 神奇的粒子机器人
神奇的粒子机器人
没想到吧,像细胞一样自由组合灵活多变的机器人正在从科幻电影中走出来。就像在伤口愈合是活细胞聚集并集体迁移的过程。在生物系统中,群体的大规模集体迁移是通过组件的耦合和协调来实现的,在伤口愈合的过程中,活细胞聚集并集体迁移。
受到生物机制的启发,来自麻省理工学院、哥伦比亚大学等机构的研究人员开发了一种粒子机器人,这种粒子机器人可以成群结队地移动、运送物体和完成其他任务,并且可以根据外界环境自主的改变集群的形状,具有超强的灵活性和健壮性。
2019年3月20日,国际权威学术期刊《自然》杂志以封面论文的形式报道了这项研究成果,来自中国的李曙光作为该论文署名第一作者。
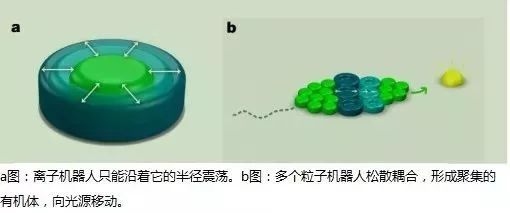
粒子是如何动起来的呢,不妨让我们来看看这个客观的实验过程,研究人员制作成功了一种只能沿半径方向扩张和收缩的粒子机器人(如a图),当多个例子机器人组成集群(松散耦合)时,能够自主地向光源移动(如b图)。
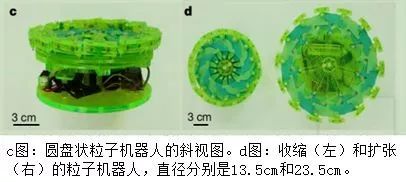
这种粒子机器人是由圆盘状单元组成(如c图),圆盘状单元收缩时直径约为15.5cm,扩张时直径约为23.5cm(见d图)。
粒子集群在没有外部光源刺激的情况下,只能随机移动;当有外部光源刺激时,集群可以朝光源移动。如果在集群和光源之间设置一个有缝隙的障碍物,集群也可以挤过这个缝隙,继续向光源运动。在运动过程中,集群还可以搬运微小物体。
值得注意的是,这些粒子机器人之间的通信是广播式的,即不是通过一个个的“口耳相传”,因此可以增加或删减机器人,而不影响集群的整体运动。
为了证明集群的稳健性,研究人员用虚拟仿真威廉希尔官方网站 interwetten与威廉的赔率体系 了多达10万个粒子机器人的集群,发现哪怕多达20%的粒子机器人出现故障,集群仍能继续工作。
粒子机器人由圆柱形基座、电池、小型电机、传感器、微控制器、通信组件以及安装在顶部的霍伯曼飞行环(一种常见的儿童玩具)组成。
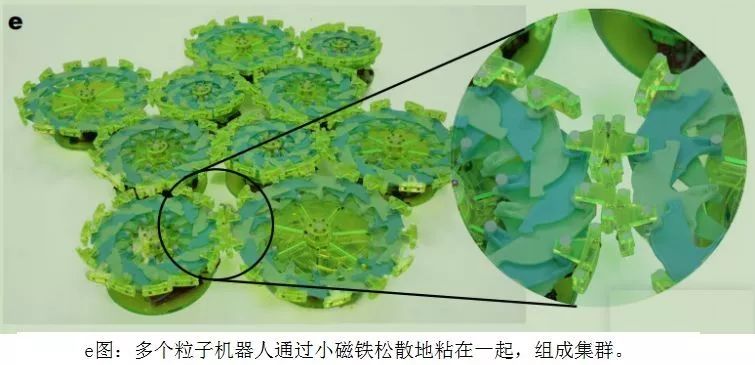
霍伯曼飞行环上有许多小面板,每个小面板上都安装有两个小磁铁。这些小面板连接成一个圆形,可以展开和收缩。当多个粒子机器人通过小磁铁松散地粘在一起时,就组成了一个粒子机器人集群(见e图)。
为了使集群协调地运动,其中的诀窍是给粒子机器人编程,让它们按照精确的顺序扩张和收缩,从而推动整个集群向光源移动。为了做到这一点,他们开发了一种算法,该算法可以使粒子机器人的传感器接收到其粒子机器人广播的光强信息。
粒子机器人的传感器用于检测外界光源发出的光强大小。假设光强等级分为1到10级,离光源最近的粒子机器人的接受到的是10级,最远的接收到的是1级。光强等级决定粒子机器人扩张或收缩的特定顺序:接收到10级型的光强粒子机器人首先扩张、收缩,紧接着接收到等级为9级光强的机器人扩张、收缩,以此类推。
粒子机器人的未来
粒子机器人的关键和新奇之处在于:“它不用集中控制,没有固定的形状,而且它的部件也没有独特的标识,每个粒子机器人都是各自独立的,没有任何个性化的身份信息。” 研究人员说:“下一目标是将粒子机器人微型化,并且制造出由数百万个微型机器人组成的集群。”
这种微型机器人最具有前景的应用领域是生物医学,因为微型机器人集群可能会受化学梯度、氧梯度或癌组织环境pH值变化的影响而作定向运动,因此可以实现靶向药物递送的功能,这对于未来的癌症治疗和药物研发方面具有非常大的价值。此外,还具有诊断、探测、修复等应用潜力。
-
微控制器
+关注
关注
48文章
7547浏览量
151333 -
传感器
+关注
关注
2550文章
51046浏览量
753142 -
机器人
+关注
关注
211文章
28390浏览量
206957
原文标题:NATURE 人工智能 | 神奇的粒子机器人
文章出处:【微信号:aicapital,微信公众号:全球人工智能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
医疗机器人有哪些_医疗机器人有哪些应用
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人

柔性机器人与刚性机器人区别与联系

Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下威廉希尔官方网站 ·搭载无刷电机的扫地机器人的前景如何?
工业4.0中的机器人向协作机器人演进
「喜报」迈步机器人荣获机器人应用典型案例奖

特种机器人的定义与分类






 工商网监
工商网监
评论