 步进和闭环步进及交流伺服电机产品的特点及对比
步进和闭环步进及交流伺服电机产品的特点及对比
本文将介绍步进、闭环步进、交流伺服产品的特点及对比,帮助工程师选择最适合自动化设备应用要求的产品。
1、步进、闭环、交流伺服产品对比
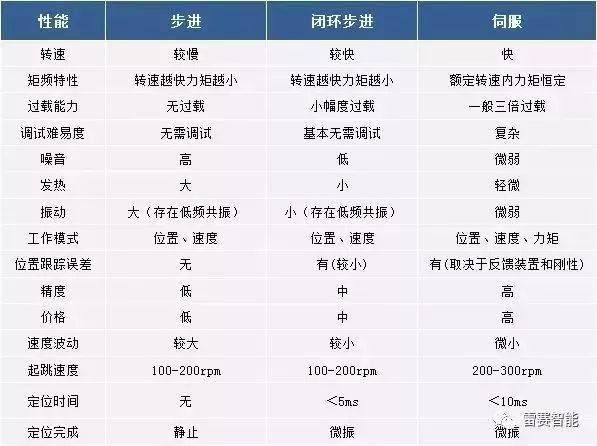
表一:步进、闭环、伺服产品性能对比表
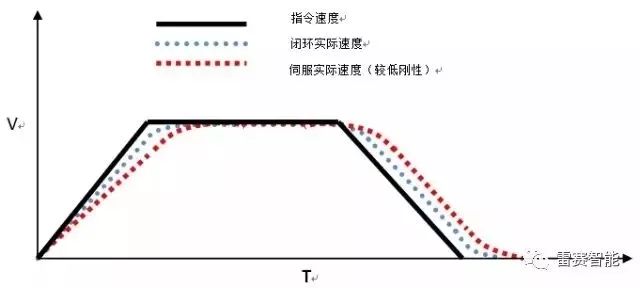
图一:闭环步进和伺服位置跟踪误差示意图
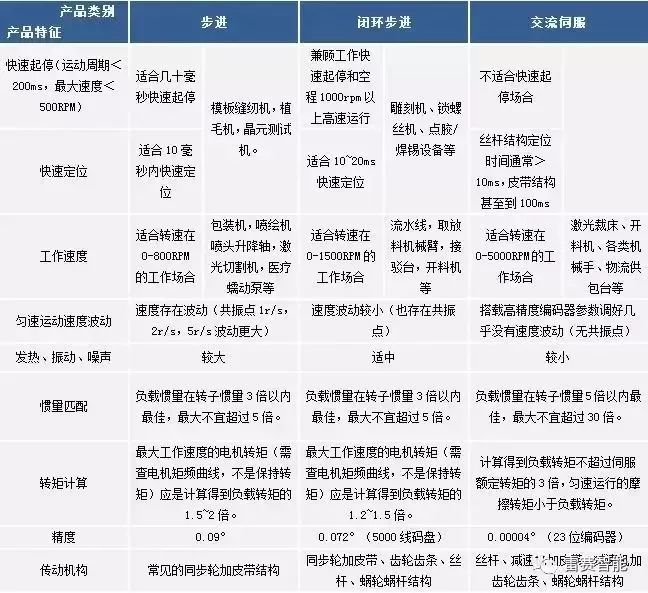
表二:步进、闭环步进、伺服选型实例一览表
2、步进电机
步进电机是一种将数字脉冲信号转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度即步距角。
图二:雷赛CM系列步进电机
2.1 步进电机参数介绍
保持转矩:步进电机绕组通额定电流但没有转动时,定子锁住转子的力矩,一般在转速小于1r/s时步进电机输出力矩近似于保持转矩。
矩频曲线:描述电机转矩和转速关系的曲线。

图三:雷赛相同转矩57机座开环步进和闭环电机转矩对比
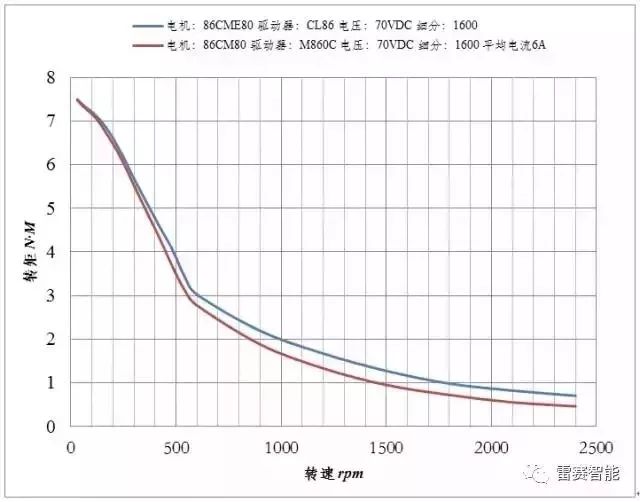
图四:相同转矩86机座开环步进和闭环电机转矩对比
备注:步进电机电压平衡方程式:U=E+IR,供电电压U,电机反电动势E,绕组电流I,绕组电阻R。电机转速越高反电动势越大,能流入电机绕组的电流越小,导致电机力矩越小。
转子惯量:步进电机转子旋转惯量,负载惯量最大不宜超过电机转子惯量5倍。
步距角:整步下一个脉冲信号步进电机转过的角度。一般两相混合式步进电机步距角是1.8°,三相混合步进电机步距角是1.2°,五相混合步进电机步距角是0.72°。
2.2 步进电机结构
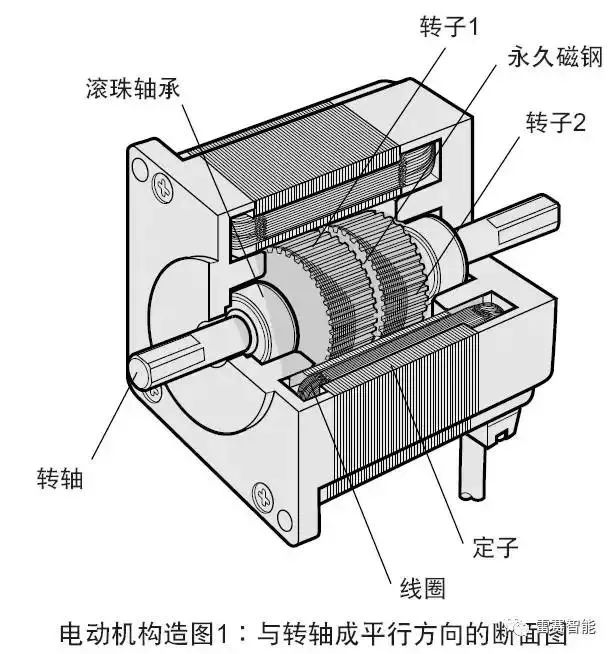
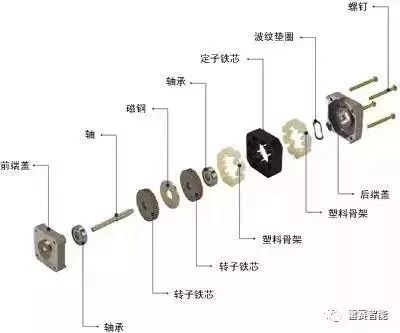
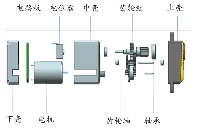
图五:步进电机内部结构
2.3步进电机接线方式
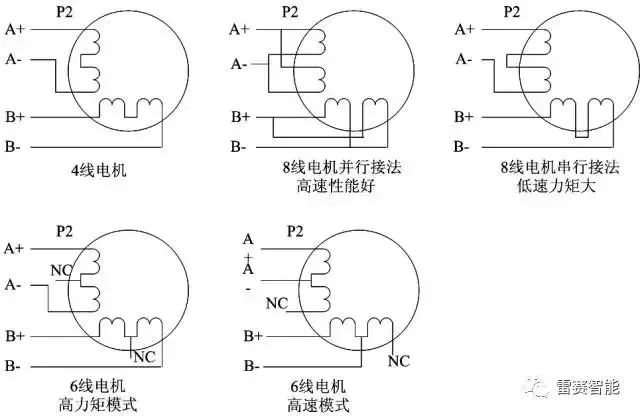
图六:步进电机接线方式
a) 四线电机:输出电流设成等于或略小于电机额定电流值;
b) 六线电机高力矩模式:输出电流设成电机单极性接法额定电流的50%;
c) 六线电机高速模式:输出电流设成电机单极性接法额定电流的100% ;
d) 八线电机并联接法:输出电流可设成电机单极性接法额定电流的140% ;
e) 八线电机串联接法:输出电流可设成电机单极性接法额定电流的70%。
2.4步进电机特点
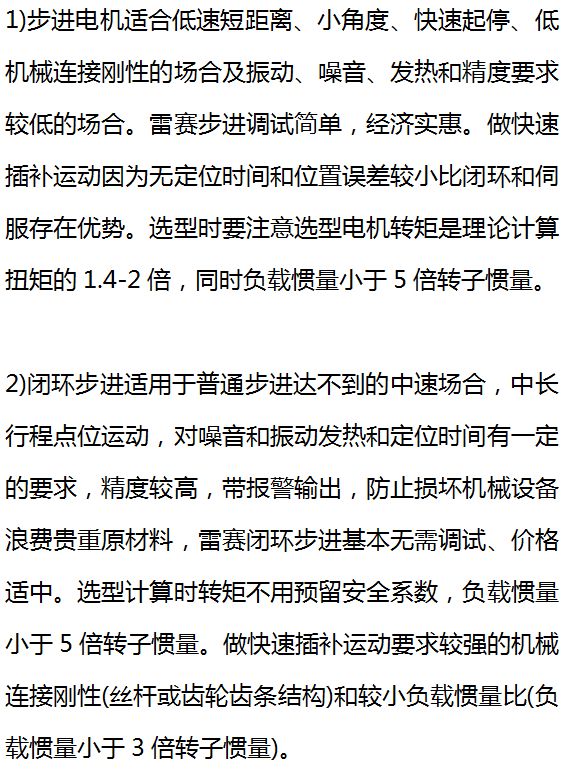
低速力矩大,转矩会随着转速的提高而降低,一般在800rpm以上力矩下降加快,精度是步距角的3%~5%,整圈没有累积误差,两相混合步进电机精度为0.18°;步进电机采用开环控制,系统响应性快,无过冲和整定时间,停止时电机轴无微振动。步进电机存在低频共振,第一个共振点的转速大约是1r/s。步进电机是恒电流控制,发热和噪音较大,同时没有过载能力,电机力不够就会堵转,故选型时应预留1.4-2倍安全系数。步进电机及驱动器使用便捷无需复杂的调试就能使用。
3、闭环步进
本体是步进电机,增加位置反馈器件(光电编码器或磁编码器),运用类似伺服电机的控制方法形成的闭环控制系统。
图七:雷赛CL系列闭环步进的3D和实物图
3.1闭环步进重要参数
编码器精度:电机转一圈编码器反馈到驱动器的脉冲个数,影响闭环步进精度。闭环步进常规编码器线数有1000线、2500线、5000线。以5000线为例,它的分辨率为360°/(4*5000)=0.018° ,精度高于开环控制的步进电机。
矩频曲线:描述电机转矩和转速关系的曲线。
位置误差:指令位置和编码器反馈位置之间的差值。位置误差过大驱动器会报超差报警。
3.2闭环步进原理框图
图八:闭环步进原理框图
3.3 闭环步进的特点
闭环步进根据负载大小自动调节绕组电流大小,发热和振动小于开环步进,有编码器反馈所以精度高于普通步进电机,电机响应比开环步进慢,运行过程中存在位置误差,误差会在指令停止后数毫秒逐渐降低。高速力矩比开环步进大,常见应用在0-1500rpm场合。做插补机械刚性不足(皮带结构)且负载惯量较大时,会因为位置跟踪误差大导致偏位。小部分闭环步进需要简单的调试才能使用。
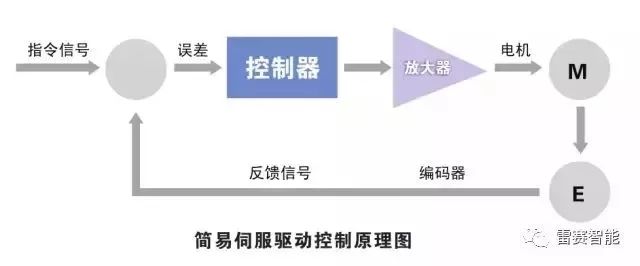
4、交流伺服
伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。位置模式下伺服电机靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度。同时伺服电机编码器具备反馈功能,伺服电机每旋转一个角度,编码器都会发出对应数量的反馈脉冲,反馈脉冲和伺服驱动器接收的脉冲形成闭环控制,这样伺服驱动器就能够很精确的控制电机的转动,从而实现精确的定位。
图九:雷赛L5系列交流伺服产品实物图
4.1伺服电机重要参数
额定转速:电动机输出最大连续转矩(额定转矩)、以额定功率运行时的转速。
额定转矩:是指电机能够连续安全输出的转矩大小,在环境温度为25 °C时,在该转矩下连续运行,电动机绕组温度和驱动器功率器件温度不会超过最高允许温度,电动机或驱动器不会损坏。
最大转矩:电动机所能输出的最大转矩。在最大转矩下短时工作不会引起电机损坏或性能不可恢复。
最大电流:伺服短时间工作允许通过的最大电流,一般为额定电流的3倍。
最高转速:电机短时间工作的最高转速,最高转速电机力矩下降,电机发热量更大。
转子惯量J:伺服电机转子旋转惯量单位kgcm^2,一般负载惯量最大不超过20倍电机转子惯量。
编码器线数:电机转一圈编码器反馈到驱动器的脉冲个数,影响闭环步进精度。伺服常规编码器线数有2500线、5000线、17位和23位编码器。17位编码器精度为0.0027°高于常规的步进和闭环步进。
伺服电机两个重要公式:T=Kt*I,P=n(单位换算成弧度/秒)*T。
4.2 伺服电机结构
图十:伺服电机内部结构
4.3 伺服三环控制原理框图
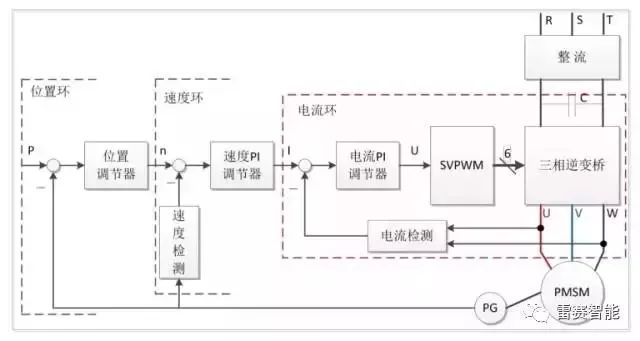
图十一:伺服三环控制原理框图
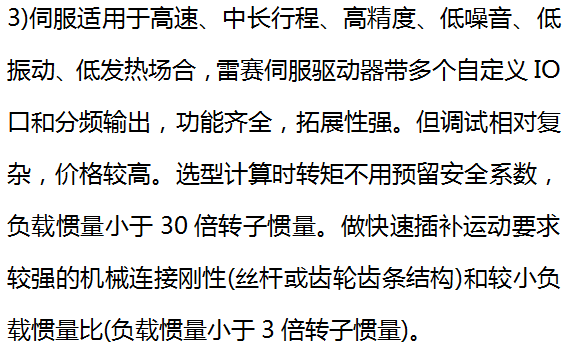
4.4伺服电机的特点
交流伺服具备额定转速下力矩恒定的特点,常见200W,400W低中惯量交流伺服额定转速为3000rpm,最高转速5000rpm,转速高。力矩与电流成正比,可以工作在力矩模式,例如锁螺丝,压端子等需要恒定力矩的场合。
交流伺服工作噪音振动极小,发热低。同体积下电机惯量转子惯量小,400W伺服惯量仅相当于57基座2NM步进电机的转子惯量。
伺服具备短时间过载能力,选型时需考虑加减速时电机过载倍数。
伺服采用闭环控制,同闭环步进一样存在位置跟踪误差,雷赛伺服具备轨迹跟踪和共振抑制功能以提高伺服刚性来降低位置误差,和定位时间,以达到更好的插补效果。伺服需要调试才能使用。
5、三种电机驱动方案对比总结
-
编码器
+关注
关注
45文章
3639浏览量
134444 -
步进电机
+关注
关注
150文章
3109浏览量
147451 -
伺服电机
+关注
关注
85文章
2046浏览量
57829
原文标题:电机驱动方案对比:步进、闭环、交流伺服
文章出处:【微信号:wwygzxcpj,微信公众号:电机威廉希尔官方网站 及应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论