 电子发烧友App
电子发烧友App


摘要:CYGNAL生产的单片机C8051F040是代表8位单片机发展方向的高速(25M)混合信号系统级芯片(SOC)它不仅集成了一般测控系统需要的外设,而且集成了很有发展前景的现场总线—CAN总线控制器,文中对该芯片中的CAN控制器结构作了分析,并给出了在分布式测控系统中使用该芯片的智能节点的硬件、软件设计方案。
1 概述
分布式在线测控系统是由多个面向设备的、以MCU为核心的智能处理单元和多个并行运行且具有不同监测和故障诊断功能的微机构成的。该系统采取“分治”的设计思想?它将数据采集以及部分数据处理任务交给设备层的智能处理单元去完成?而监测诊断层主要负鸺嗍雍凸收险锒稀7植际讲饪叵低成杓凭??悸歉鞲鼋诘阒?涞耐ㄐ盼侍猗熞蛭?ㄐ磐?绲难∪《韵低承阅苡泻艽笥跋臁?国内已开展了基于现场总线的在线测控系统的研究?并利用CAN总线实现设备层的检测处理、单元间的通信以及与上层监测主机的通信。CAN总线就是一种支持分布式实时控制系统的串行通信局域网络总线。它的主要特点如下:
●任一个节点均可在任一时刻主动向网络上的其它节点发送数据,而从不分主从,因此,通信比较灵活;
●节点可分为不同的优先级,可以满足不同的实时要求;
●采用非破坏性总线仲裁,当两节点同时向总线发送信息时,优先级低的节点主动停止数据发送?而优先级高的节点可不受影响地继续发送数据;
●通信距离最远可达10km,通信最高速率可达1Mbps?
●每帧数据的有效字节数为8,因此,可保证很短的传输时间,而且实时性强,受干扰的概率低;
●每帧数据都含有CRC(循环冗余)校验及其它校验措施,因而数据出错率很低;
●CAN总线节点在严重错误的情况下,可自动切断与总线的联系,以使总线上的其它操作不受影响。
目前,CAN总线协议以其可靠性高、实时性好以及独特的设计已经成为总线通信网络的首选?国内目前使用较广的是PHILIPS 生产的SJA1000 、82C200等独立的CAN控制器,由于这种独立的控制器限制了测控节点的集成度,因此,很多微处理器生产厂家已经开始生产内部集成有CAN控制器的MCU。美国CYGNAL公司生产C8051F040就是内部集成有BOSCH CAN控制器的混合信号系统级芯片(SOC)。本文将分析C8051F040 的CAN总线结构、与CPU 的接口及初始化配置,同时将给出基于C8051F040的分布式测控节点的设计及系统的实现框架。
2 C8051F040及其内部BOTSH CAN
Cygnal公司的单片机C8051F040具有与8051指令集完全兼容的CIP-51内核。它的最高频率可达25MHz?内置64kB FLASH RAM和4kB的数据存储器。C8051F040在一个芯片内集成了构成单片机数据采集或控制系统所需要的几乎所有interwetten与威廉的赔率体系 和数字外设及其它功能部件,包括ADC、可编程增益放大器、DAC、电压比较器、温度传感器、SMBus/I2C、UART、SPI、定时器、内部振荡器、看门狗电路以及CAN 控制器等,这种高度集成为设计小体积、低功耗、高可靠和高性能的测控系统提供了方便,同时也使测控设备整体成本能够降低。
C8051F040内部集成有BOTSH CAN,它兼容CAN威廉希尔官方网站
规范2.0A和2.0B,主要由CAN内核、消息RAM(独立于CIP-51的RAM)、消息处理单元和控制寄存器组成,图1所示是C8051F040内部的CAN总线结构图。
图1中,CAN内核由CAN协议控制器和负责消息收发的串行/并行转换RX/TX移位寄存器组成。消息RAM用于存储消息目标和每个目标的仲裁掩码。这种CAN处理器有32个随意配置为发送和接受的消息目标?并且每一个消息目标都有它自己的识别掩码,所有的数据传输和接收滤波都是由CAN控制器完成的,而不是由CIP-51来完成。
CAN内部寄存器中存储了所有CAN的控制和配置信息,其中包括控制寄存器、状态寄存器、设置波特率的位定时寄存器 、测试寄存器、错误计数器和消息接口寄存器。通常CAN内核不能直接访问消息RAM,而必须通过接口寄存器IF1或IF2来访问。另外,CIP-51的SFR并不能直接访问CAN内部寄存器的所有单元,其配置CAN、消息目标、读取CAN状态以及获取接收数据、传递发送数据都由SFR中的6个特殊寄存器来完成,其中CAN0CN、CAN0TST和CAN0STA 3个寄存器可直接获取或修改CAN 控制器中对应的寄存器,而CAN0DATH、CAN0DATL、CAN0ADR 3个寄存器主要用来访问修改其它不能直接访问的CAN 内部寄存器,其中CAN0ADR用来指出要访问寄存器的地址,CAN0DATH、CAN0DATL这时就相当于要访问的16位寄存器的高、低字节的映射寄存器,而对它们的读写则相当于对所指向寄存器的读写。图2给出了CIP-51如何访问CAN中控制寄存器和每个消息的路径图。
消息处理单元用于根据寄存器中的信息来控制CAN内核中移位寄存器和消息RAM 之间的数据传递,同时,它还可用来管理中断的产生。
3 基于C8051F040的智能系统设计
3.1 硬件设计
工业测控现场通常存在着大量的传感器、执行机构和电子控制单元,它们一般分布较广,而且对实时性要求也很高,图3是基于CAN总线的分布式测控系统框图。该系统采用现场总线式集散系统FDCS?Field Distributed Control System?结构,它由主控站(注:CAN总线各节点并不分主从 ?这里是针对特定的系统而言)、C8051F040为MCU的智能节点并配以CAN现场总线控制网络构成。主控站主要完成对各节点的在线监控以及对各节点返回信息的分析处理,并对节点发出控制命令以控制节点工作模式。智能节点则根据主控站命令来完成数据采集、运行显示以及对执行部件的控制,以及各节点与主站、节点与节点之间的实时数据交换和信息控制。
图4是一个以C8051F040为核心的智能节点设计原理图。
图中,C8051F040的6、7脚分别为CANRX和CANTX引脚,CAN的输出输入必须加总线收发器才能与CAN物理总线相连。本系统采用了TJA1050高速CAN收发器来替代传统的PCA82C250收发器,TJA1050芯片具有电磁辐射低、防短路、不上电时对总线无影响等特点,它的8脚S可以选择高速或静音两种模式,并可由C8051F040的P4.0控制。为了增加CAN 节点的抗干扰能力,将CAN引脚通过高速光耦6N137与总线收发器相连,可实现各节点之间的电气隔离。电源的隔离可以采用小功率电源隔离模块,也可以用带多个5V隔离输出的开关电源模块。这样能大大提高节点的稳定性和可靠性,但可能会增加节点的硬件复杂性。
3.2 节点软件设计
对于一个实际的测控系统,其节点软件是比较复杂的,但由于C8051F040具有与8051指令完全兼容的CIP-51内核,所以,对于有使用51系列单片机经验的人来说,这并没有太大的难度,下面主要介绍C8051F040内置CAN的软件设计。
如果需要某一节点将A/D采样值通过CAN总线送到主控站(地址01H),且配置系统时设定的工作频率为25MHz?CANTX引脚设为推挽方式,那么在初始化过程中,波特率应配置为160kbps,消息目标禁止不用,配置消息目标2为接收时的程序代码如下:
CAN_INIT:
MOV SFRPAGE,#01H
ORL CAN0CN,#41H ;设INIT位为1, CCE为1
; 配置波特率
MOV CAN0ADR,#03H
MOV CAN0DATH,#7FH
MOV CAN0DATL,#05H
;禁止不用的消息目标(3-32)
MOV CAN0ADR, #0DH ; 指向IF1的仲裁控制寄存器2
MOV CAN0DATH,#00H ; MAGVAL=0;
MOV CAN0ADR,#09H ; 指向IF1的命令掩码寄存器
MOV CAN0DATL,#0A0H ?; 方向为写,改变仲裁位
MOV R1,#20H
MOV CAN0ADR, #08H ;指向IF1的命令寄存器
ENABLE_MESSAGE_OBJECTS:
MOV CAN0DATL,R1 ;写R1指向的消息目标
MOV CAN0ADR, #08H ;指向IF1的命令寄存器
WAIT_TRANSFER_OVER?
MOV A,CAN0DATH ?;读命令寄存器
JB ACC.7,WAIT_TRANSFER_OVER
DEC R1
CJNE R1,#02H,ENABLE_MESSAGE_BJECTS
;配置消息目标2为接收
MOV CAN0ADR,#21H
MOV CAN0DATL,#11111000B?; 写IF2命令掩码
MOV CAN0DATH,#00H
MOV CAN0DATL,#00H ?;写IF2掩码1
MOV CAN0DATH,#00H
MOV CAN0DATL,#00H ?; 写IF2掩码2
MOV CAN0DATL,#00H ?; 写IF2仲裁寄存器1
MOV CAN0DATH,#80H ?; 写IF2仲裁寄存器2高8位
消息目标有效,标准仲裁帧,方向为接收
MOV CAN0DATL,#00H ?; 写IF2仲裁寄存器2低8位
MOV CAN0DATH,#00010100B?; 写IF2控制寄存器高位
MOV CAN0DATL,#80H ?; 写IF2控制寄存器低位
MOV CAN0ADR, #20H
MOV CAN0DATL, #02H ?; 通过IF2写2号消息目标
WAIT_TRANSFER_OVER1;
MOV A,CAN0DATH ; 读命令寄存器
JB ACC.7,WAIT_TRANSFER_OVER1
; 等待写结束
;CAN进入操作模式
MOV CAN0CN,#00000010B ; CAN进入正常操作模式状态中断使能,
RET
发送过程是将存储在从BUF0起始地址中的2个字节的A/D采样数据,通过IF1传送到消息目标1的过程。其启动发送程序代码如下:
SEND_AD_DATA:
MOV SFRPAGE, #01H
MOV CAN0ADR, #09H
MOV CAN0DATL,#10110111B
; 写IF1命令掩码寄存器
MOV CAN0ADR, #0DH
MOV CAN0DATH,#10100000B ;使用11位标准仲帧
MOV CAN0DATL,#04H ;写IF1仲裁寄存器2,发送对象的地址01因标准帧使用高11位,所以地址要左移2位指向控制寄存器
MOV CAN0DATH,#00001001B ; 写IF1控制寄存器高8位,传输中断使能,置传输请求位
MOV CAN0DATL,#0BH ?; 写IF1控制寄存器低8 位,EOB=1 DLC=0指向BUF0
MOV DPTR,BUF0
MOVX A,@DPTR
MOV CAN0DATL,A ?; 写IF1数据0
INC DPTR
MOVX A,@DPTR
MOV CAN0ADR,#0FH
MOV CAN0DATH,A ?; 写IF1数据1
MOV CAN0ADR, #08H
MOV CAN0DATL,#01H ?;传递到目标1及启动发送
RET
4 结束语
Cygnal公司的单片机C8051F040是一种完全集成的混合信号系统级芯片(SOC),它具有与8051指令集完全兼容的CIP-51内核?代表了8位单片机的发展方向。它不仅集成有构成监控系统常用的外设,而且集成了逐渐成为控制领域首选的高可靠性、高性能C8051F040 CAN总线;本文使用该芯片设计的测控系统智能节点具有集成度高、性能稳定等特点。由于C8051F040可达到25MHz工作频率,因而可提高系统实时性。此外,由于BOTSCH CAN内有32个自带掩码消息目标的特殊设计,因此,用其进行分布式在线测控系统节点之间的相互数据传递设计将更为简单。
- c805(9848)


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
相关推荐
基于C8051F040单片机的温度测控系统
 2403
2403
基于C8051F040多路浸水时刻记录电路模块化设计
1856
C8051F040单片机在CAN通信网络中的应用
c8051f040产生8位PWM方波
c8051f的板子
c8051f系列单片机的相关问题
分布式系统的优势是什么?
分布式系统的组合相位噪声性能怎么评估?
分布式软总线子系统
分布式软总线实现近场设备间统一的分布式通信管理能力如何?
分布式软件系统
分布式控制系统
在分布式嵌入式系统的过程中利用Jini威廉希尔官方网站 有什么优势?
Embedded SIG | 分布式软总线
JTAG往c8051f040下程序失败
【学习打卡】OpenHarmony的分布式任务调度
一文带你看懂分布式软总线在家庭场景的应用
什么是CAN总线 CAN总线有什么作用
基于CAN总线的温度测控系统介绍
基于虚拟仪器的城市景观照明分布式控制系统设计与实现
如何为C8051F040多路浸水时刻记录电路设计方案?
如何利用FPGA设计无线分布式采集系统?
如何基于分布式软总线进行“三步走”极简开发
如何将C8051F040单片机扩展出第三对串口(TX RX)?
如何设计分布式干扰系统?
微处理器C8051F040相关资料下载
怎么实现基于RS-485总线的远程测控系统的设计?
数据采集卡/分布式采集模块/无线通讯采集模块/嵌入式系统
有偿单片机编程求助
求一种基于CAN总线、GPIB总线和以太网的分布式电机驱动测试系统
汽车电子与CAN总线-汽车车身网络系统
C8051F040/C8051F041/C8051F042中
 263
263c8051f040/c8051f041/c8051f042/
151基于CAN 总线的分布式潜水电机监控系统
19基于多Agent 威廉希尔官方网站 的分布式测控系统研究
18基于 CAN总线的分布式三维步进电机控制系统
23分布式测控系统框架模型研究
13基于C8051f040的CAN总线智能节点设计
23CANOpen总线与软PLC在MPS中的应用
50基于CAN总线网络的分布式检测系统研究
18对C8051F040的CAN控制器的分析及应用
26CAN总线在车辆分布式控制系统中的应用
30C8051F040单片机在CAN通信网络中的应用
41C8051F040在曳引及制动性能检测系统中的应用
15基于虚拟仪器的城市景观照明分布式控制系统设计与实现
24基于C8051F040的方位角测试系统
34基于CAN总线的分布式电池管理系统
1014
基于C8051F040的特种车辆电源监控系统设计
795基于C8051F040的炮塔方位角测试系统设计
786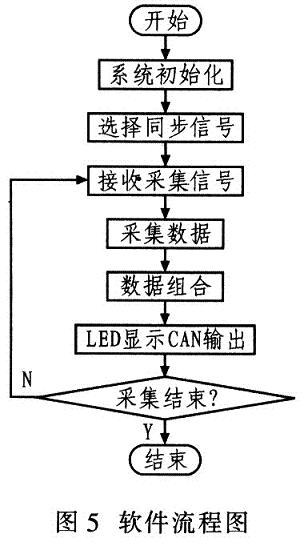
基于C8051F040的模型车无线控制系统的设计
964
基于声纳传感器和C8051F040的测距系统设计
1817
基于C8051F040的以太网-CAN转换电路设计
67CAN总线实现工业网络分布式测控系统
1813CAN总线的分布式控制系统中组态软件的应用
27基于CAN总线的远程数据分布式测控系统设计
52基于C8051F040单片机的CAN总线测试模式研究
71基于C8051F040的CAN总线温湿度数据采集系统设计
15基于C8051F040单片机的CAN总线通信
1056C8051F040单片机智能节点通信设计
2134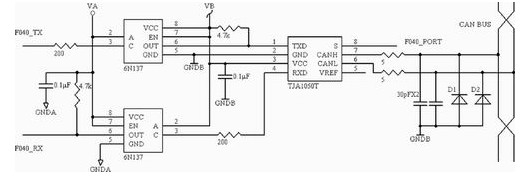
CP2102与C8051F040的USB-CAN转换器设计资料下载
4基于CAN总线的温度测控系统
22基于UC3875和C8051F040单片机设计开发的智能充电器
4- 英国威廉希尔公司网站
- william hill 中国
- 电源/新能源
- MEMS/传感威廉希尔官方网站
- 2018威廉希尔决赛赔率
- 嵌入式威廉希尔官方网站
- 制造/封装
- interwetten与威廉的赔率体系
- RF/无线
- 接口/总线/驱动
- william hill
- EDA/IC设计
- 存储威廉希尔官方网站
- wh867
- EMC/EMI设计
- 连接器
- william hill官网
- LEDs
- 汽车电子
- 音视频及家电
- 通信网络
- 医疗电子
- 人工智能
- 虚拟现实
- 可穿戴设备
- 机器人
- 安全设备/系统
- 军用/航空电子
- 移动通信
- 工业控制
- 便携设备
- 触控感测
- 物联网
- 智能电网
- 区块链
- 新科技
- 特色内容
- 专栏推荐
- 学院
- 设计资源
- 英国威廉希尔公司网站
- 电子百科
- 电子视频
- 元器件知识
- 工具箱
- VIP会员
- 最新威廉希尔官方网站 文章
- 联系我们
- 广告合作
- 王婉珠:wangwanzhu@elecfans.com
- 内容合作
- 黄晶晶:huangjingjing@elecfans.com
- 内容合作(海外)
- 张迎辉:mikezhang@elecfans.com
- 供应链服务 PCB/IC/PCBA
- 江良华:lanhu@huaqiu.com
- 投资合作
- 曾海银:zenghaiyin@huaqiu.com
- 社区合作
- 刘勇:liuyong@huaqiu.com
-
关注我们的微信

-
下载发烧友APP

-
电子发烧友观察



版权所有 © 深圳华秋电子有限公司
电子发烧友 (电路图) 粤公网安备 44030402000349 号 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号
评论