 电子发烧友App
电子发烧友App


一、U-BOOT的目录结构 u-boot目录下有18个子目录,分别存放管理不通的源程序。
这些目录中所要存放的文件有其规则,可以分成三类。
■第一类目录与处理器体系结构或者开发板硬件直接相关;
■第二类目录是一些通用的函数或者驱动程序;
■第三类目录是u-boot的应用程序、工具或者文档。
Board:和一些已有开发板相关的文件,比如Makefile和u-boot.lds等都和具体开发板的硬件和地址分配有关。
Common:与体系结构无关的文件,实现各种命令的C文件。
CPU:CPU相关文件,其中的子目录都是以u-boot所支持的CPU为名,比如有子目录arm926ejs、mips、mpc8260和nios等,每个特定的子目录中都包括cpu.c和interrupt.c和start.S。其中cpu.c初始化cpu、设置指令cache和数据cache等;interrupt.c设置系统的各种终端和异常,比如快速中断,开关中断、时钟中断、软件中断、预取中止和未定义指令等;start.S是u-boot启动时执行的第一个文件,他主要是设置系统堆栈和工作发式,为进入C程序奠定基础。
Disk:disk驱动的分区处理代码、
Doc:文档。
Drivers:通用设备驱动程序,比如各种网卡、支持CFI的flash、串口和USB总线等。
Dtt:数字温度测量器或者传感器的驱动
Examples:一些独立运行的应用程序的例子。
Fs:支持文件系统的文件,u-boot现在支持cramfs、fat、fdos、jffs2、yaffs和registerfs。
Include:头文件,还有对各种硬件平台支持的会变文件,系统的配置文件和对文件系统支持的文件。
Net:与网络有关的代码,BOOTP协议、TFTP协议RARP协议和NFS文件系统的实现。
Lib_ppc:存放对PowerPC体系结构通用的文件,主要用于实现PowerPC平台通用的函数,与PowerPC体系结构相关的代码。
Lib_i386:存放对X86体系结构通用的文件,主要用于实现X86平台通用的函数,与PowerPc体系结构相关的代码。
Lib_arm:存放对ARM体系结构通用的文件,主要用于实现ARM平台通用的函数,与ARM体系结构相关的代码。
Lib_generic:通用的多功能函数实现。
Post:上电自检。
Rtc: 实时时钟驱动。
Tools:创建S-Record格式文件和U-BOOT images的工具。
二、u-boot的编译 u-boot的源码是通过GCC和Makefile组织编译的,顶层目录下的Makefile首先可以设置板子的定义,然后递归地调用各级目录下的Makefile,最后把编译过的程序链接成u-boot的映像。 顶层目录下的Makefile,它是负责U-Boot整体配置编译。每一种开发板在Makefile都需要有板子配置的定义,如smdk2442定义如下: smdk2442_config: unconfig @./mkconfig $(@:_config=) arm arm920t smdk2442 执行配置U-Boot的命令make smdk2442_config,通过./mkconfig脚本生成include/config.mk的配置文件。文件内容是根据Makefile对板子的配置生成的。
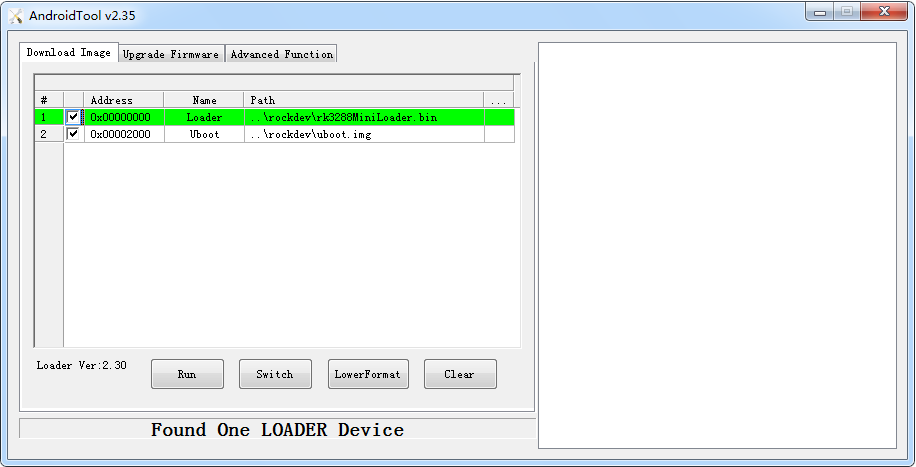
配置环境和编译过程如下所述,U-boot的编译环境配置需要:cross-2.95.3.tar.bz2和s3c24x0_uboot_rel_0_0_1_061002.tar.bz2,将文件拷贝到/home/amoi/working/下,(chenpx@chenpx:/mnt/hgfs/share$ cp cross-2.95.3.tar.bz2 /home/amoi/working 和chenpx@chenpx:/mnt/hgfs/share$ cp s3c-u-boot-1.1.6.tar.bz2 /home/amoi/working), 然后对对文件进行解压(chenpx@chenpx:/home/chenpx/working$ tar jxvf cross-2.95.3.tar.bz2和chenpx@chenpx:/home/chenpx/working$ tar jxvf s3c24x0_uboot_rel_0_0_1_061002.tar.bz2),在/usr/local/目录下建立一个arm文件夹(mkdir –p /usr/local/arm (-p 是需要时创建上层目录,如目录早已存在则不当作错误))
将cross-2.95.3.tar.bz2解压出来的移动到/usr/local/arm/下(mv 2.95.3 /usr/local/arm/) 移动后添加环境变量export PATH=$PATH:/usr/local/2.95.3/bin/ 修改s3c24x0_uboot_dev中的makefile,修改CROSS_COMPILE = /usr/local/arm/2.95.3/bin/arm-linux-其他的用#注释掉。 接下来就是加载配置: 最后进行编译:make,最终在s3c24x0_uboot-dev目录下生成u-boot、u-boot.bin、u-boot.map、2 u-boot.srec四个文件。
三、u-boot系统启动流程 大多数bootloader都分为stage1和stage2两部分,u-boot也不例外。依赖于CPU体系结构的代码(如设备初始化代码等)通常都放在stage1且可以用汇编语言来实现,而stage2则通常用C语言来实现,这样可以实现复杂的功能,而且有更好的可读性和移植性。 1、Stage1 start.S代码结构 u-boot的stage1代码通常放在start.S文件中,他用汇编语言写成,其主要代码部分如下:
(1)定义入口。由于一个可执行的Image必须有一个入口点,并且只能有一个全局入口,通常这个入口放在ROM(Flash)的0x0地址,因此,必须通知编译器以使其知道这个入口,该工作可通过修改连接器脚本来完成。
(2)设置异常向量(Exception Vector)。
(3)设置CPU的速度、时钟频率及终端控制寄存器。
(4)初始化内存控制器。
(5)将ROM中的程序复制到RAM中。
(6)初始化堆栈。
(7)转到RAM中执行,该工作可使用指令ldr pc来完成。
2、Stage2 C语言代码部分 lib_arm/board.c中的start arm boot是C语言开始的函数也是整个启动代码中C语言的主函数,同时还是整个u-boot(armboot)的主函数,该函数只要完成如下操作:
(1)调用一系列的初始化函数。
(2)初始化Flash设备。
(3)初始化系统内存分配函数。
(4)如果目标系统拥有NAND设备,则初始化NAND设备。
(5)如果目标系统有显示设备,则初始化该类设备。
(6)初始化相关网络设备,填写IP、MAC地址等。
(7)进去命令循环(即整个boot的工作循环),接受用户从串口输入的命令,然后进行相应的工作。
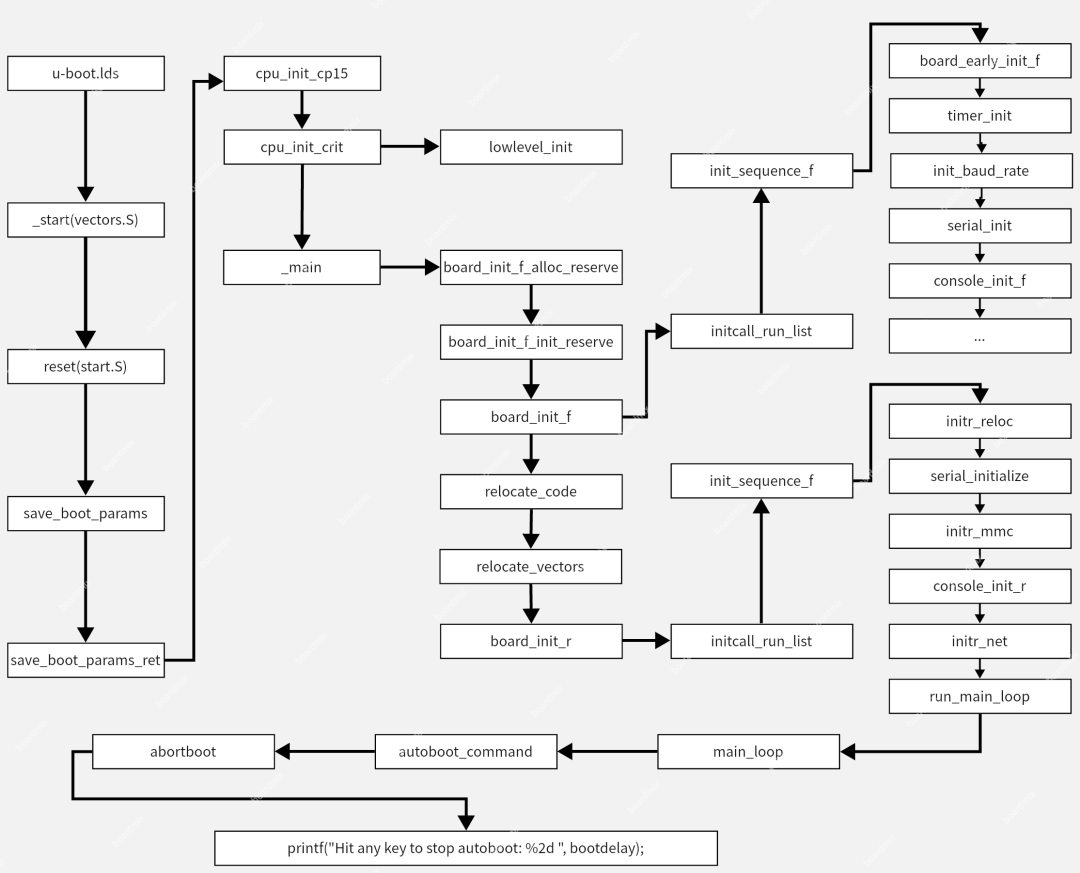
3、U-Boot的启动顺序
主要顺序如下图所示
函数顺序 初始化顺序
图为 U-Boot顺序
下面就根据代码进行解释:
/*********************** 中断向量 ***********************/
.globl _start //u-boot启动入口
_start: b reset //复位向量并且跳转到reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq //中断向量
ldr pc, _fiq //中断向量
b sleep_setting //跳转到sleep_setting
并通过下段代码拷贝到内存里
relocate: //把uboot重新定位到RAM
adr r0, _start // r0 是代码的当前位置
ldr r2, _armboot_start //r2 是armboot的开始地址
ldr r3, _armboot_end //r3 是armboot的结束地址
sub r2, r3, r2 // r2得到armboot的大小
ldr r1, _TEXT_BASE // r1 得到目标地址
add r2, r0, r2 // r2 得到源结束地址
copy_loop: //重新定位代码
ldmia r0!, {r3-r10} //从源地址[r0]中复制
stmia r1!, {r3-r10} //复制到目标地址[r1]
cmp r0, r2 //复制数据块直到源数据末尾地址[r2]
ble copy_loop
系统上电或reset后,cpu的PC一般都指向0x0地址,在0x0地址上的指令是
reset: //复位启动子程序
/******** 设置CPU为SVC32模式***********/
mrs r0,cpsr //将CPSR状态寄存器读取,保存到R0中
bic r0,r0,#0x1f
orr r0,r0,#0xd3
msr cpsr,r0
//将R0写入状态寄存器中
/************** 关闭看门狗 ******************/
ldr r0, =pWTCON
mov r1, #0x0
str r1, [r0]
/************** 关闭所有中断 *****************/
mov r1, #0xffffffff
ldr r0, =INTMSK
str r1, [r0]
ldr r2, =0x7ff
ldr r0, =INTSUBMSK
str r2, [r0]
/************** 初始化系统时钟 *****************/
ldr r0, =LOCKTIME
ldr r1, =0xffffff
str r1, [r0]
clear_bss:
ldr r0, _bss_start //找到bss的起始地址
add r0, r0, #4 //从bss的第一个字开始
ldr r1, _bss_end // bss末尾地址
mov r2, #0x00000000 //清零
clbss_l:str r2, [r0] // bss段空间地址清零循环
add r0, r0, #4
cmp r0, r1
bne clbss_l
/***************** 关键的初始化子程序 ************************/
/ * cpu初始化关键寄存器
* 设置重要寄存器
* 设置内存时钟
* /
cpu_init_crit:
/** flush v4 I/D caches*/
mov r0, #0
mcr p15, 0, r0, c7, c7, 0 /* flush v3/v4 cache */
mcr p15, 0, r0, c8, c7, 0 /* flush v4 TLB */
/************* disable MMU stuff and caches ****************/
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002300 @ clear bits 13, 9:8 (--V- --RS)
bic r0, r0, #0x00000087 @ clear bits 7, 2:0 (B--- -CAM)
orr r0, r0, #0x00000002 @ set bit 2 (A) Align
orr r0, r0, #0x00001000 @ set bit 12 (I) I-Cache
mcr p15, 0, r0, c1, c0, 0
/******* 在重新定位前,我们要设置RAM的时间,因为内存时钟依赖开发板硬件的,你将会找到board目录底下的memsetup.S。**************/
mov ip, lr
#ifndef CONFIG_S3C2440A_JTAG_BOOT
bl memsetup //调用memsetup子程序(在board/smdk2442memsetup.S)
#endif
mov lr, ip
mov pc, lr //子程序返回
memsetup:
/**************** 初始化内存 **************/
mov r1, #MEM_CTL_BASE
adrl r2, mem_cfg_val
add r3, r1, #52
1: ldr r4, [r2], #4
str r4, [r1], #4
cmp r1, r3
bne 1b
/*********** 跳转到原来进来的下一个指令(start.S文件里) ***************/
mov pc, lr //子程序返回
/****************** 建立堆栈 *******************/
ldr r0, _armboot_end //armboot_end重定位
add r0, r0, #CONFIG_STACKSIZE //向下配置堆栈空间
sub sp, r0, #12 //为abort-stack预留个3字
/**************** 跳转到C代码去 **************/
ldr pc, _start_armboot //跳转到start_armboot函数入口,start_armboot
字保存函数入口指针
_start_armboot: .word start_armboot //start_armboot函数在lib_arm/board.c中实现
从此进入第二阶段C语言代码部分
/**************** 异常处理程序 *******************/
.align 5
undefined_instruction: //未定义指令
get_bad_stack
bad_save_user_regs
bl do_undefined_instruction
.align 5
software_interrupt: //软件中断
get_bad_stack
bad_save_user_regs
bl do_software_interrupt
.align 5
prefetch_abort: //预取异常中止
get_bad_stack
bad_save_user_regs
bl do_prefetch_abort
.align 5
data_abort: //数据异常中止
get_bad_stack
bad_save_user_regs
bl do_data_abort
.align 5
not_used: //未利用
get_bad_stack
bad_save_user_regs
bl do_not_used
.align 5
irq: //中断请求
get_irq_stack
irq_save_user_regs
bl do_irq
irq_restore_user_regs
.align 5
fiq: //快速中断请求
get_fiq_stack
/* someone ought to write a more effiction fiq_save_user_regs */
irq_save_user_regs
bl do_fiq
irq_restore_user_regs
sleep_setting: //休眠设置
@ prepare the SDRAM self-refresh mode
ldr r0, =0x48000024 @ REFRESH Register
ldr r1, [r0]
orr r1, r1,#(1bd = &bd_data;
memset (gd->bd, 0, sizeof (bd_t));
monitor_flash_len = _armboot_end_data - _armboot_start;
/*** 调用执行init_sequence数组按顺序执行初始化 ***/
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
#if 0
/**************** 配置可用的flash单元 *************/
size = flash_init (); //初始化flash
display_flash_config (size); //显示flash的大小
/******** _arm_boot在armboot.lds链接脚本中定义 ********/
#endif
#ifdef CONFIG_VFD
# ifndef PAGE_SIZE
# define PAGE_SIZE 4096
# endif
/*********** 为VFD显示预留内存(整个页面) **********/
/******** armboot_real_end在board-specific链接脚本中定义********/
addr = (_armboot_real_end + (PAGE_SIZE - 1)) & ~(PAGE_SIZE - 1);
size = vfd_setmem (addr);
gd->fb_base = addr;
/******* 进入下一个界面 ********/
addr += size;
addr = (addr + (PAGE_SIZE - 1)) & ~(PAGE_SIZE - 1);
mem_malloc_init (addr);
#else
/******** armboot_real_end 在board-specific链接脚本中定义 *******/
mem_malloc_init (_armboot_real_end);
#endif /* CONFIG_VFD */
#if (CONFIG_COMMANDS & CFG_CMD_NAND)
puts ("NAND:");
nand_init(); /* NAND初始化 */
#endif
#ifdef CONFIG_HAS_DATAFLASH
AT91F_DataflashInit();
dataflash_print_info();
#endif
/********* 初始化环境 **********/
env_relocate ();
/*********** 配置环境变量,重新定位 **********/
#ifdef CONFIG_VFD
/* must do this after the framebuffer is allocated */
drv_vfd_init();
#endif
/* 从环境中得到IP地址 */
bd_data.bi_ip_addr = getenv_IPaddr ("ipaddr");
/*以太网接口MAC地址*/
{
int i;
ulong reg;
char *s, *e;
uchar tmp[64];
i = getenv_r ("ethaddr", tmp, sizeof (tmp));
s = (i > 0) ? tmp : NULL;
for (reg = 0; reg bd->bi_enetaddr);
#endif
#ifdef CONFIG_DRIVER_LAN91C96
if (getenv ("ethaddr")) {
smc_set_mac_addr(gd->bd->bi_enetaddr);
}
/* eth_hw_init(); */
#endif /* CONFIG_DRIVER_LAN91C96 */
/* 通过环境变量初始化*/
if ((s = getenv ("loadaddr")) != NULL) {
load_addr = simple_strtoul (s, NULL, 16);
}
#if (CONFIG_COMMANDS & CFG_CMD_NET)
if ((s = getenv ("bootfile")) != NULL) {
copy_filename (BootFile, s, sizeof (BootFile));
}
#endif /* CFG_CMD_NET */
#ifdef BOARD_POST_INIT
board_post_init ();
#endif
/* main_loop() 总是试图自动启动,循环不断执行*/
for (;;) {
main_loop (); /*主循环函数处理执行用户命令—common/main.c
}
/* NOTREACHED - no way out of command loop except booting */
}










 工商网监
工商网监
评论