 仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop
仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop
Roboshop是一款由仙知机器人自主研发的用于移动机器人应用的专业级客户端软件。软件集成了机器人控制、地图构建与编辑、机器人建模等移动机器人应用中常用的功能,旨在为用户提供快速、准确、稳定的移动机器人解决方案。它具有以下几个鲜明的特点:
可视化操作,简单又快捷
传统的移动机器人在执行任务的时候,工作站点基本是固定不变的,如果面对现场需求变更,重新调整目标位置与工作任务,需要专业工程师打开编辑器,即时修改代码来完成任务序列的变更。这样操作的先决条件是有专业工程师,另外还需要花费大量的时间,既费时又费力。
仙知机器人自主研发的可视化操作软件Roboshop,从基础的地图构建,站点、路线及区域的编辑,到机器人的自动标定、工作任务及任务链编辑都能快速实现。与传统产品比较,最大的优点在于无需专业的工程师编写代码,一般人在学习Roboshop使用指南之后可简单上手,经过仙知培训之后便可轻松掌握。
界面友好,一览无余
可视化操作软件Roboshop的界面与大家熟知的CAD、Photoshop等电脑软件界面十分相似,从菜单栏、工具栏到属性栏,甚至比CAD、Photoshop的界面更加友好。

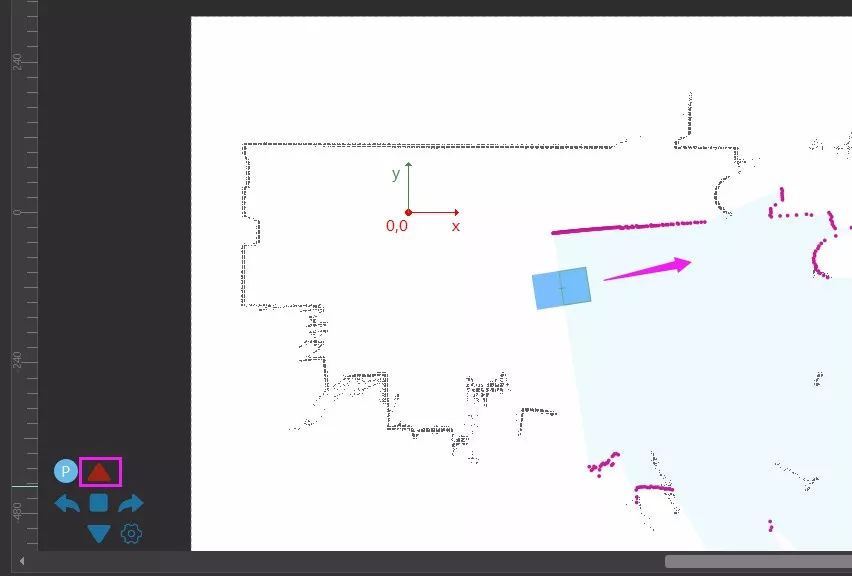
单从机器人运行状态一个点来介绍,它会显示机器人的硬件参数、运动状态、导航信息、机器人基本信息的详细参数。比如运动状态下的机器人位置、实际速度、旋转半径、接收速度、置信度、阻挡、最近障碍物、阻挡传感器ID、抱闸、急停,真正做到了让机器人的实时状态一览无余。
支持自主建模,可适配性强
仙知的可视化操作软件Roboshop,支持自主创建机器人模型。打开机器人模型创建面板,可通过“使用引导创建”“使用模板创建”“使用默认方式创建”三种方式进行自主建模。
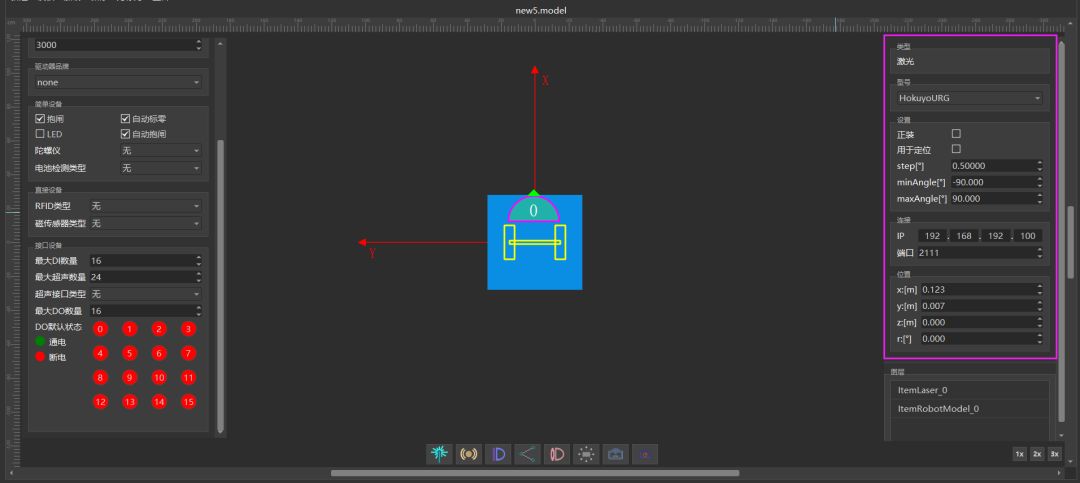
通过模型编辑,配置激光、超声、DI、DO、磁传感器、RFID、相机等硬件的参数,便可实现机器人模型创建,而且仙知的Roboshop适配性极强,可广泛适配当前市场上主流的激光品牌、驱动器和电池等。
人性化设计,超凡使用体验
无论是背景皮肤还是内在设计,仙知的可视化操作软件Roboshop的设计都非常人性化。软件的背景皮肤设计了白昼模式和夜间模式,让使用者无论是在白天还是晚上,操作时都能拥有舒适的使用体验。
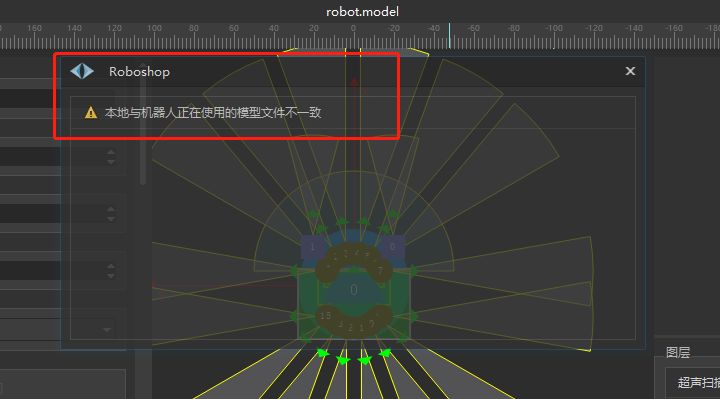
在内在设计上,由于人为操作存在不可避免的失误,Roboshop提供人性化的报错提示,当错误发生时,软件系统会自动报错并进行提示,大大降低了由于人为操作失误带来的不可预估的危险。
除了上述介绍的几个鲜明的特点外,仙知的可视化操作软件Roboshop还隐藏了很多实用功能。比如在地图构建时,如何操作会使机器人扫描的地图与实际场景更匹配;在路径导航编辑时,如何让机器人按照曲线行驶;如何设定区域优先级等等。总之,这是一款智能、专业、便捷的可视化操作软件。
-
移动机器人
+关注
关注
2文章
758浏览量
33557 -
人工智能
+关注
关注
1791文章
47034浏览量
238005
原文标题:【同川精密 | 前沿】仙知机器人可视化操作软件Roboshop:智能、专业、便捷
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论