 可用于制造“软体机器人”组件的动态水凝胶问世
可用于制造“软体机器人”组件的动态水凝胶问世
布朗大学(Brown University)的研究人员使用一种能够动态响应环境的新型双聚合物材料开发出一套模块化水凝胶组件,可用于各种“软体机器人”和生物医学应用。
据报道,布朗大学(Brown University)的研究人员使用一种能够动态响应环境的新型双聚合物材料开发出一套模块化水凝胶组件,可用于各种“软体机器人”和生物医学应用。
这种由3D打印机制作而成的组件能够弯曲、扭曲或粘在一起,以响应对特定化学品的处理。在发表在《高分子化学》(Polymer Chemistry)期刊的论文中,研究人员展示了一款柔软的夹具,能够按需驱动拾取小物件。他们也设计了类似乐高的水凝胶积木,可以精细组装,然后紧紧密封在一起,以形成定制化微流控装置,可用于药物筛选、细胞培养和其他应用的“芯片实验室”系统。
研究人员表示,新材料所具备功能的关键是其双聚合物成分。
布朗大学工程学院近期毕业的博士生、论文主要作者Thomas Valentin表示,“本质上,一种聚合物能够提供结构完整性,另一种能够实现动态行为,如弯曲或自粘合。因此,将两者放在一起生成的材料会优于各部分相加的总和。”
当水凝胶中的聚合物链彼此栓在一起时,水凝胶会固化,该过程被称为交联。有两种类型的键合可将交联聚合物整合起来:共价键和离子键。共价键相当强大,但不可逆转。一旦两条链共价连接,断裂链会比破坏键更容易。另一方面,离子键没那么强大,但是可以逆转。添加离子(具有净正电荷或负电荷的原子或分子)将导致键的形成,去除离子则会导致键的分离。
针对这种新材料,研究人员将一种共价交联的聚合物(PEGDA)和另一种离子交联的聚合物(PAA)结合在一起。PEGDA的强共价键将材料结合在一起,而PAA的离子键使其具有响应性。将材料置于富含离子的环境中会导致PAA交联,意味着该材料会变得更坚硬并收缩。将离子撤走,随着离子键断裂,该材料又会软化并膨胀。相同的方法也使得材料在需要时能够自粘。将两个单独的部件放在一起,添加一些离子,这些部件就会紧密地连接在一起。
这种强度和动态变化的结合,使研究人员能够制造出柔软的夹具。他们将每个夹具的“手指”制作成一面是纯PEGDA材料,一面是PEGDA-PAA的混合物。添加离子导致PEGDA-PAA面收缩并强化,将两个抓手拉到一起。研究人员表示,这种机制非常强大,能够举起重约1克的小物件,且能够抵抗重力“拿住”物件。
布朗大学工程系副教授Ian Y. Wong表示,“大家都对能改变形状并自动适应不同环境的材料很感兴趣,因此我们展示了一种可以弯曲并重新配置自身以响应外部刺激的材料。”
研究人员同样表示,该材料更直接的应用可能是微流控威廉希尔官方网站 领域。
水凝胶对微流控装置而言是受欢迎的材料,尤其是生物医学测试应用领域。它们像人体组织一样柔软且具有弹性,通常是无毒的。问题在于通常难以在微流控装置中用水凝胶制作复杂的微通道和腔室。
但是这种新材料,以及它所涵盖的乐高积木概念,提供了一种潜在的解决方案。3D打印允许复杂的微流控结构融入每个小块。然后可以使用套接配置,更像是真正的乐高积木将这些小块组装起来。将离子添加到组装好的小块中可以形成防水密缝。
Valentin指出,“模块化乐高积木非常有趣,因为我们可以为微流控装置创建预制工具箱。你可以随时使用不同的微流控结构保留各种预置部件,然后选择制作自定义微流控链路所需的部件。然后将其组装起来就可以了。”
研究人员表示,在使用前长期存放这些小块也不成问题。
布朗大学的本科生、论文共同作者Eric DuBois表示,“这项研究测试用的样本有些是三个月或四个月之前的,因此我们认为这些材料可以在很长一段时间内保持可用。”
研究人员表示他们将致力于研究该材料,未来可能会调整聚合物的性质,以获得更高的耐用性和功能性。
-
机器人
+关注
关注
211文章
28414浏览量
207044 -
水凝胶
+关注
关注
0文章
26浏览量
9115
原文标题:【沛作品全集】HI-FI珍藏限量版 HDCD甄选9张专辑组合套装
文章出处:【微信号:new_audiophile,微信公众号:新音响】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
【「具身智能机器人系统」阅读体验】+初品的体验
南京大学:研发水凝胶传感器动态保水新策略

高压放大器在水下扑翼软体机器人研究中的应用


【开源项目】你准备好DIY一款功能强大的机器人了吗?
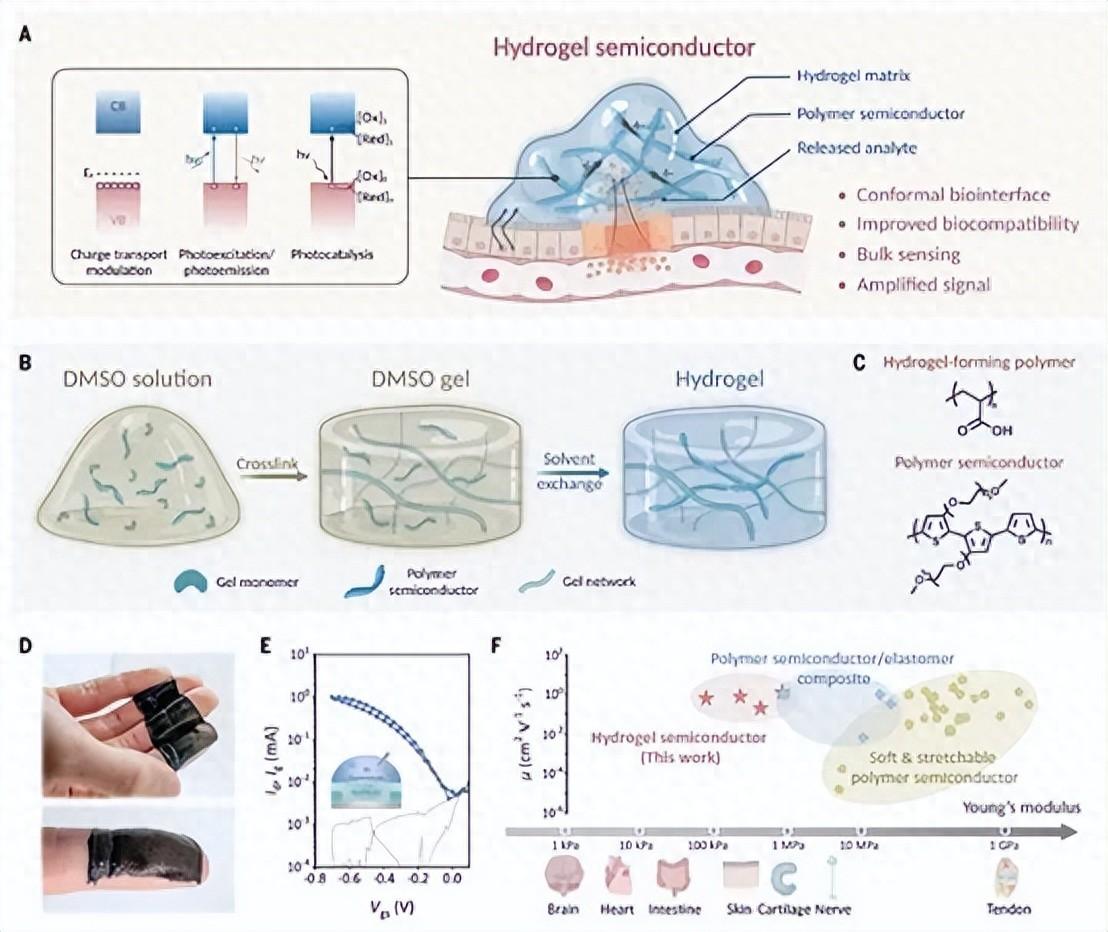
水凝胶半导体材料问世,有望用于生物集成电路
高压放大器在介电弹性体折纸术软体机器人中的应用

清华大学:软体机器人柔性传感威廉希尔官方网站 最新研究进展

Al大模型机器人
Aigtek:介电弹性体高压放大器在软体机器人研究中的应用

基于计算设计的超鲁棒性应变传感器,实现软体机器人的感知和自主性

高压放大器在介电弹性体折纸术软体机器人中的应用
用于水质和病毒监测的电驱动软体机器人开发






 工商网监
工商网监
评论