 高精度地图如何应用于自动驾驶系统
高精度地图如何应用于自动驾驶系统
高精度地图对自动驾驶汽车定位、导航与控制,以及数据的实时更新,都起到至关重要的作用,是自动驾驶走进现实的关键一环。禾多科技地图及interwetten与威廉的赔率体系 器负责人戴震博士在SAE 2019大会报告中,解释了高精度地图对于自动驾驶的必要性,并结合禾多科技的多传感器融合威廉希尔官方网站 方案,深度解析如何把高精度地图应用于自动驾驶系统中,以及自动驾驶将怎样助力高精度地图实现商业化。
2019年5月21日,SAE 2019 新能源与智能网联汽车威廉希尔官方网站 大会在安亭上海国际汽车城盛大开幕。新能源汽车和智能网联汽车是目前以及未来汽车行业威廉希尔官方网站 发展的两大核心。本次威廉希尔官方网站 大会,共设置2个分会场,分别围着新能源汽车整车研发、电池威廉希尔官方网站 与发展、燃料电池、电机与驱动系统,以及智能网联汽车威廉希尔官方网站 、“芯-路-云”、高精地图测绘、验证和测试等话题开展。
禾多科技研发总监,地图及模拟器负责人戴震博士在会上,解释了高精度地图对于自动驾驶的必要性,并结合禾多科技的多传感器融合威廉希尔官方网站 方案,深度解析如何把高精度地图应用于自动驾驶系统中,以及自动驾驶将怎样助力高精度地图实现商业化。
以下为戴震博士发言实录:
主持人:戴震博士是德国锡根大学的博士,曾任职于德国航空航天中心,为戴姆勒公司研发了世界上第一套基于NDS地图的汽车导航系统,现在任禾多科技地图和模拟器负责人。接下来有请戴震博士为大家做主题演讲,掌声有请。
戴震:大家下午好,感谢SAE提供这样一个机会,让我可以代表禾多科技跟大家进行交流,今天,我主要是想从自动驾驶的方案提供商这个角度,讲一下我们是如何使用高精度导航电子地图的。
高精度地图:让自动驾驶“心中有谱”
未来出行在我们定义当中主要分为三个场景。一是高速公路的自动驾驶,第二个是城市工况,也就是说城区内的自动驾驶,第三个就是最后一公里,以泊车场景为代表。
禾多科技目前聚焦在两个主要场景。首先就是高速公路,我们高速公路自动驾驶解决方案叫做HoloPilot,它是一个L3.5级别的解决方案,HoloPilot使用的是量产化的配置,主要是利用了现有的车规级传感器和计算单元,以及高精度地图来实现在高速公路上的自动驾驶功能。其次是以代客泊车为代表的最后一公里场景,我们的智能代客泊车系统叫做HoloParking,是L4级别的解决方案,驾驶员仅需在固定点交接车辆,即可实现车辆自主寻找车位、停车入库、取车等代客泊车功能。
刚才我们说到这两个场景虽然千差万别,但实际上在应用地图这个角度来讲,有很多相似的地方。首先,我们需要先有地图数据,然后根据定位、感知、控制决策等各个模块的需求,把地图数据打包,按照特定的内容、特定的格式、特定的方式来传递给各个模块。以上这些操作实际上就是我们导航引擎所包含的主要工作范畴。
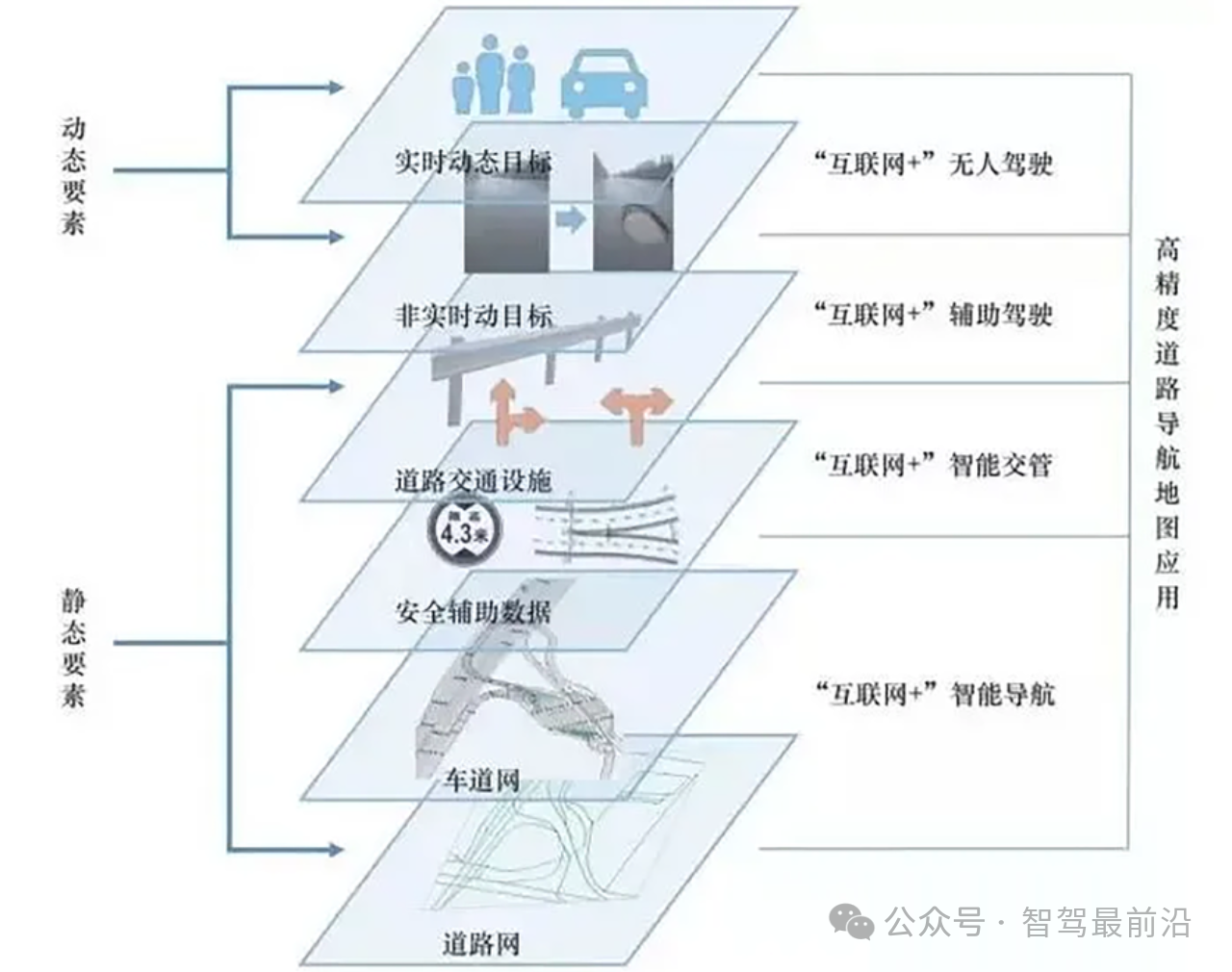
下面我们先看一下在高速公路场景下高精地图的基本呈现。就像这幅画里所展示一样,我们用的更多是矢量信息和语义信息。大家可以看到清晰的车道线,龙门架,路牌、路杆等地图要素。我们也主要是利用这些要素来进行诸如定位、感知、控制决策等等操作。
接下来,这是一个停车场的高精度地图的呈现,除了常见的车道信息以外,我们也可以看到关于停车位的几何描述,很多大型周边建筑物的几何描述,还有关于路口的信息等等。利用这些信息我们可以实现点到点的定位和导航。
自动驾驶实际上是一个多模块融合的系统。地图在系统当中需要与其他模块产生交流、产生碰撞,自动驾驶系统中的各个模块,比如说定位、规划、控制、感知等等,每个模块都有其独特的需求,我们地图模块需要给这些模块提供定制化的服务,传递它们需要的数据,帮助各个模块能够更安全地完成自己的工作。
高速公路场景下的高精度地图导航
高精度地图在高速公路自动驾驶系统中的导航有三个主要工作,路径规划、地图匹配、导航指令。这与传统车载地图导航的内容基本一致,但是从具体的实现上会有一些延伸,因为在自动驾驶系统中,地图导航的受众从人变成了计算机,所以每个模块的内容、体量也都会有变化。
接下来我会通过跟传统导航的比较来介绍,我们是怎么做路径规划、地图匹配等操作的。
地图匹配
地图匹配的功能在于给出定位点,然后需要把这个定位的点对应到高精度地图中,计算出所在车道的编号以及车辆在当前车道中的相对位置。
从自动驾驶的角度来说,高精度地图提供的导航信息需要从街道级别升级到车道级别。我们必须拥有在各种场景之下都能做到车道定位的能力。这些场景包括在车道中心行驶、车辆变道等。
路径规划
路径规划也需要做到车道级别。我们平时用的导航中有一些比较标准通用的策略,比如说最快路径、最短路径、大路优先等原则。但作为自动驾驶系统中车道级别的导航或者路径规划,目前还没有最优路径这样的通用定义。换句话讲,没有所谓的最优路径,只有最符合各自的解决方案的路径。如果某个路径能够应用于你的方案,成功地将车辆从A点导航到B点,那么这就是最适合你的路径,这需要结合每家的方案来制定。举个例子,比如说有的自动驾驶车辆可能配速不是很高,只能达到80公里每小时。那么在这种情况之下,最左侧的车道显然不能在路径规划中经常出现,因为那样可能会延缓交通流的顺畅。
导航指令
导航指令的意义在于通过给车辆发送实时执行的指令,让车辆能够在既定路径上行驶。实现这个功能的前提是,我们需要对前方路口的类型进行精确描述,比如前方是主路还是匝道分岔,是否在封路,是否有合流处或分流处等等,通过这些场景描述,再判断这个动作点应该做如何反应。
导航指令主要分两类。第一类是指示型指令,往往清晰简单,就像我们平时导航一样,比如说向左变道、向右变道等等。当控制器收到这些指令时,会结合当时的路况,选择合适的时机来执行这些动作,这和传统导航非常相似。第二类指令是引导型指令,是传统导航中没有的。引导型指令更多出现在路口交汇处、匝道等复杂区域,这些区域的车道线一般比较复杂,这会对感知产生很大的挑战。所以在这种情况之下,地图可以产生轨迹的引导线,让车辆沿着引导线通过复杂的路口,到达指定区域。
高精度地图如何应用于自动驾驶系统
刚才我通过跟传统导航的比较,介绍了自动驾驶中的导航。接下来,我会介绍高精度地图是如何应用于高速公路自动驾驶系统的,主要分定位、感知跟控制决策这三个模块来说明。
辅助定位
首先介绍一下高精地图是如何来辅助自动驾驶定位模块的。禾多科技的定位模块使用了多传感器融合的方案,摒弃了昂贵而不符合车规的高线束激光雷达,而是使用了视觉、毫米波雷达等符合量产标准的传感器,通过传感器结果和高精度地图的匹配来实现横向、纵向的高精度定位。
先说横向定位,我们可以获取到车身坐标系里关于车道线的几何描述,同时也可以从高精度地图里提取关于车道的先验信息。把这两个信息进行匹配就可以做到横向纠偏。这跟人类驾驶习惯是一样的,我们也是通过眼睛来找寻车道线,让车辆保持在车道的中心,以这样的方式来驾驶车辆的。
在纵向上,可以通过对路牌的识别来实现定位。基于语义分割、2D/3D转换、边缘检测等威廉希尔官方网站 ,我们能够分期把3D的路牌从图像中提取出来,然后把边缘信息或者角点信息和高精度地图预留的先验信息进行比较,就可以纠正纵向上定位的偏差。
辅助控制决策
控制决策是自动驾驶系统非常核心的模块,需要整合各模块资源,其中也少不了高精度地图,比如说我们经常说到的像地图的曲率、坡度、侧倾角度等等这些要素都是控制决策模块需要考虑的。举一个简单例子来表达高精度地图对于控制模块的作用,当车辆位于主路,马上要进入匝道时,车道会从一道直接分成两道,出现一条新的车道线,对于车道线感知的挑战非常大。而当车辆到达匝道分流区域之前,高精度地图会发出一条引导线,车辆会沿着引导线一直通过这个区域,直到进入车道线清晰的位置为止。
辅助感知
高精度地图对于感知模块也有很多帮助,感知是自动驾驶系统中计算量最大的一个模块,因为它需要处理大量周边静态动态障碍物的信息。在高速公路场景下,得益于结构化的道路设计,实际上能够真正对行驶产生安全影响的都是同方向车道上的车辆,所以我们可以利用地图以及当前的位置对前方可行驶的区域做预测。比如行驶时,系统可以基于车辆当前位置,对前方一二百米感知范围内会出现的车辆进行集中排查,而无需过多关注在这个范围之外的车辆,很大程度上降低了对于计算资源的消耗。
同时,高精度地图里有很多先验信息能够对感知的分割、识别提供重要辅助,比如我们常见的引流带或隔离带这些突兀的路况变化,以及经常遇到的匝道、高架桥、隧道等。有了地图的先验信息,就可以很好地辅助感知模块进行判断。
众包地图更新
和传统导航相比,自动驾驶对于高精度地图的应用的另一个区别是,传统导航更多是简简单单的地图使用,而自动驾驶更多还要承担地图信息反馈的角色。
我们能够利用视觉传感器,对于像车道线、路牌等道路信息进行感知,然后与已有的高精度地图进行对比,把差异化的信息按照既定格式上传给图商,图商就能够对这些海量数据进行深度学习,作为高精地图的更新。
智能代客泊车自动驾驶系统中的高精度地图应用
刚才说的是关于高速公路自动驾驶系统的地图导航的一些工作,下面我简要介绍一下我们在停车场内是如何使用高精度地图的。禾多科技的智能代客泊车系统 HoloParking 采用了车端、停车场端和高精地图端“三端合一”的威廉希尔官方网站 方案,一方面,我们将激光雷达和大部分算力转移到了场端,解决了过车规的问题。另一方面,通过三端协作,实现多传感器、多角度的冗余,提高停车周围环境的感知能力,能够支持全天候、全场景下的真实运营。无论是在光线严重不足的环境下,还是在人车混流、突发状况较多的复杂停车场,或者是遇上雨雪、大风等恶劣的天气,HoloParking 都能正常运行,为用户提供安全、稳定的代客泊车服务。
在高精地图端,我们主要是利用车道之间的拓扑关系来进行点到点、多路径的路径计算,保证能够实现多车调度的算法。同时车辆也可以利用车道的宽度信息,在车道内进行合理避障。刚才大家看到的这个视频实际上就是我们HoloParking 在真实运营时进行多车调度的表现。
-
导航
+关注
关注
7文章
528浏览量
42406 -
自动驾驶
+关注
关注
784文章
13787浏览量
166406
原文标题:高精地图导航:让自动驾驶心中有谱
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
一文聊聊自动驾驶测试威廉希尔官方网站 的挑战与创新

自动驾驶中常提的SLAM到底是个啥?


l4级别自动驾驶的特点是什么
为什么自动驾驶中全球导航卫星系统如此重要?
自动驾驶无图方案真的可行吗?
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
抛弃高精度地图旧模式,走向视觉感知新时代?
自动驾驶仿真测试实践:高精地图仿真

康谋威廉希尔官方网站 | 自动驾驶:揭秘高精度时间同步威廉希尔官方网站 (二)

自动驾驶:揭秘高精度时间同步威廉希尔官方网站 (一)

特斯拉与百度合作扫清自动驾驶关键障碍
未来已来,多传感器融合感知是自动驾驶破局的关键
自动驾驶地图研究:SD pro MAP快速上车,助力城市NOA轻地图智驾方案






 工商网监
工商网监
评论