 长城汽车自动驾驶开发的安全DNA
长城汽车自动驾驶开发的安全DNA
无论是特斯拉的事故还是Uber的事故,都离不开自动驾驶的安全。
自动驾驶应该定义或者扩张为一个广义的、颠覆整个汽车行业,或者是颠覆所有行业的驾驶威廉希尔官方网站 ,因为物流、农业、工业、矿区等行业都可以用自动驾驶解决。解决的前提是什么呢?要有足够的安全。要有足够安全性,保障系统是可靠的,系统决策是正确的,起码要保证系统不会出致命的事故,所以任何自动驾驶系统都离不开安全。
2019第四届ADAS与自动驾驶论坛于3月21-22日在上海召开,论坛由CCIA智能网联专委会与佐思产研主办,地平线、纵目科技、中科慧眼、中电昆辰、富兰光学、创景科技等单位支持。
长城哈弗威廉希尔官方网站 中心主任工程师甄龙豹在论坛上发表了题为“长城汽车自动驾驶开发的安全DNA”的演讲,以下是演讲全文。
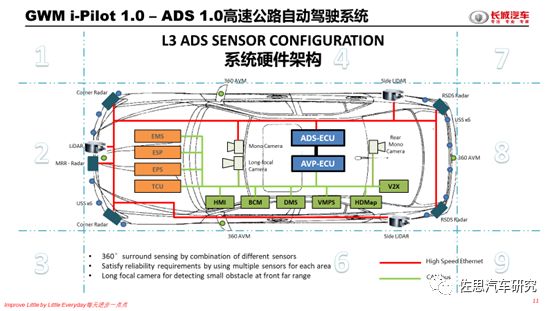
首先看一下自动驾驶汽车是由什么组成的?广义上的自动驾驶汽车分两部分,第一部分是自动驾驶系统ADS,第二部分是传统的车辆平台(AutonomousVehicle Platform,简称AVP)。车辆平台由传统执行机构ESP、EPS,交互系统HMI等组成。
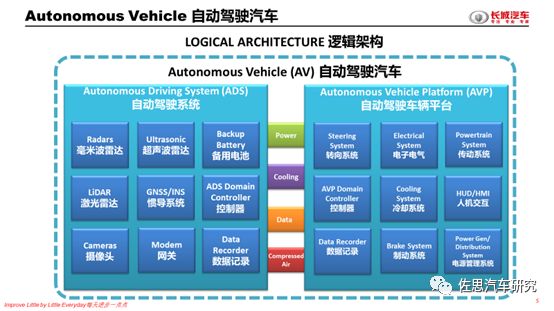
自动驾驶系统包含雷达、超声波、环视、定位、控制器、数据记录等。
其他还包括冗余架构、冷却系统、冗余电源、电源管理系统等。这两个系统之间通过以太网或者其他车载网络进行数据交换。
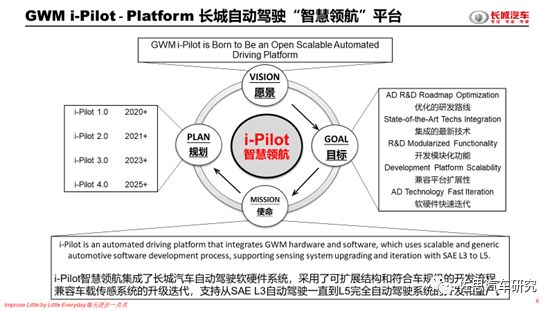
为了更好应对ADS和AVP的开发,长城推出了智能领航平台i-Pilot。i-Pilot是从L3开始的。i-Pilot愿景是开放、可扩展的自动驾驶平台,目标是优化研发路线,集成业内最新威廉希尔官方网站 ,开发模块化功能,兼容平台拓展性,实现软硬件的快速迭代。
I-Pilot智慧领航集成了长城汽车自动驾驶系统,采用了可扩展结构,符合车规级开发流程,兼容车载传感器系统的升级迭代,支持从L3自动驾驶一直到L5完全自动驾驶系统的开发和量产。

上图是长城汽车的自动驾驶开发路线图,目标是2021年实现高速公路的自动驾驶,里面包含上下匝道自动处理。判断高速公路自动驾驶智能化程度,最简单的区分是是否支持上下匝道自动处理。如果它不支持,那它是不完整的。
I-Pilot 2.0现在更多是作为研发性项目,实现城市自动驾驶,服务于共享出行,无人送货等。
I-Pilot 3.0将1.0和2.0进行整合,形成服务于城市和高速公路自动驾驶的I-Pilot3.0。
I-Pilot 4.0是利用更新的传感器,更新一代的威廉希尔官方网站 架构,更新一代完整威廉希尔官方网站 ,升级迭代打造4.0。当然现在只是一个概念,因为届时有什么最新的威廉希尔官方网站 ,有什么最新的传感器,谁也无法确定。
现在已经量产的车辆平台里面,换挡、制动、扭矩等各个方面都采用了线控。2.0会实现完整的车辆备份控制,包括所有的备份。3.0、4.0实现新架构、新迭代的优化,成本更低,更好为社会服务的平台。
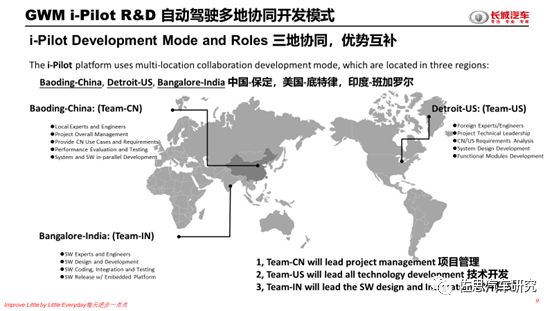
长城汽车现在采取中、美、印三地协同研发。很多人不理解,开发自动驾驶系统,为什么要搞这么多研发机构?举一个最简单的例子,长城的i-Pilot是首先立足服务于中国,最后服务于全球。着眼点不单单是中国。在中国上市以后,会逐步推到德国、美国,如果不了解当地情况,自动驾驶系统会满足当地的交规和驾驶习惯吗?
美国高速具有中国高速所不具备的其他特征,如不同的红绿灯,高速上有十字路口等。特斯拉致死事故就是在高速的十字路口导致的,这在中国高速里面是完全想象不到的。
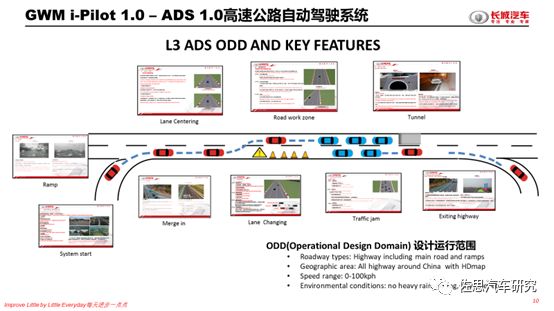
高速公路的自动驾驶系统有一系列的情况。拿换道来说,是由于前车车速太慢,驾驶员要去快车道行驶,不想在慢车道上走,还是由于其他驾驶员的主观意图介入?这是换道意图的产生;然后进行换道可能性的判断,有没有别的车在抢相邻车道?后车是不是不会突然加速?等等。换道就会有不下一百个工况的研究,因此不管仿真也好,还是实际上路测试也好,还是测试设备上测试也好,都要不断发掘,打造系统可靠性和完整性。
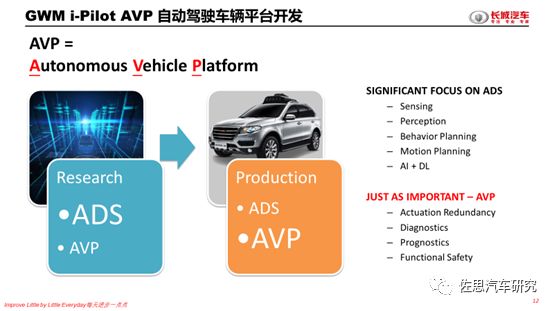
长城的AVP是车辆本身的执行平台。因为我们发现业内企业将过多精力集中在自动驾驶威廉希尔官方网站 本身,威廉希尔官方网站 再好,威廉希尔官方网站 落地也需要车辆平台的支撑,否则威廉希尔官方网站 再好也是没法落地的。所以AVP同样重要。

2018年8月27日长城VV6发布会上,长城汽车正式加入了百度的Apollo开放车辆认证平台。
10月24日,长城与AtonomousStuff宣布为中国市场共同开发和部署自动驾驶车辆平台。新推出的ORA电动车R1,也完全支持线控处理,目前长城已经形成燃油与纯电双引擎自动驾驶车辆开发平台,以更好的支持业内自动驾驶系统开发及落地。
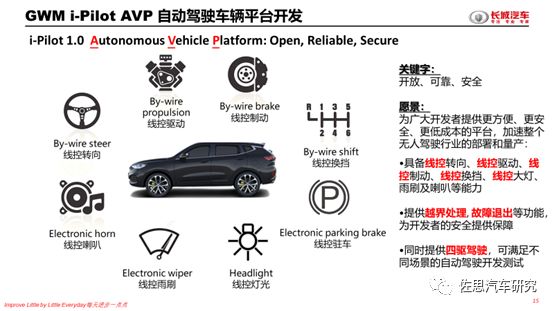
长城自动驾驶车辆开发平台具备线控驱动、线控制动、线控换档、线控大灯、线控雨刷等功能,为广大开发者提供方便、安全、更低成本的平台,加速整个无人驾驶行业的部署和量产。同时VV6提供四驱驾驶,可满足不同场景的自动驾驶开发测试。
下图描述了ISO26262和SOTIF的应用。

功能安全方面,有自动驾驶系统安全分析的方法论。整体来说,从用户需求导出图谱,整体形成逻辑架构定义,从逻辑架构定义本身进行分析,最后执行系统安全架构。
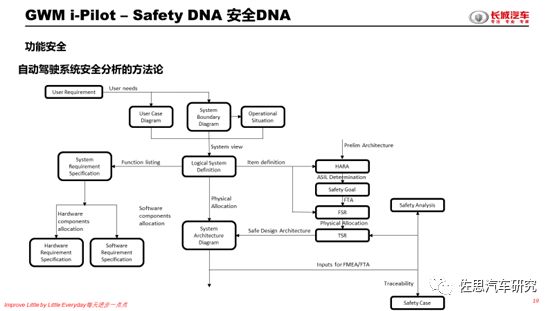
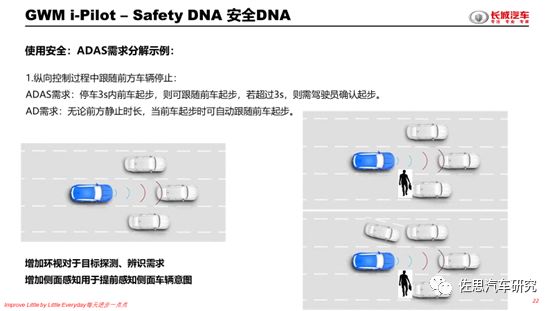
使用安全方面从三大维度考虑,第一是传统的ADAS需求是什么,第二拟人化的需求是什么,第三本身系统限制是什么。由这三点导出系统配置和系统架构。
比如ADAS需求, ACC停车以后,一般都是三秒内前车起步的话,系统可以自动起步,三秒以后需要驾驶员确认起步。经过调查发现,停车三秒之内,一是人对于周围环境的记忆和感知是不会产生太大变化的,二是人的注意力会保持集中,这是三秒的来源。过了三秒以后,周围的环境会产生很大变化,很多信息会从人的记忆里面抹去;同时过了三秒以后,人的注意力会产生分散,有很多其他的额外动作产生。
另外一个是拟人化的分析需求准则。人类的可视距离是非常远的,在条件空旷、周围环境清晰的条件下,人的可视距离可达到一公里以上。所以人有更多时间来应对道路维修和路面上的掉落物,可以及早进行规避。这个决策动作完全是人自身决定的。现在任何的传感器,都不具备远距离微小物体的探测能力,比如路面的凸起。这会导致什么情况?当发现路面有掉落物的时候,如果在五六十米才感知它的话,自动驾驶系统已经不足以把车安全刹停了。哪怕刹停了,也不敢保证后车不追尾。
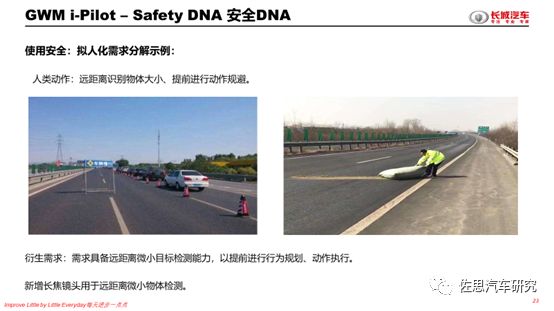
基于这个角度,长城开发了长焦摄像头,探测距离150米以外,可看到150米左右路面凸起的微小物体,只要高度大于20厘米左右(大于这个尺寸会对系统造成安全影响),可以感知出来,甚至可对它进行完整的区域划分。凸起物属于哪一个区域,是压过去还是骑着过去,针对不同区域划分,进行不同的系统操作。
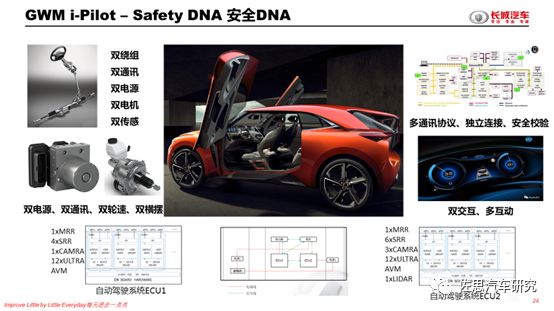
长城车辆平台的安全系统ECU都有两份,包括传感器接入两个不同的ECU,由不同的ECU处理不同数据,两个ECU之间进行数据通讯,两个ECU之间进行不同连接,传感器进行不同的电源连接,以此保证当其中一套传感器失效以后,有另一套传感器可以继续使用。保证车辆能在紧急情况下将人安全送到另一个区域。整个执行平台,都是双份的,包括双电源、双电机、双轮速、双横摆等。
从人机交互层面,采用了HUD多维信息感知,使得交互系统的一套失效以后,还有另外一套可以清晰告诉驾驶员系统信息。针对单点失效和多点失效都进行完整的系统操作,包括安全驾驶员监管、当前车辆停车、应急车道停车以及下个服务区停车,以保证驾驶人员的安全。
一些研究表明,自动驾驶汽车在没有任何死亡事故情况下,安全行驶2.75亿英里,才能证明它和人类可以融合。这个准则可以应用于国内的道路吗?2.75亿英里的道路组成应该是什么样的呢?高速占多少,市区占多少?还是全部是高速或全部是城郊?
Waymo实车测试超过1000万英里,仿真测试超过50亿英里。仿真和实车测试是必须同时进行的。
用仿真来验证决策是不是安全没有问题,可是用仿真验证感知的安全,并不是好方法。因为传感器的仿真到现在为止,没有任何的仿真平台能够做到对传感器真值的仿真相关性达到100%,或者99.99%。
-
自动驾驶
+关注
关注
784文章
13812浏览量
166451 -
长城汽车
+关注
关注
0文章
254浏览量
8055
原文标题:长城汽车自动驾驶开发的安全DNA
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
长城汽车如何行稳致远
长城汽车Coffee Agent大模型通过生成式AI服务备案
长城汽车山海炮通过澳洲ANCAP五星安全认证

德赛西威AR-HUD前沿产品亮相长城汽车总部
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
吉利与Foretellix合作开发自动驾驶汽车
禾赛科技与长城汽车达成战略合作,共同推进智能驾驶威廉希尔官方网站 发展
禾赛科技与长城汽车深化合作,共同推进激光雷达项目研发落地
禾赛科技与长城汽车共同推动多款ADAS激光雷达项目研发落地
长城汽车与意法半导体举办汽车电子交流日活动
理想、长城、极氪、小米宣布!合作英伟达!





 工商网监
工商网监
评论