 水下机器人亟待解决的关键威廉希尔官方网站
问题
水下机器人亟待解决的关键威廉希尔官方网站
问题
世界海洋总面积约为3.6×108平方千米,占地球总面积的70.8%,在广阔的海洋中,蕴含着非常丰富的生物资源、矿物资源和海洋能源。其中最具经济开采价值的是海底的石油和天然气资源,海洋石油资源储量占世界总储量的1/3。海洋油气资源的开发从上世纪90年代开始迅猛发展,我国海洋油气资源的开发利用也在快速发展。随着陆上油田资源逐渐枯竭,产量逐年下降,海洋油气产量在全国油气产量中的比重越来越高。在海洋油气开发过程中,使用水下机器人可以提高工作效率,水下机器人可以潜深到潜水员到达不了的水深,克服潜水员在深水工作遇到的困难等等。人们研制的性能多样结构各异的载人潜水器,是在潜水球和潜艇威廉希尔官方网站 微型化基础上发展起来的。
一、常规水下机器人介绍
ROV(RemoteOperated Vehicle)全称遥控水下机器人,也称为遥控式水下无人潜航器,属于水下无人潜航器(UUV)的一种,主要用于水中观察、检查和水下施工。另一类型的水下无人潜航器被称作AUV,全称自主式水下机器人,也称为自主式水下无人潜航器,其研制始于20世纪50年代,其特点是无需携带缆绳,行动更灵活。
起初,水下机器人的发展是出于军事等方面的需求,由美国、俄罗斯、日本、法国等国率先研制,因水下机器人的研制离不开计算机威廉希尔官方网站 、声纳威廉希尔官方网站 、水下微光电视、遥控威廉希尔官方网站 、定位导航等威廉希尔官方网站 的发展。后来,海洋石油工业的迅速发展带动了工业型ROV的发展,北海油田和墨西哥湾油田在1975年使用了第一台商业化ROV,至1981年,ROV数量猛增到400多台,现如今各种类型、各种功能的ROV数量已数不胜数。本文主要讨论的是商业型或称为工业型的水下机器人。
⒈.水下机器人分类
工业用水下机器人功能多种多样,所完成的水下作业也极富多样性,按照不同的分类标准,现有的水下机器人一般分为:
(1)按用途分为观察型、观测型和作业用水下机器人。作业用水下机器人一般安装有机械手,用于海中救援、打捞、电缆敷设、海洋石油及其他生产系统的操作维修等水下作业。观测型水下机器人与作业用水下机器人基本相同,但它主要用于测定所要调查对象的参数。观察型水下机器人一般只具备影像观察功能,利用照相机、摄像机、声纳等观测海底地形、地貌或搜寻水下沉物。
(2)按水下机器人与施工母船之间有无电缆可分为有缆水下机器人(即ROV)和无缆水下机器人(即AUV)。有缆水下机器人与施工母船之间通过电缆相连,由母船向水下机器人提供动力和实施遥控;无缆水下机器人与母船间无电缆连接,AUV自带动力,依靠自身的动力航行。
(3)按运动方式可分为浮游式、履带式和步行式水下机器人。浮游式水下机器人在水中漂浮,一般呈零浮力(或稍有一点正浮力)状态,依靠所装的推进器在水下做三维空间运动。履带式水下机器人多用于海床施工,例如挖沟机、挖沟犁等。
⒉.水下机器人的主要功能
水下机器人本身仅是一种运载工具,如欲进行水下作业,则必须携带水下作业工具。可以说,水下作业系统是水下机器人工作系统的核心,根据作业目的的不同,可以选择携带不同的水下作业系统。可以携带水下作业系统的功能特性,使水下机器人扩大了适用范围,增强了实用性。现有水下机器人的作业系统通常包括1~2个多功能遥控机械手和各种水下作业工具包。主要功能有:海底观察海底地形、地貌、作业状态等;测定相关参数;水下作业中螺栓的拆装及阀门的开闭;水下施工中所用缆绳的系结与切割;水下救助和打捞;水下设施打磨和切割;水下构件或船体表面的清洁;水下钻孔、焊接。
⒊.水下机器人的主要组成
水下机器人一般由潜水器本体、水下观察设备、检测设备、导航定位设备(深度传感器、罗经、航速仪等)、机械臂、脐带缆、控制台、下放装置等组成。领航员在施工母船上通过控制台对水下机器人进行远程操作,完成特定的水下作业。ROV与控制台之间一般通过脐带缆将电力、液压、视频和数据及控制信号等相连,AUV同样有控制台,但没有脐带缆。
二、水下机器人在海洋石油工程中的应用
海洋石油工程中使用的ROV在外形、结构、功能等方面大致与常规ROV是一致的,只是机械臂或所携带的工具更具石油工程的特点。海洋石油工程应用的ROV大多装备4~8个液压推进器,根据作业目标选用具备相关功能的机械手,通常为一到两只,功能一般为视频摄像、抓握物体、剪切缆绳/钢丝绳、打开/关闭阀门、拆卸螺栓/法兰/卡环、水下焊接、水下火焰切割等。此外,还装备以下设备:定位系统、电罗经、测深传感器、左右舷悬臂摄像头、转动/倾斜摄像头、扫描声纳等。
海洋石油工程中使用的ROV,根据观察和作业能力可分为三类。第一类为纯观察型,只能完成水下纯粹的观察、录像作业,不携带任何水下作业工具和设备,一般用在海管着泥点监测、导管架下水观测、海床平面调查等作业中;第二类为作业型,通过安装不同作业功能的机械手,完成水下较为复杂的工作,此类型ROV是海洋石油工程中使用频率最高的;第三类为爬行类,主要指挖沟机和挖沟犁等,用于海底管道、海缆的挖沟埋设作业。
⒈.ROV在导管架安装中的作用
⑴地貌调查。导管架安装前,利用ROV对导管架安装区域的海底地貌进行地貌检查,确认是否存在自然坑、桩腿坑、海底异物等情况,如存在海底泥面不平的情况,需要根据情况做进一步填平处理。
⑵导管架扶正过程中的支持。导管架下水后,必须将导管架的姿态进行调平、扶正,利用ROV测量导管架防沉板与海床面的距离、角度、接触情况等,施工人员根据以上信息控制导管架下放。根据导管架的不同设计情况,有时还需要ROV在水下打开部分阀门,以实现导管架下水后的姿态调平。
⑶导管架定位。ROV行进到导管架立管口或其他标记处,标记深度、艏向、坐标等信息。
⑷引导插桩。利用ROV协助观察,确保导管架钢桩顺利插入喇叭口,有时需要引导钢桩下放至喇叭口插桩,并引导吊桩器泄压回收。
⑸监控打桩。在打桩作业时,必须使用ROV引导打桩锤套桩,在套桩成功后,还要监测打桩情况,例如钢桩角度,入泥情况,设备工作状态等。
⑹灌浆作业。钢桩打到位后,钢桩与导管架桩腿之间的空隙要进行灌浆固定。使用ROV监控氮气、淡水清洗桩脚内壁与桩外壁夹缝过程,并对该过程进行跟踪监控,将信息反馈给灌浆操作方。根据导管架的不同设计,有的导管架还需要ROV打开或关闭部分阀门以完成灌浆作业。
⑺辅助安装。在以上施工中,通过使用ROV剪切一些辅助安装的缆绳/钢丝绳、浮球浮筒等设施,拆卸/安装卡环等。
⑻导管架安装后调查。导管架安装作业完成以上全部施工过程后,还要使用ROV做进一步的系统检查,检查灌浆后桩脚底部与海床面的接触情况、导管架各阀门开关状态是否正确、导管架上各设备是否完好等,并保留相关视频影像,得到最终的导管架安装后调查报告,至此,导管架整个安装作业才算完成。
⒉.ROV在海底管线铺设中的作用
(1)ROV携带水下测量设备完成海底管线的位置、损伤、埋深、异物等工作。
⑵剪切一些辅助安装的缆绳/钢丝绳,如起始缆,剪切辅助安装的浮球浮筒等设施,拆卸安装卡环。
⑶水下观测工作:对管线的损伤情况、着泥点监控、废物堆积、管线悬跨、牺牲阳极以及管线的支撑、膨胀弯、注水装置和软管连接装置等进行巡航观测。
⑷电位测量:测量每根管线的阴极保护电位。
⑸管线悬跨测量:使用声纳测量管线悬跨长度。
⑹水下摄像:对整条海管的状态做录像保存,特别是缺陷、异常和管线的重要部位等的记录。
⑺水下作业:深海海管铺设中的膨胀弯安装过程,需要使用ROV完成法兰、螺栓等的拆装。
三、水下机器人的发展趋势
⒈.新式AUV是未来发展趋势
有缆水下机器人虽然通过电缆可以更好地实现供能和遥控,但限制了水下机器人的灵活性、活动范围以及作业种类,随着作业水深的增加,电缆长度及电缆阻力将增大,导致水下机器人的动力消耗增加,作业空间受到限制。由于水对电磁波的干扰,长久以来无缆遥控面临着难题,如何除去ROV携带的电缆长期困扰着科学家们。
随着科技的进步特别是硬件威廉希尔官方网站 和控制威廉希尔官方网站 的发展,新式AUV应运而生,它实现了无缆化,自带供能模块,活动范围大大提高,且能依靠自身的自动化控制能力来完成所赋予的工作,具有机动性好、智能化、安全性高等优点,在海洋油气资源开发中发挥的作用越来越大。
⒉.水下机器人尚待解决的关键威廉希尔官方网站 问题
水下机器人是高威廉希尔官方网站 的集成,虽然水下机器人本体的各种材料及相关威廉希尔官方网站 已基本成熟,但随着水下机器人向大范围、大深度、长续航、多功能的发展,一些关键威廉希尔官方网站 还需研究解决,例如:
⑴水下通讯问题。有缆水下机器人可以用电缆很好地实现信息传输,但电缆又限制了水下机器人的功能。无缆水下机器人的操控信号目前是以水声通讯来实现的,存在传输延时现象,因声音在水中的传播速度远低于光速,从而导致难以对水下机器人实时控制。而且传输距离又受载波频率和发射功率的限制,目前通讯距离仅10千米左右。另外,声通讯还容易受到多径效应造成的干扰,虽然可采用窄波速,但也存在波束对准和跟踪等问题。美国利用蓝绿激光实现了空中对水下100m深处潜艇的通讯,激光通讯的研发为水中大范围通讯开辟了一条新路,但目前蓝绿激光器的体积过大,效率低,能耗大,尚不能用于无缆水下机器人。
⑵能源问题。有缆水下机器人一般不存在能源问题,但如果在深海作业,随着电缆的增长,传输损耗也会增大。虽然可提高电压和加大频率,但会产生绝缘和安全问题。而对于无缆水下机器人,自带供能模块所存储的能源量是限制其作业范围的主要因素,可以考虑燃料电池,但目前在水下机器人中尚未得到应用,需要进一步研究开发。
⑶控制问题。有缆水下机器人的控制比较简单,可由操作人员通过操作台实现人机交互控制。但水下机器人在水中的运动有六个自由度,它本身是一个强耦合的非线性系统,加上局部水流方向、流速都是无规则变化的,动力定位控制系统的刚度很难满足定点作业的要求,这有待进一步研究。无缆水下机器人由于信息传输问题而难以实现实时控制,往往要求实现自治式控制或智能控制。但由于控制对象为6自由度,交叉耦合、非线性、时变性都非常严重,因此其控制威廉希尔官方网站 十分复杂,要进一步研究开发。
-
水下机器人
+关注
关注
2文章
94浏览量
13639 -
ROV
+关注
关注
2文章
10浏览量
15919
原文标题:水下机器人在海洋石油工程中的应用
文章出处:【微信号:jingzhenglizixun,微信公众号:机器人博览】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
FCB-EV9520L,水下机器人应对光线变化的利器
高压放大器在水下扑翼软体机器人研究中的应用

焊接机器人智能化的关键威廉希尔官方网站 有哪些

创想智控激光焊缝跟踪系统协同松下机器人自动焊接高机贴板的应用
凯茉锐电子 SONYFCB-EV7100模组在水下机器人中的创新应用

Al大模型机器人
其利天下威廉希尔官方网站 ·搭载无刷电机的扫地机器人的前景如何?
FMEA与智能机器人:提升机器人可靠性与安全性的关键
鳍源全球首创QY-MT智测系统:引领水下机器人迈向AI无损测量新时代
搬运机器人已经成为提高效率、降低成本的关键威廉希尔官方网站

新威廉希尔官方网站 让水下机器人拥有“触觉”
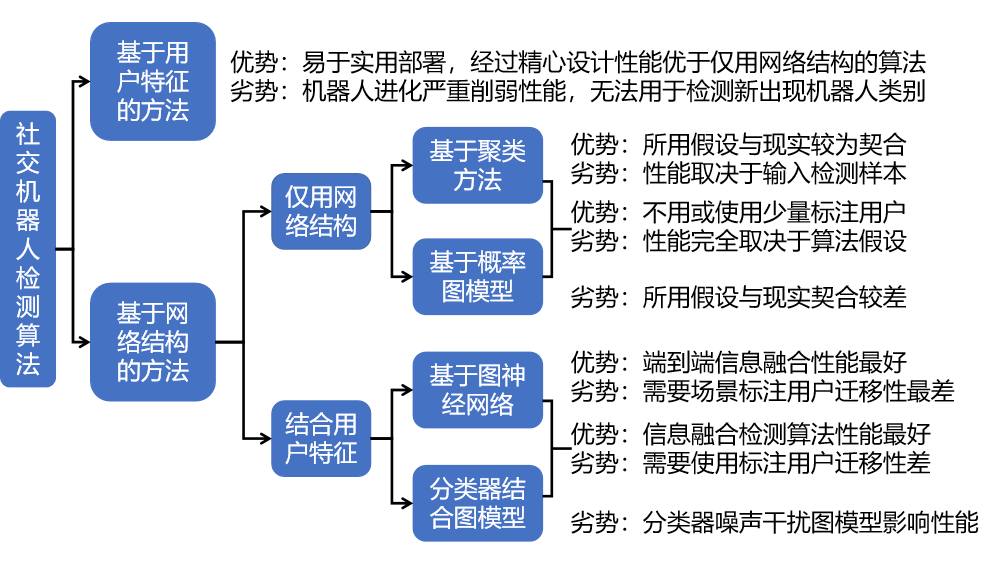
网络社交机器人检测的关键威廉希尔官方网站
LabVIEW的六轴工业机器人运动控制系统
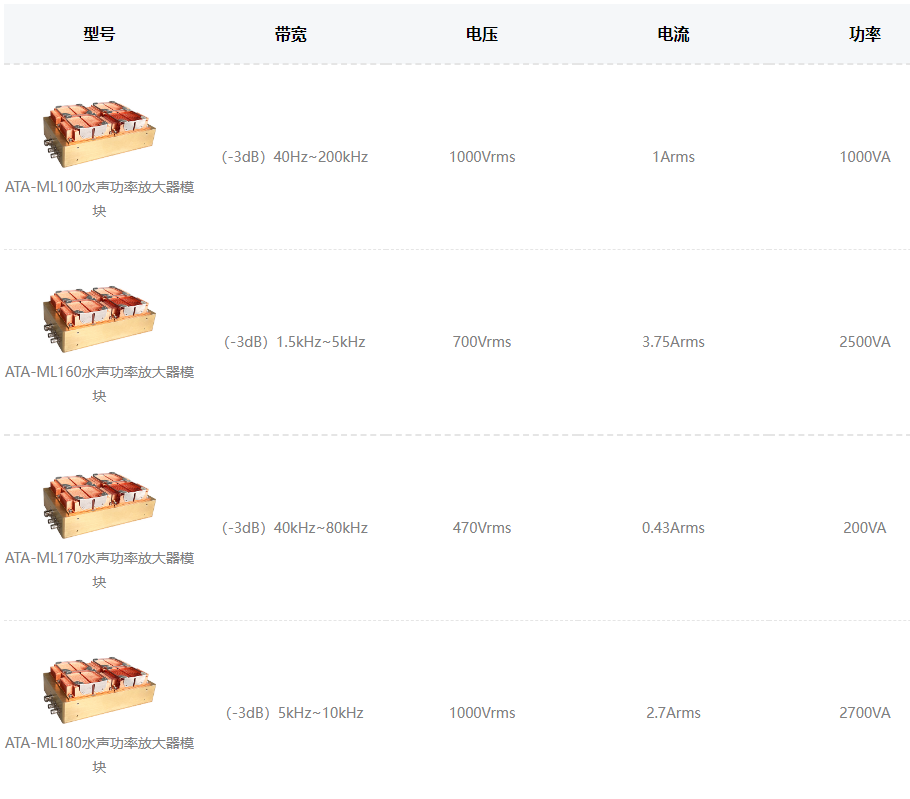
功率放大器模块在水下机器人中的应用有哪些





 工商网监
工商网监
评论