 电子发烧友App
电子发烧友App


摘要:冷却风扇是大功率芯片(如CPU、FPGA和GPU)和系统的温度管理中的重要部件。不幸的是,它们有时会带来令使用者讨厌的音频噪声。通过测量温度并相应地调节风扇速度,在温度较低时可最大限度降低风扇速度(和噪声水平),但是在最坏情况下为防止芯片损坏,要提高速度。本文讨论了自动控制冷风扇速度的两种威廉希尔官方网站
。
高速芯片通常会逐渐变热。它们跑得越快就会越热。新一代的高速数字芯片使用了更小尺寸的工艺,允许降低电源电压,这会有一些帮助,但是晶体管数量的增加比电源电压的降低要快,因此功率水平仍然在上升。
当晶片温度上升时,性能会受到影响。参数改变、最大工作频率降低,而且定时超出规定。从用户的角度来看,发生这些情况时,产品不再正常工作。因此,冷却高速芯片的首要原因就是在尽可能长的工作时间和最宽的环境条件范围内保持良好的性能。满足参数规范的条件下,高速芯片的最大允许温度取决于工艺和芯片的设计方法(芯片工作在何种“接近边缘”的程度),以及其他一些因素。晶片典型的最大温度范围是+90°C至+130°C。
超出性能开始恶化的临界点工作时,过高的晶片温度会给晶片造成灾难性的损害。最大晶片温度通常远高于+120°C,并且由诸如工艺、封装和处于高温条件的时间等因素而定。因此,高速芯片需要被冷却以免达到性能恶化和导致永久性损坏的温度。
高速芯片很少使用单一的冷却威廉希尔官方网站 。实际上,一般需要结合多种威廉希尔官方网站 以确保高性能和持续可靠性。散热片、热管、风扇和时钟节流是高速芯片最常用的冷却手段。最后两个,风扇和时钟节流,能够帮助解决热问题,但它们会引入自身的问题。
风扇能大幅度地降低高速芯片的温度,但它们也能产生大量的音频噪声。全速运转的冷却风扇的噪声会令很多消费者厌烦,也正成为政府机构所关心的问题,即工作场所中为时已久的噪声效应。根据温度来调节风扇速度能明显地降低风扇噪声;当温度低时,风扇可缓慢运转(可非常安静),当温度上升时,则加速运转。
时钟节流—降低时钟速度来减少功耗—通过降低系统性能来发挥作用。当时钟被节流时,系统继续工作,但是在降低的速度下工作。很明显,在高性能系统中,只有在绝对需要时,即温度达到将停止工作时刻时,才能实行节流。
基于温度控制风扇速度或时钟节流需要首先测量高速芯片的温度。这可通过靠近目标芯片——直接相邻或有时在下面、或在散热片上放置一个温度传感器来实现。这种方式测量出的温度与高速芯片的温度相对应,但明显偏低(相差多达30°C),并且测量温度和晶片温度之间的差异会随着功耗的增加而增大。因此,电路板或散热片的温度必须与高速芯片的温度相关起来。
对于许多高速芯片,有更好的解决方案。许多CPU、图像芯片、FPGA和其它高速IC包含了一个“热二极管”,实际上是连接为二极管的双极型晶体管,位于晶片上。将远程二极管温度传感器与此热二极管相连,能够直接测出极其精确的高速芯片温度。这不仅绕开了在IC封装外测量温度时所遇到的大温度梯度问题,而且还消除了很长的热时间常数问题,从几秒到几分钟,提高了对于晶片温度变化的响应速度。
对于风扇控制的需求迫使设计者做出几个关键选择。第一个选择是调节风扇速度的方法。调节无刷直流风扇速度的常用方法是调整风扇的电源电压。这种方法可在电源电压最低到额定值的40%时很好地工作。但有一个缺点。如果使用线性调节器件来改变电源电压的话,则效率很低。使用开关电源可以获得更好的效率,但会增加成本和元件数量。
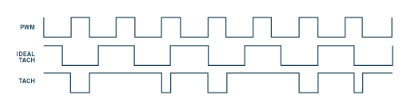
另外一个流行的风扇速度控制威廉希尔官方网站 是用一个低频PWM信号驱动风扇,一般在30Hz范围内,通过调整该信号的占空比来调节风扇速度。因为只用单个小开关管,因而这种方案的成本低廉。由于晶体管作为开关使用,所以效率很高。可是,该法的不足之处就是风扇会多少有些噪声,这是由脉冲方式的电源引起的。PWM波形的快速边沿会引起风扇的机械结构移动(有点像设计很差的扬声器),因而产生听得见的噪声。
另外一个风扇控制的设计选择是是否测量风扇速度,以便作为控制策略的一部分。除了电源和地,许多风扇都有第三根线,该线向风扇控制电路提供“转速计”信号。转速计输出在风扇每旋转一圈时产生特定数量的脉冲(例如两个脉冲)。一些风扇控制电路将这种转速计信号作为反馈,调节风扇电压或PWM占空比以获得期望的RPM。更简单的方法是忽略任何转速计信号,只调节风扇驱动加速或减速。该方案的速度控制精度较小,但成本更低,并且至少省却了一个反馈环,简化了控制系统。
在一些系统中,限制风扇速度的变化速率也很重要。当系统与用户非常接近时,这一点尤其重要。有些情况下简单地开关风扇或当温度变化时立即改变速度是可接受的。可是,当用户就在附近时,风扇噪声的突然变化会格外显著且令人讨厌。将风扇驱动信号的变化率限制在一定限度以内(如1%每秒)会最大限度降低风扇控制的听觉效果。风扇速度同样改变了,但不会特别引人注意。
另外一个重要的设计因素是风扇控制策略。通常情况下,风扇在特定的温度门限以下关闭,当超过门限后开始低速旋转(例如全速度的40%)。当温度上升时,风扇驱动随温度线性增长,直至100%的驱动。最佳斜率依赖于系统要求。更大的斜率一定程度上可获得更稳定的芯片温度,但当功耗随时变化时,风扇速度的变化量更大。如果目标是高性能,则应该选择起始温度和斜率,以使风扇在晶片温度高到足以启动时钟节流之前达到全速运转。
风扇控制电路可以多种方式实现。具有多达5个测量通道的多种远端温度传感器可直接检测高速芯片的温度,并将温度数据传送给微处理器。具有多个风扇转速计监视通道的风扇速度调节器可对风扇RPM或电源电压提供可靠的控制,并可接受来自于外部微控制器的命令。为了降低成本和简化设计,单片封装内包含了温度测量和自动风扇控制的IC已有市售。传感器/控制器一般也包含了过温检测,可用于时钟节流或系统关断,因而可避免高速芯片因过热而灾难性损毁。
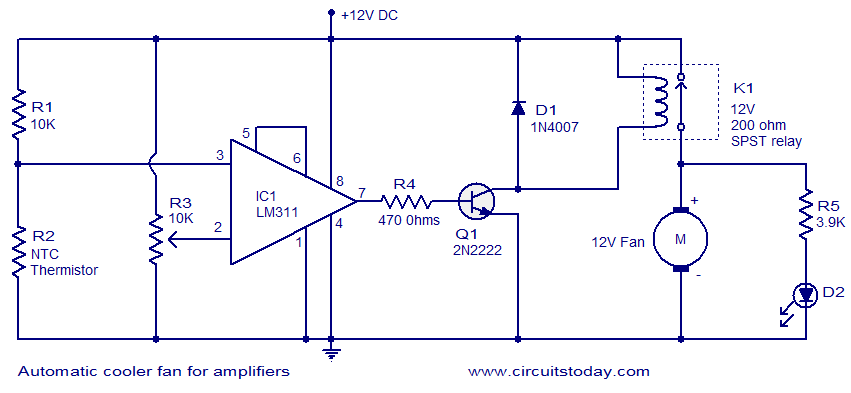
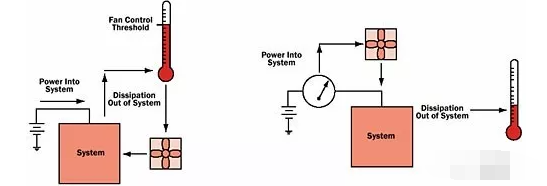
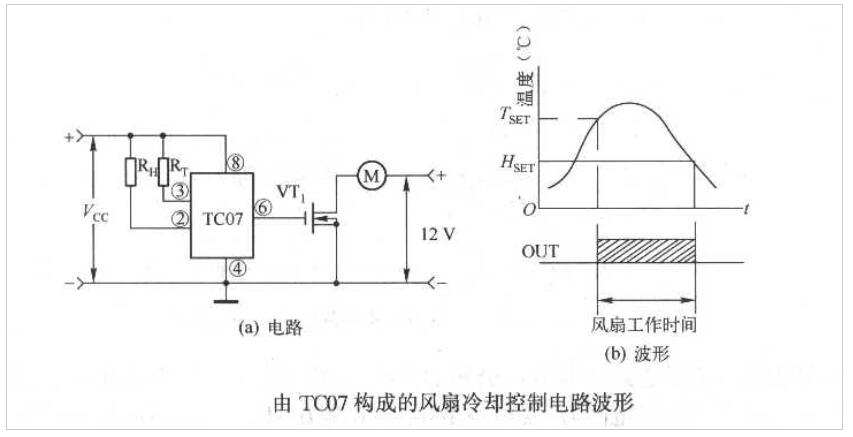
这种IC的例子有两个,一个是直流驱动,另一个是PWM驱动,如图1和2所示。图1中的IC远程检测温度并根据温度控制风扇速度。该芯片通过一个内部功率晶体管产生一个直流电源电压。图2中的IC具有类似功能,但通过一个外部晶体管以PWM波形来驱动风扇。两者都具备完整的热故障监测和过热输出,如果高速芯片太热可用来关断系统。
图1. 线性(直流输出)温度传感器和自动风扇速度控制器。根据高速芯片的温度自动控制风扇速度。风扇的转速计反馈允许风扇控制器直接调节风扇速度。系统关断输出防止高速芯片到达毁灭性温度。
图2. PWM输出的温度传感器和自动风扇速度控制器。根据温度来自动控制风扇速度。时钟节流和系统关断输出防止高速芯片达到毁灭性温度。将CRIT0和CRIT1管脚连接到电源或地可选择默认的关断温度门限,即使系统软件挂起时也能确保安全。
高速芯片通常会逐渐变热。它们跑得越快就会越热。新一代的高速数字芯片使用了更小尺寸的工艺,允许降低电源电压,这会有一些帮助,但是晶体管数量的增加比电源电压的降低要快,因此功率水平仍然在上升。
当晶片温度上升时,性能会受到影响。参数改变、最大工作频率降低,而且定时超出规定。从用户的角度来看,发生这些情况时,产品不再正常工作。因此,冷却高速芯片的首要原因就是在尽可能长的工作时间和最宽的环境条件范围内保持良好的性能。满足参数规范的条件下,高速芯片的最大允许温度取决于工艺和芯片的设计方法(芯片工作在何种“接近边缘”的程度),以及其他一些因素。晶片典型的最大温度范围是+90°C至+130°C。
超出性能开始恶化的临界点工作时,过高的晶片温度会给晶片造成灾难性的损害。最大晶片温度通常远高于+120°C,并且由诸如工艺、封装和处于高温条件的时间等因素而定。因此,高速芯片需要被冷却以免达到性能恶化和导致永久性损坏的温度。
高速芯片很少使用单一的冷却威廉希尔官方网站 。实际上,一般需要结合多种威廉希尔官方网站 以确保高性能和持续可靠性。散热片、热管、风扇和时钟节流是高速芯片最常用的冷却手段。最后两个,风扇和时钟节流,能够帮助解决热问题,但它们会引入自身的问题。
风扇能大幅度地降低高速芯片的温度,但它们也能产生大量的音频噪声。全速运转的冷却风扇的噪声会令很多消费者厌烦,也正成为政府机构所关心的问题,即工作场所中为时已久的噪声效应。根据温度来调节风扇速度能明显地降低风扇噪声;当温度低时,风扇可缓慢运转(可非常安静),当温度上升时,则加速运转。
时钟节流—降低时钟速度来减少功耗—通过降低系统性能来发挥作用。当时钟被节流时,系统继续工作,但是在降低的速度下工作。很明显,在高性能系统中,只有在绝对需要时,即温度达到将停止工作时刻时,才能实行节流。
基于温度控制风扇速度或时钟节流需要首先测量高速芯片的温度。这可通过靠近目标芯片——直接相邻或有时在下面、或在散热片上放置一个温度传感器来实现。这种方式测量出的温度与高速芯片的温度相对应,但明显偏低(相差多达30°C),并且测量温度和晶片温度之间的差异会随着功耗的增加而增大。因此,电路板或散热片的温度必须与高速芯片的温度相关起来。
对于许多高速芯片,有更好的解决方案。许多CPU、图像芯片、FPGA和其它高速IC包含了一个“热二极管”,实际上是连接为二极管的双极型晶体管,位于晶片上。将远程二极管温度传感器与此热二极管相连,能够直接测出极其精确的高速芯片温度。这不仅绕开了在IC封装外测量温度时所遇到的大温度梯度问题,而且还消除了很长的热时间常数问题,从几秒到几分钟,提高了对于晶片温度变化的响应速度。
对于风扇控制的需求迫使设计者做出几个关键选择。第一个选择是调节风扇速度的方法。调节无刷直流风扇速度的常用方法是调整风扇的电源电压。这种方法可在电源电压最低到额定值的40%时很好地工作。但有一个缺点。如果使用线性调节器件来改变电源电压的话,则效率很低。使用开关电源可以获得更好的效率,但会增加成本和元件数量。
另外一个流行的风扇速度控制威廉希尔官方网站 是用一个低频PWM信号驱动风扇,一般在30Hz范围内,通过调整该信号的占空比来调节风扇速度。因为只用单个小开关管,因而这种方案的成本低廉。由于晶体管作为开关使用,所以效率很高。可是,该法的不足之处就是风扇会多少有些噪声,这是由脉冲方式的电源引起的。PWM波形的快速边沿会引起风扇的机械结构移动(有点像设计很差的扬声器),因而产生听得见的噪声。
另外一个风扇控制的设计选择是是否测量风扇速度,以便作为控制策略的一部分。除了电源和地,许多风扇都有第三根线,该线向风扇控制电路提供“转速计”信号。转速计输出在风扇每旋转一圈时产生特定数量的脉冲(例如两个脉冲)。一些风扇控制电路将这种转速计信号作为反馈,调节风扇电压或PWM占空比以获得期望的RPM。更简单的方法是忽略任何转速计信号,只调节风扇驱动加速或减速。该方案的速度控制精度较小,但成本更低,并且至少省却了一个反馈环,简化了控制系统。
在一些系统中,限制风扇速度的变化速率也很重要。当系统与用户非常接近时,这一点尤其重要。有些情况下简单地开关风扇或当温度变化时立即改变速度是可接受的。可是,当用户就在附近时,风扇噪声的突然变化会格外显著且令人讨厌。将风扇驱动信号的变化率限制在一定限度以内(如1%每秒)会最大限度降低风扇控制的听觉效果。风扇速度同样改变了,但不会特别引人注意。
另外一个重要的设计因素是风扇控制策略。通常情况下,风扇在特定的温度门限以下关闭,当超过门限后开始低速旋转(例如全速度的40%)。当温度上升时,风扇驱动随温度线性增长,直至100%的驱动。最佳斜率依赖于系统要求。更大的斜率一定程度上可获得更稳定的芯片温度,但当功耗随时变化时,风扇速度的变化量更大。如果目标是高性能,则应该选择起始温度和斜率,以使风扇在晶片温度高到足以启动时钟节流之前达到全速运转。
风扇控制电路可以多种方式实现。具有多达5个测量通道的多种远端温度传感器可直接检测高速芯片的温度,并将温度数据传送给微处理器。具有多个风扇转速计监视通道的风扇速度调节器可对风扇RPM或电源电压提供可靠的控制,并可接受来自于外部微控制器的命令。为了降低成本和简化设计,单片封装内包含了温度测量和自动风扇控制的IC已有市售。传感器/控制器一般也包含了过温检测,可用于时钟节流或系统关断,因而可避免高速芯片因过热而灾难性损毁。
这种IC的例子有两个,一个是直流驱动,另一个是PWM驱动,如图1和2所示。图1中的IC远程检测温度并根据温度控制风扇速度。该芯片通过一个内部功率晶体管产生一个直流电源电压。图2中的IC具有类似功能,但通过一个外部晶体管以PWM波形来驱动风扇。两者都具备完整的热故障监测和过热输出,如果高速芯片太热可用来关断系统。
图1. 线性(直流输出)温度传感器和自动风扇速度控制器。根据高速芯片的温度自动控制风扇速度。风扇的转速计反馈允许风扇控制器直接调节风扇速度。系统关断输出防止高速芯片到达毁灭性温度。
图2. PWM输出的温度传感器和自动风扇速度控制器。根据温度来自动控制风扇速度。时钟节流和系统关断输出防止高速芯片达到毁灭性温度。将CRIT0和CRIT1管脚连接到电源或地可选择默认的关断温度门限,即使系统软件挂起时也能确保安全。











 工商网监
工商网监
评论