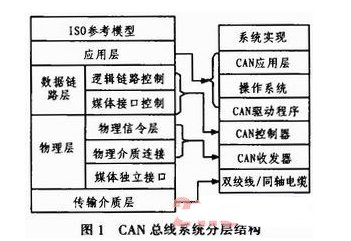
CAN总线一直以来以稳定、容错性高而著称。要想达到这样的效果,其独特的同步机制是非常重要的一点,本文将为大家讲解一下CAN总线的同步机制以及SJW的作用所在。
2020-12-26 02:52:08957 1. 简介 CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。另外不同于传统的网络(比如USB或者以太网),CAN节点
2021-01-26 14:42:471918 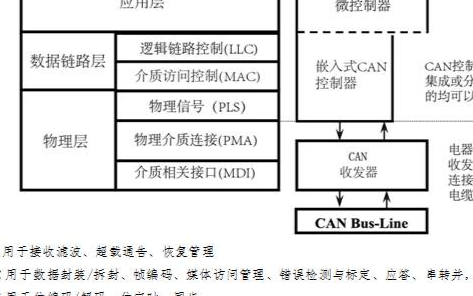
以MSCAN08和MSCAN12为示例,讲述CAN现场总线,初步掌握CAN总线威廉希尔官方网站
的应用。
2021-04-20 16:12:35287 调度是拟态构造Web服务器的重要机制,现有的调度算法多数缺乏对拟态构造Web服务器异构性和Web服务质量的考虑,不能解决调度机制带来的安全性和Web服务质量不稳定的问题。为此,提出基于最大
2021-06-09 14:23:0811 以延迟容忍剩余时长为度量依据,提出一种对业务进行动态分组的上行优先级调度算法。采用资源块(RB大小可变的分配方式满足RB的邻接约束,引入混合自动轮询机制解决算法对低优先级业务调度不公平的问题。仿真
2021-06-11 11:17:5414 动态学习机制的双种群蚁群算法综述
2021-06-11 16:27:3610 很多的司机朋友以及工控圈的朋友都有听到过“CAN总线”一词,今天我们就来一起看一下CAN总线为什么这么火? CAN总线,也叫做控制器局域网总线(Controller Area Network
2022-01-15 17:04:485782 CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。
2022-05-14 14:29:053671 高速CAN总线上为显性电平(逻辑0)时,CAN_H为3.5V、CAN_L为1.5V,此时电压差是2V,显性状态的CAN总线电压范围。
高速CAN总线上为隐性电平(逻辑1)时,CAN_H和CAN_L都为2.5V,此时电压差就是0V,隐性状态的CAN总线电压范围。
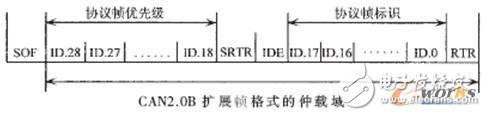
2022-09-13 16:57:223631 在详解CAN总线:CAN总线报文格式—数据帧文章中,讲解到仲裁段。仲裁段用于写明需要发送到目的CAN节点的地址、确定发送的帧类型(当前发送的是数据帧还是遥控帧),并确定发送的帧格式是标准帧还是扩展帧。
2022-10-25 14:00:181632 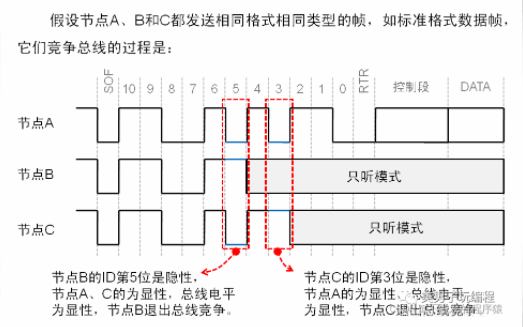
CAN总线由德国BOSCH公司开发,最高速率可达到1Mbps。CAN的容错能力特别强,CAN控制器内建了强大的检错和处理机制。
2022-11-03 10:45:581733 在本文中将继续为大家深入讲解CAN总线的位填充机制、错误检测和故障界定、网络拓扑、终端匹配、电缆与接线、差分信号电压幅值。
2023-02-09 11:05:201039 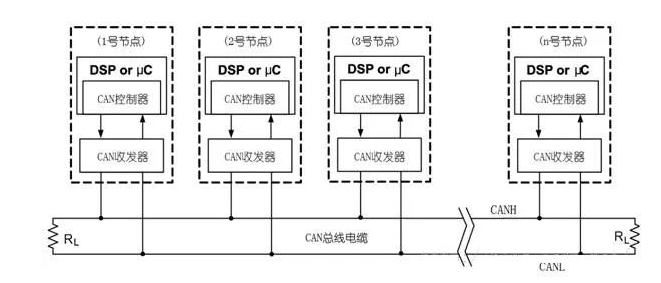
、高速性和优秀的网络管理能力。 在CAN总线中,数据通过两根线进行传输,即CAN-H线和CAN-L线。CAN-H线为高电平,CAN-L线为低电平。这两根线同时传输数据,其中高优先级的消息可以覆盖低优先级的消息。这种双线传输的机制使得CAN总线能够同时传输多个
2023-12-07 18:09:401216 CAN总线采取多种威廉希尔官方网站
措施来消除外界干扰,确保可靠通信。
2024-01-30 09:50:44249 高速CAN总线和低速CAN总线的特性 高速CAN总线和低速CAN总线是两种常见的CAN总线类型。它们在数据传输速率、最大电缆长度、适用场景等方面存在一些差异。下面将详尽、详实、细致地介绍这两种CAN
2024-01-31 14:09:01497
 电子发烧友App
电子发烧友App














 工商网监
工商网监
评论