倒立摆作为一种典型的控制系统实验装置,具有非线性、自然不稳定等特性,常用来作为检验某种控制理论或方法是否合理的典型方案。一阶倒立摆系统能用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、模糊控制及人工神经元网络等多种理论和方法都能在倒立摆系统控制上得到实现。
2022-02-10 11:46:56 3
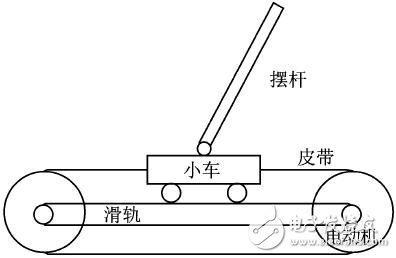
3 倒立摆制作全过程最近在练习pid的控制算法,就选用了2013年的电子设计国赛题目:倒立摆 。首先给你们看看我的成果注意哦:倒立摆不是靠上面黄色的传感器保持平衡的,而是通过下面的电机左右扭动使得摆杆
2022-01-14 11:28:5616 #具体操作写好倒立摆程序的关键是确定pid算法的程序和参数值。我根据网上查找的资料写了用stm32F407控制倒立摆的pid程序,现在我将程序分享给大家。我的程序主要是根据位置式离散pid公式pwm
2022-01-14 11:26:553 本人目前正在打算设计一个基于瑞萨M16C62P单片机的倒立摆程序。这个程序完成后的成果有点类似如下视频:http://v.youku.com/v_show/id_XMzczMjgwMTI0.html
2013-01-30 00:38:42
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的设置窗口。
2020-05-03 18:11:00 5971
5971 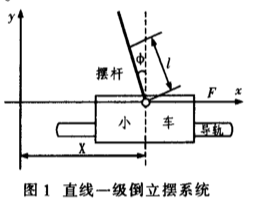
倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智能控制、模糊控制及人工神经元网络等多种理论和方法,都能在倒立摆
2020-05-03 10:29:001088 
本文档的主要内容详细介绍的是PID参数如何设定调节及倒立摆说明汇总与倒立摆程序免费下载
2019-10-29 08:00:007 自动起摆控制器Swing-up Controller能够控制直线一级倒立摆由静止下垂的稳定平衡状态自动转化到竖直向上的不稳定平衡状态,而无需给摆杆施加力的作用,就可以实现摆杆的自动摆起。
2019-08-23 08:05:007308 
本文档的主要内容详细介绍的是电子设计大赛倒立摆程序资料合集免费下载。
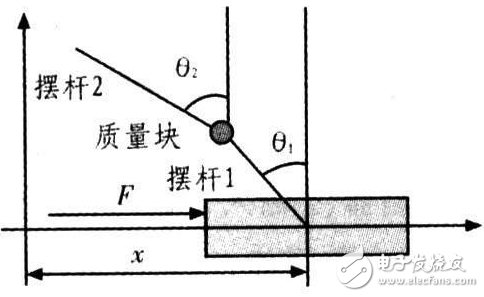
2019-01-16 08:00:0013 针对存在模型参数不确定性和外部扰动的直线型二级倒立摆系统的稳摆控制问题,对如何实现倒立摆系统鲁棒稳定的同时,还保证其达到期望的最优控制性能和H性能指标的稳定性控制问题进行了研究。基于状态反馈
2018-03-06 14:11:581 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是控制理论发展中的一个典型问题。目前,通过倒立摆系统验证过的许多控制方法在航天、机器人以及一般工业过程领域均有着广泛的应用。如航天飞机的姿态控制
2018-02-04 11:25:280 倒立摆PID算法源代码参考
2018-01-09 17:02:0720 倒立摆的matlab仿真
2018-01-02 20:00:5059 倒立摆是典型的重上支下的系统,具有多个特点,包括不稳定性、快速多变性、耦合性等,其系统成本低廉、结构简单、便于进行实验室操作。而且倒立摆具有多种功能,能对控制系统进行检验、对机器人的行走和火箭发射等
2017-11-09 14:50:5623 旋转倒立摆,用的是32F103的芯片
2017-10-27 17:18:003 通过对一阶旋转倒立摆系统原理的分析,选用单片机作为控制器,直流电机作为执行器,电位器式角度传感器作为反馈环节,采用PID控制算法设计实现了一阶旋转倒立摆控制系统。实验结果表明该系统在稳定的基础上具有
2017-10-19 15:21:0957 STM32,倒立摆
2017-07-29 14:38:5618 基于STM32的倒立摆系统
2017-04-08 08:55:1917 基于变量分组模糊控制算法的倒立摆系统_魏胜男
2017-03-16 08:00:000 一级倒立摆的PID控制设计
2016-11-08 18:51:1664 本文介绍了一种简易环形倒立摆控制系统的设计实现
2016-08-23 16:27:2420 旋转倒立摆源程序,有兴趣可以看看的。
2016-07-15 16:03:0937 为进行性线控制器的设计首先需要对被控制系统进行建模.二级倒立摆系统数学模型的建立
2016-06-14 15:29:5616 题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制
2015-12-11 11:06:5214 移动的倒立摆!资料来源网络,如有侵权,敬请见谅
2015-11-20 15:39:4012 基于MATLAB的模糊控制倒立摆系统研究,感兴趣的可以下载看看。
2015-11-03 13:49:5836 倒立摆系统是一种典型的控制系统模型,能够将实际与理论相结合,可以开发出新的控制算法来应用在系统模型之上。采用模糊控制算法研究二级倒立摆系统的控制问题,设计模糊控制
2012-08-29 15:04:08111 利用stm32控制平板倒立摆使用了红外遥控,pwm控制,串口调试角加速度传感器,里面就是代码。
2012-07-24 17:39:33209 本文建立一级倒立摆的数学模型,阐述了变速积分的PID优点,对一级倒立摆的变速积分的PID控制进行仿真,对比传统PID控制有明显的性能改进。
2012-02-03 17:14:5073 为实现二级倒立摆系统的实时稳定控制,以深圳固高直线二级倒立摆装置作为控制对象,在MATLAB环境下,利用基于二次型最优控制理论的线性二次型(Linear Quadratic Regulator,LQR)最优控制器
2012-01-18 15:07:3053 为了实现一级倒:芷摆系统自摆起和稳定控制,该文采用了最优控制与PID控制相结合的控制方法。首先,采用BangBang控制理论设计开环时间最优控制器,实现倒立摆的平稳快速摆起,同
2012-01-18 15:00:3491 倒立摆 系统是一个复杂的非线性系统本文建立了倒立摆的一种非线性数学模型在分析的基础上为倒立摆系统设计了一种模糊控制方案我们对一级倒立摆系统进行了控制取得了较好的效果
2011-07-06 18:19:4856 倒立摆 系统是一个复杂的!非线性的!不稳定的高阶系统 倒立摆的控制一直是控制理论及应用的典型课题分析了如何利用拉格朗日方程对直线柔性连接两级倒立摆系统建模采用法设计最优
2011-07-06 18:17:2242 在 智能控制 系统分层递阶结构的基础上,结合倒立摆的特点,根据被控对象的不同情况,分别采用了不同的看法,提出了基于分层递阶智能控制的倒立摆研究
2011-07-06 18:07:3625 在对 二级倒立摆 系统的动力学方程进行建模的基础上将其转化为线性定常系统的状态控制问题,提出了基于matlab的二级倒立摆控制系统
2011-07-06 18:05:25111 针对 倒立摆 的起摆控制建立了环形单级倒立摆基于拉格朗日方程的运动方程,在此基础上提出了能量控制的概念,并将能量补偿控制应用在环形单级倒立摆系统上,仿真和实际控制结果表
2011-07-06 18:03:4967 阐述了 倒立摆 实验系统及其在自动控制领域中的应用
2011-07-06 18:02:0353 本文详细地阐述了 倒立摆 系统及其在自动控制领域中的应用
2011-07-06 18:00:2257 对一维 倒立摆 系统的稳定和起摆进行了深入研究。通过$% 理论对系统进行坐标和输入量的变换,实现了系统的局部线性化,使得倒立摆系统的稳定控制不再需要对数学模型中的非线性
2011-07-06 17:59:0041 墓于 视觉伺服 的倒立摆系统可为机器视觉和智能控制领域的研究提供一个很好的实验平台。对该实验平台的视觉采集系统、运动控制系统和系统软件结构进行了详细的介绍, 对各组成部
2011-06-28 11:01:1534 固高科技的环形倒立摆系列产品采用开放的控制解决方案和模块化的实验平台,以旋转运动模块为基础平台,轻松构建环型一级倒立摆,环形串联两级倒立摆、环形并联两级倒立摆,甚至
2011-04-05 22:30:30136 倒立摆系统是多变量、非线性、强耦合的控制系统。采用模糊控制理论研究二级倒立摆控制问题。运用最优控制方法设计融合函数以降低模糊控制器的维数,减少模糊控制规则数,
2010-12-29 17:29:0846 针对多输入多输出的倒立摆系统平衡控制,利用牛顿-欧拉方法建立了直线型一级倒立摆系统的数学模型。在分析的基础上,采用状态反馈控制中极点配置法设计了用于直线型一级
2010-12-17 16:28:0254 概述
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中
2010-08-05 15:26:581333 倒立摆是控制领域中典型的被控对象。本文通过智能控制算法实现倒立摆的起摆控制。当摆杆的角度进入稳定区域时,通过PID控制算法使摆杆稳定。整个控制过程由基于DSP(Digital Sig
2010-08-05 15:24:5728 利用Lagrange 方程建立了系统的动力学方程,对n 级倒立摆系统的建模问题进行了具体研究,经过严密的数学推导,给出了n 级倒立摆系统建模的基本过程,获得了一组可普遍性地描
2009-12-14 13:55:4916 倒立摆控制系统是一个典型的高阶次、不稳定、多变量、非线性和强藕合控制系统。本文研究分析了单节倒立摆控制系统的数学模型,介绍了线性二次型最优调节器(LQR)的基本原
2009-09-02 16:38:2724 选用 LabVIEW 作为倒立摆控制系统的界面设计开发工具。为了在LabVIEW 图形化编程环境下使用倒立摆控制器Windows 环境下的动态链接库,本文将动态链接库中的函数全部转换设计为在LabV
2009-08-26 09:40:3527 本文针对LQR 控制在单级倒立摆控制中的不足,设计了一个LQR 结合PID 的复合控制。并在Borland c 语言环境下编写控制程序,成功实现倒立摆的控制,其控制效果比单一LQR控制的抗扰
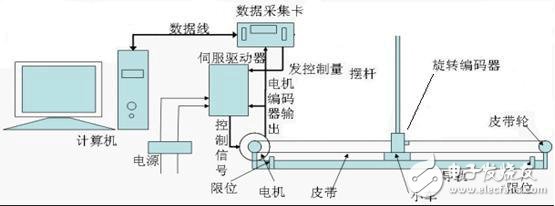
2009-08-15 10:54:1621 倒立摆控制系统是一个典型的高阶次、不稳定、多变量、非线性和强藕合控制系统。本文研究对象是基于研华公司数据采集卡PCI—1710—B 的倒立摆控制系统。通过对一级倒立摆系统
2009-08-15 08:13:4525 针对倒立摆的非线性采用T-S模糊控制的方法对倒立摆进行控制,建立了倒立摆的数学模型,并用Matlab 进行了仿真,仿真结果表明该控制方法对倒立摆具有好的控制效果。关键
2009-08-10 09:39:3215 本文在MATLAB 环境下建立了二级倒立摆的半物理实时仿真模型,并应用线性二次型最优控制策略,设计了一个二级倒立摆LQR 控制器。在实验中,运行该半实物仿真模型,成功的
2009-07-31 08:51:3127 本文简要说明了二级倒立摆系统及其建模,并分析了这个系统的特点。着重于建立一个单片机系统,在状态反馈的基础上实现对倒立摆的控制。关键词:倒立摆 单片机 状态反馈
2009-06-26 10:32:1349 本文以倒立摆控制系统控制为例,介绍Borland C++ Builder 在数据采集、处理中的应用,并根据系统控制算法控制电机左右运动,从而保证倒立摆能稳定地站立在竖直位置。关键词: C
2009-06-15 09:26:3127 为了有效解决倒立摆实验教学中器材相对不足,设计开发了基于计算机网络的倒立摆远程控制系统。它由实验用户、中心服务器、实验服务器和实验设备等四层组成,运用功能强
2009-06-01 14:23:0314 引言
倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智
2009-01-01 21:05:33672 
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论