 2018年DMV自动驾驶脱离报告出炉
2018年DMV自动驾驶脱离报告出炉
近日,加州机动车管理局(DMV,Department of Motor Vehicles) 公布了 2018年度的自动驾驶年度成绩单。共有48家公司提交报告,这些报告呈现了他们在 2017 年 12 月 1 日到 2018 年 11 月 30 日之间的自动驾驶路测成果。该报告的重点即为“脱离”(Disengagement)二字,本文也就“脱离”原因进行了分析。
美国加州是是全球第一个为自动驾驶车辆路测制定法规的地区,吸引了众多整车厂、供应商、及自动驾驶初创公司在此进行自动驾驶研发和路测。截止2019年2月13日,已经有62家公司持有加州有效的许可证。
从 2015 年起,对于自动驾驶测试,加州机动车管理局(DMV,Department of Motor Vehicles)要求获得自动驾驶路测资质的公司每年1月1日之前都要上交一份自动驾驶“年度报告”,总结测试过程中所经历的所有自动驾驶脱离Disengagement事件,这些“自动驾驶脱离报告”(下文简称“脱离报告”)。
该报告的重点即为“脱离”(Disengagement)二字,以此来衡量自动驾驶威廉希尔官方网站 的成熟度。
加州DMV对“脱离”Disengagement的应用场景作了两重定义:
1)被动脱离PDE (Passive Disengagement)
当自主驾驶相关威廉希尔官方网站 检测到故障无法继续执行时,自动驾驶模式被迫退出、断开控制,且要求驾驶员立即人工接管。
2)主动脱离 ADE (Active Disengagement)
自动驾驶控制系统未检测到任何故障,但驾驶员监控运行工况时为保证车辆安全行驶采取人工干预,主动触发自动驾驶模式的退出,实现对车辆的手动接管控制。
前者要求自动驾驶系统需要有完整的诊断机制,后者是对高阶自动驾驶车辆测试员的要求,即自动驾驶测试员需要根据自身的判断对车辆进行介入,手动控制车辆。
除此以外报告里面的要求评判维度有:
总的系统脱离报告
脱离时的环境和测试条件
当时的位置和环境(比如高速路、乡村道路和停车设施)
气候条件、道路环境的简要介绍
总的每台车的在公共道路条件下所行驶的里程
自动驾驶提示报警到驾驶员接管的时间间隔
在DMV公布的测试报告里,每家公司实际提供的信息都有差异,汇总这前家公司脱离报告中的关键数据如下表:
近日,DMV 公布了 2018年度的自动驾驶年度成绩单。共有48家公司提交报告,这些报告呈现了他们在 2017 年 12 月 1 日到 2018 年 11 月 30 日之间的自动驾驶路测成果。

这里汇总提供路测数据的25家公司脱离报告中的关键数据如下表:
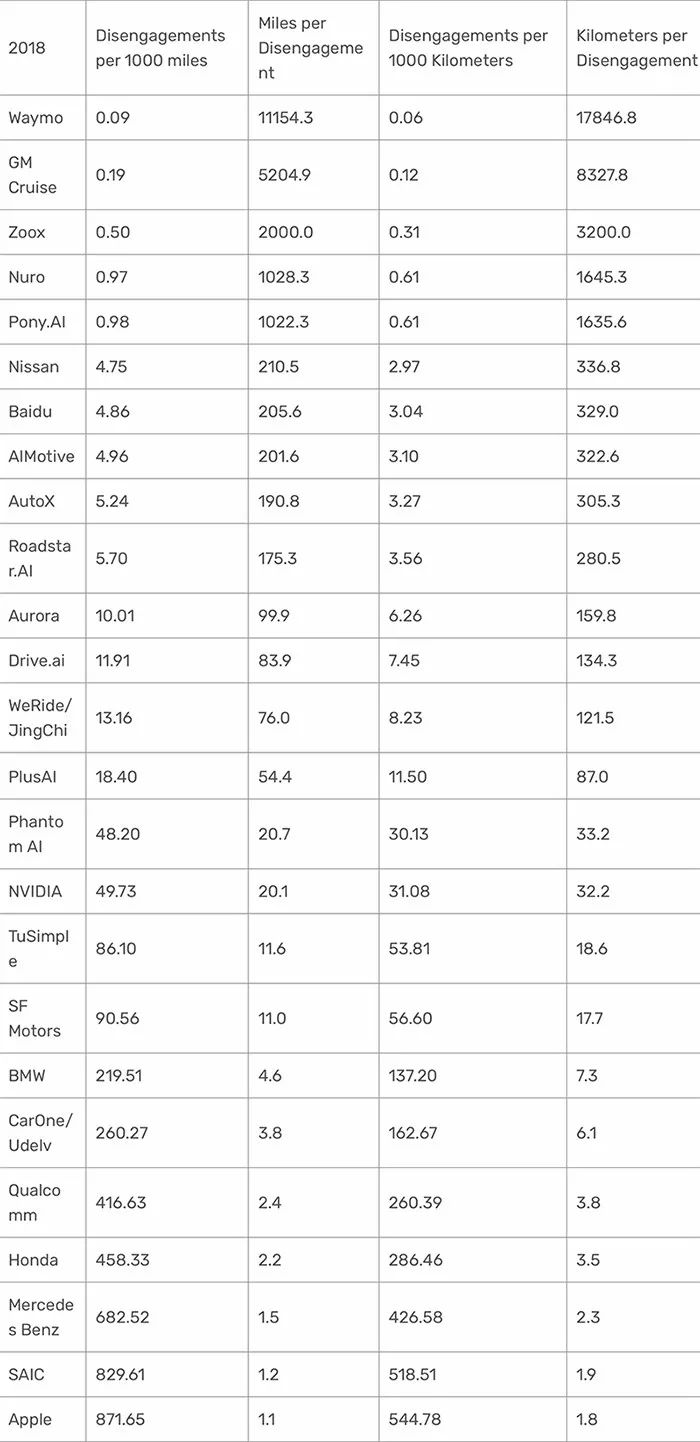
从图表的数据对比能够看出来,在加州的自动驾驶的路测方面,谷歌的MPI (Miles Per Intervention)仍然处于领先水平,不仅测试里程数达到1,271,587英里,而且“脱离”次数为114次,即每11154英里需要人工干预一次。
从图表中可以看出苹果公司的MPI很低,即每1000英里的脱离数量为871.65次,大约每1.1英里就有一次脱离。
当然,也有观点认为,这份报告并不能全面体现各家厂商的自动驾驶研究进展,脱离次数还受到很多其他方面的影响,并且有的公司并不只在加州这一个地方进行测试,评价一个公司的自动驾驶威廉希尔官方网站 高低的数据总量及数据维度并不全面。
很多厂商,例如通用,包括谷歌等,除了在加州境内测试,也在密歇根州、亚利桑那州和内华达州等等其他州或者国家进行自动驾驶路测。
其次,测试道路类型不同,对自动驾驶的难度要求也不同,像博世集团的测试道路就包括了城市道路、街道、乡村道路等复杂路况,而像通用、奔驰、日产的测试道路也基本集中在城市道路和街区道路等非标准道路。
最后,路测的数据来源也会不同,特斯拉在报告中指出,其虽然没有在加州进行大量道路测试,但是其在全球的仿真装置、实验室、测试车道和公路上进行了测试工作,目前已经收集了逾10亿英里Autopilot开启时的行车数据,这使得它掌握有大量实际路况中的行车数据。
但鉴于自动驾驶相关测试指标的多样性,路况的复杂性,加州的年度报告可能不能全面覆盖,但是加州作为批复路测资质最多的城市,其提供的数据样本在目前所有允许自动驾驶测试的地区当中还是最为完整的。
仅就加州的脱离次数报告,既然这里脱离是这份报告的重点,那么下面我们我们讨论一下自动驾驶功能脱离的原因,希望能给大家启发。
自动驾驶功能脱离的主要原因分析
环境因素对自动驾驶车辆运行至关重要。在不同环境条件下(包括不同的地点、天气、路面类型等因素)实现全自主驾驶,要求自动驾驶威廉希尔官方网站 足够的智能与鲁棒,以处理所有可能遇到的运行工况。脱离报告中所涉及的道路环境状况综述如下:
1)地点:街道、州际公路、高速公路、乡村道路、停车场。
2)天气:晴朗、多云、雨天、晴朗夜晚 。
3)路面状况:干燥、潮湿、有洞或凸起等不佳状况路面,车道线不清晰,路面交通标记褪色不清,以及新铺路面。
诸多因素会影响自动驾驶控制,并导致功能退出。这些原因包括(但不限于)如下。
不同类型自动驾驶退出的诱因
被动退出 PDE的典型原因
1)硬件问题
硬件元器件失效或未按预期执行工作,一些典型的报告原因如下:车辆控制器发生故障;传感器、导线、执行机构和其他物理设备损坏。
2)软件问题
软件故障涵盖了环境感知、物体识别、车辆定位、决策、路径规划、轨迹生成、纵横向控制等诸多方面的问题。报告的一些典型原因包括:错误识别了障碍障碍物;另一辆车从侧面接近但未被感知;识别系统失去了前车轨迹;目标路径生成失败;定位故障等等。
3) 天气条件
测试过程中出现的天气条件因素导致自动驾驶功能退出,典型原因例如:照明条件差导致交通信号灯检测故障;阳光过强导致对象检测失败;雨、雪、雾等导致能见度差;过热或过冷的温度,等等。
4) 路面条件
由于路面状况不佳,导致自动驾驶功能关闭,典型原因例如:道路有洞或凸起;褪色的路面标记、刚铺好的路面,等等。
主动退出ADE的典型原因
主动退出的典型原因包括软件限制、硬件问题、遇有紧急情况和预防性人工干预等。详细描述和相关的示例案例如下。
1)软件的局限性
虽然自动驾驶系统没有检测到故障,但由于其自身能力限制无法处理复杂情况下的高级驾驶任务,或由于软件的限制而导致的物体感知、车辆的轨迹、行为等不理想,使得人工主动介入干预,导致自动驾驶功能退出。一些典型的案例如:在拥挤交通环境下换道;十字路口过多行人和车辆使得自主系统难以决策控制;自动驾驶车辆过于靠近停着其他车辆;未识别停止的前车,未能有效减速,于是司机主动接管,采取制动操作,等等。
2)硬件问题
硬件故障使得司机感到需要立即人工干预控制车辆。
3)紧急情况
紧急情况下,驾驶员出于安全性的考量主动接管车辆的控制权限。典型案例包括:出现急救车辆(为了解决此问题,谷歌提出了一个检测和应对紧急车辆的方法);道路出现交通事故,等等。
4)预防性干预
为了避免由于路面状况不佳等原因导致自动驾驶功能退出,驾驶员采取的预防性人工干预措施,例如:避开前方施工区域;避让自行车骑行者,为其提供足够空间;为保障行人安全而采取的预防性措施;确保车辆在恶劣天气条件下的安全行驶。
-
自动驾驶
+关注
关注
784文章
13804浏览量
166426
原文标题:2018年DMV自动驾驶脱离报告出炉,只看排名?不看脱离原因怎么行?
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
美股今年自动驾驶最大IPO诞生!
自动驾驶汽车安全吗?


自动驾驶威廉希尔官方网站 的典型应用 自动驾驶威廉希尔官方网站 涉及到哪些威廉希尔官方网站



苹果自动驾驶汽车项目终止
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
特斯拉在华推进全自动驾驶
华为小米自动驾驶Occupancy Network对决






 工商网监
工商网监
评论