 库卡机器人Profibus通信的步骤
库卡机器人Profibus通信的步骤
【导语】对于工业机器人来说通讯一直是一个很重要的环节,在学习中一般会觉得有些困难,但是通讯都有固定的套路,只要认真学习和实践慢慢就会掌握,小编特意整理了库卡机器人Profibus通信的步骤,一起来学习吧!
一:配置要使用的倍福模块文件
1、确定要添加的倍福模块型号,本例需配置的是EK1100和EL6731(0010)从站模块;
2、从倍福官网下载这两个模块的配置文件;
3、打开Work Visual4.0;
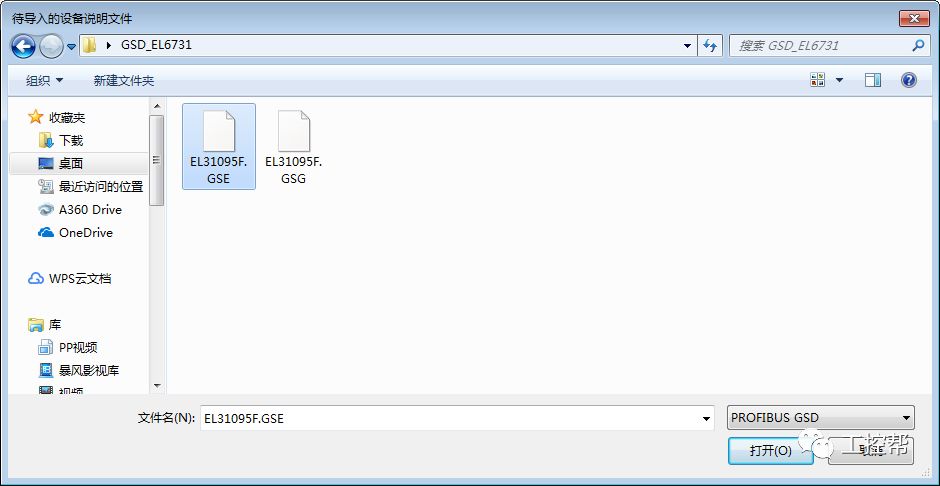
4、在不打开任何项目的情况下依次点击:文件>>Import/Export>>导入设备说明文件>>继续>>查找>>根据不同的文件夹右下角选择显示EtherCATESI或PROFIBUS GSD 格式 >>选择你要添加的文件>>打开>>以后一直点继续直到完成;



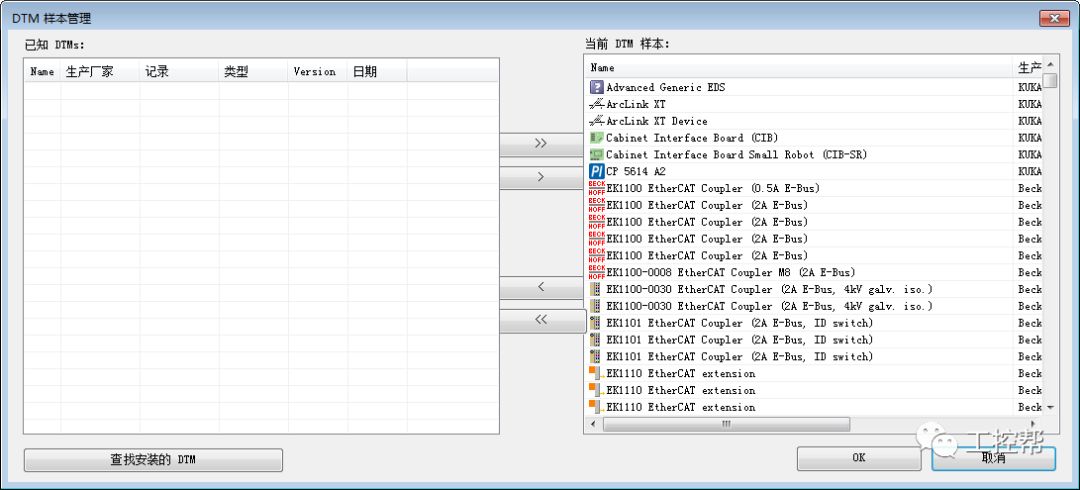
5、点击菜单栏 工具>>DTM样本管理>>查找安装的DTM>>全部添加到右侧一栏后,点击OK。

二:用WorkVisual下载库卡机器人项目
1、通过示教器查看当前库卡机器人IP地址,查看方法顺序:手动T1模式>>投入运行>>网络配置,例如其IP地址为 192.168.3.10;
2、将电脑的IP地址设置成与机器人统一网段,192.168.3.11;
3、将网线插到机器人控制柜内的KLI接口;
4、点击查找项目;
5、打开可用单元 所显示的项目,并右键激活控制器;

6、右键总线结构>>添加>>X44>>OK;
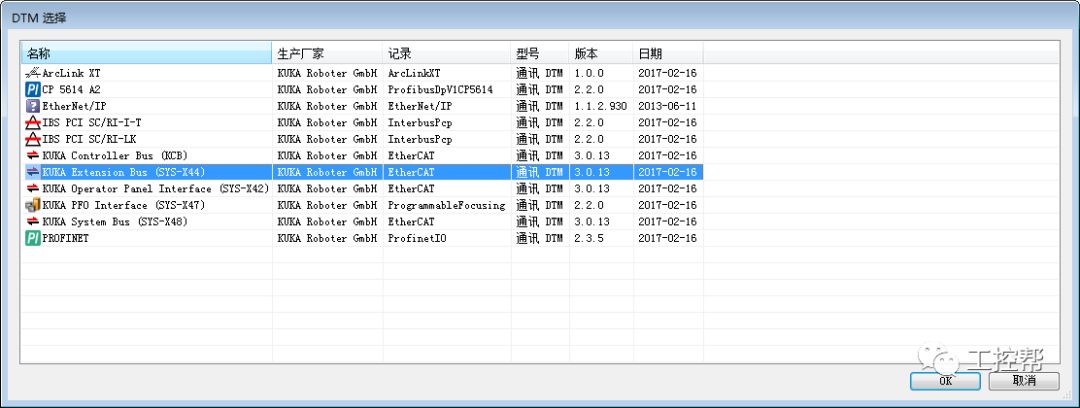
7、右键EtherCAT>>添加>>从DTM选择里找到你要添加的EK1100文件>>OK;
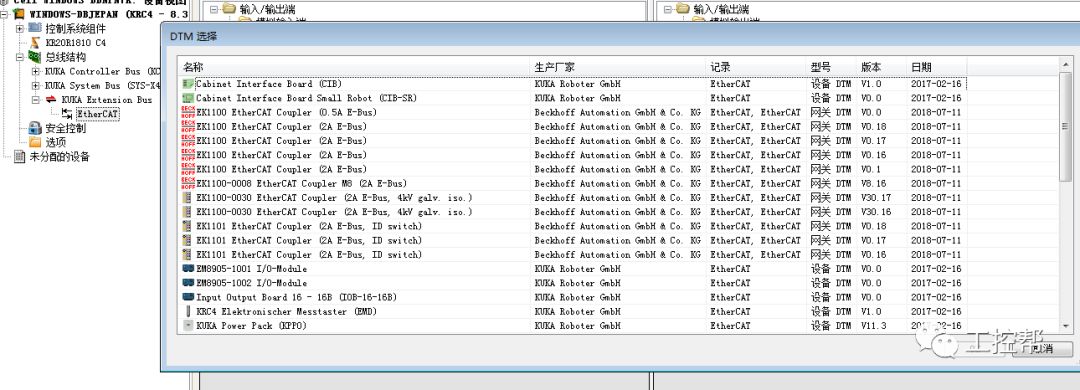
8、右键EBus>>添加>>从DTM选择里找到你要添加的EL6731(0010)文件>>OK;
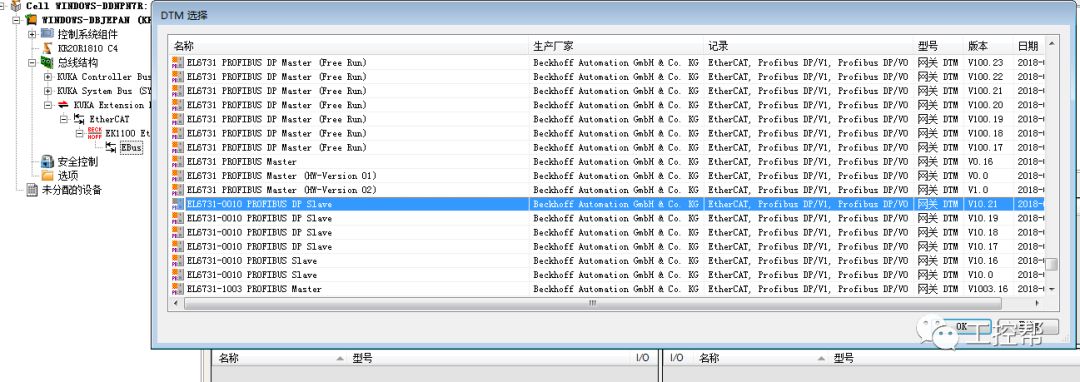
9、设置站号:双击EL6731-0010 >>Gateway settings>>设置站号(例:35)>>Apply>>OK;

10、右键ProfibusIO>>添加>>选择EL6731-0010 GSD文件>>OK;

11、右键EL6731-0010>>Module...>>从右侧一栏添加你需要的输入输出数量,并拖放到左侧>>Apply>>OK;

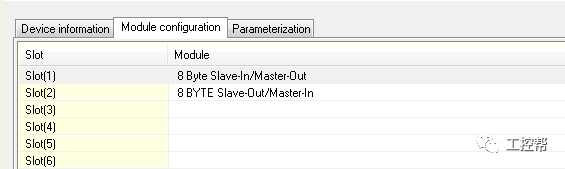
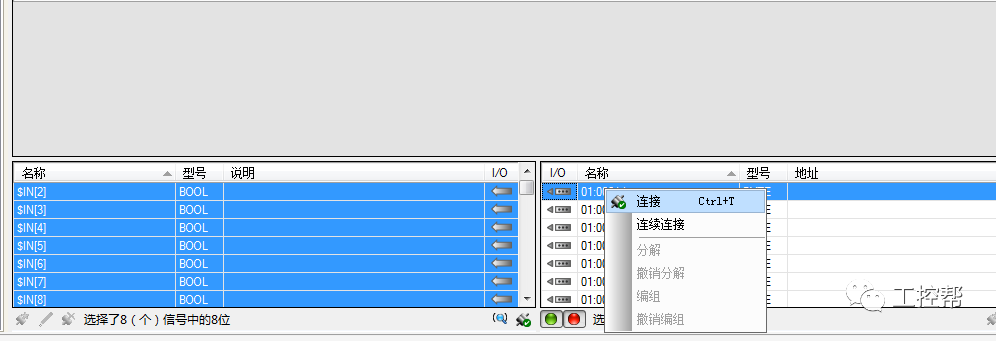
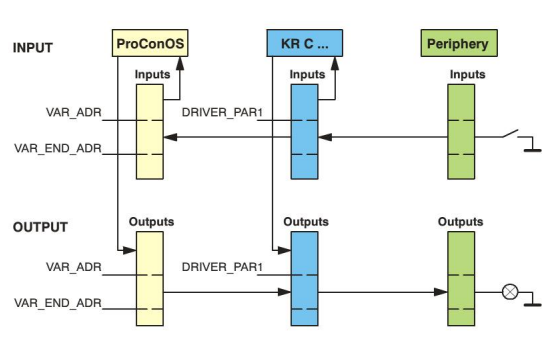
12、映射IO:输入输出接线>>左侧选择KR C输入、输出端,右侧选择EL6731-0010>>选择要映射的IO,右键>>连接,完成映射,配置完成。


-
通信
+关注
关注
18文章
6032浏览量
135995 -
PROFIBUS
+关注
关注
3文章
388浏览量
37846 -
工业机器人
+关注
关注
91文章
3363浏览量
92657
原文标题:库卡机器人如何用Work Visual4.0配置Profibus?大神来教你
文章出处:【微信号:GKB1508,微信公众号:工控帮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
酷卡机器人提示要求调零的目的是什么?
库卡KUKA机器人四种启动方式介绍
库卡机器人MGV电源模块维修
库卡机器人Profibus通信的步骤,一起来学习吧!

KUKA库卡机器人MGV电源模块维修PH1013-2840






 工商网监
工商网监
评论