 工厂行车遥控装置的制作
工厂行车遥控装置的制作
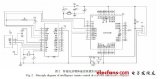
工厂车间常用的小型行车,装在工字梁上。由电动机经减速机构带动钢丝绳,牵引吊钩上下起吊重物。在电机行走的牵引下,可左右前后移动。
行车控制方法是由装在行车上的电控箱中引出一根多芯电缆,再接一操作按钮盒,通过六个按钮或八个按钮控制提升、下降、前后和左右行走或电源的开、关。
当行车移动时,操作者要手持按钮盒,眼盯着重物,跟着行车走动,很不方便。笔者利用安装有BA5104/5204组件的遥控装置,可有效解决这一问题。本文是针对5t行车而制作的。
电路工作原理
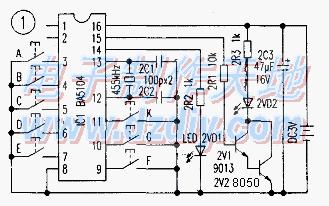
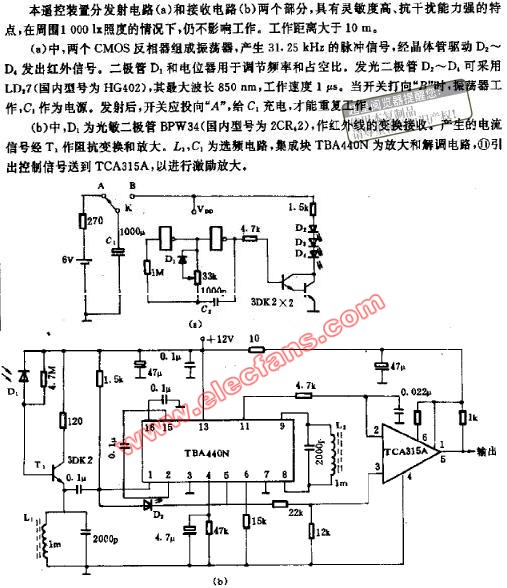
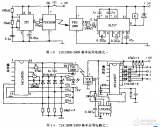
它由发射和接收两部分电路组成,发射电路(如图1)采用BA5104(ICl)专用编码率型的LN70系列,‘VD2选用与之工作波长接近的PN303型光敏二极管。VDl与VD2应装置在钻有两孔的黑塑料块中。也可以用两段小金属管平行粘接在一起,然后在管中各放入一个光敏元件,如图5示意。
电路本身的调试工作量很小,在装好后,一般只要进行灵敏度调节。开始不要将红外线发射和接收管装置在一起。装好电路后将VD1、VD2拉开2米左右的距离,将RP2调至最小。调节RPl使IClIC。ICl的①、②脚为客户码选择端,此两端要求和接收电路的BA5204(IC2)解码IC的(11)、(12)脚对应悬空或接地。
ICl的(12)、(13)脚外接455kHz的陶瓷晶振,③一⑦脚、⑨~⑩脚接8个控制按键,按某~键,可使IC2相应脚电平发生变化。对应关系见附表。
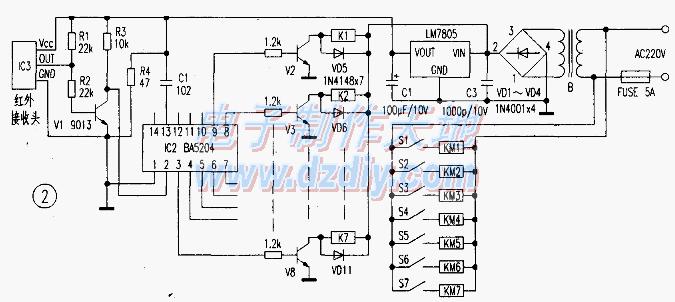
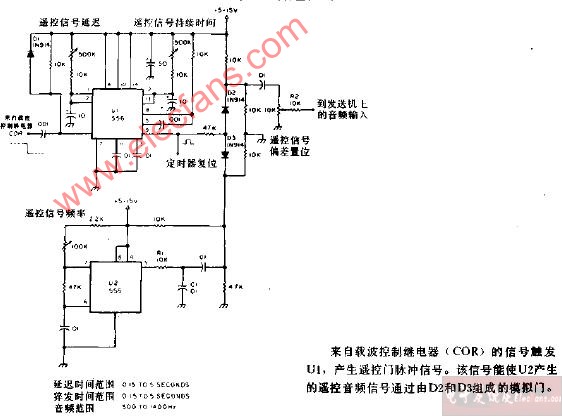
(14)脚为发射指示端。编码信号从(15)脚输出,经2V1和2V2组成的复合管放大后由2VD2红外发射管变成光信号发射出去。遥控接收电路原理如图2所示,IC2的工作电压为5V。
(13)脚为内部振荡器定时端,外接R4和C1网络;③一⑩脚为控制输出端。其③一⑧脚的6个端口为非保持端,在这里③、④脚为提升、下降信号端,(5)、⑥脚为前后行走信号端。⑦、⑧脚为左右行走信号端,⑨脚为开/停车保持端,设前后和左右行走电机电源接通端,分别控制相应的常开触头,实现电 源通断控制。
IC3电路的红外接收头(三端),它接收放大和解调信号,把遥控器发出的红外信号还原成解码BA5204能识别的脉冲码。BA5204的(3)~⑨脚输出的信号分别经三极管V2~V8放大,驱动相应的继电器,实现控制功能。
红外线控制集成电路BA5.104,3V供电,2V1选用9013,2V2选用80500红外线控制集成电路BA5204,5V供电。
Vl~V8选用9013,整流二极管VDl~VD4选用1N4001,VD5一VDl2选用lN4148。电源变压器B选用XDT型交流220V信号灯变压器。
继电器K1~K7选用超小型中功率电磁继电器JZC-ZZF型,吸合电压12V。KMl~KM7需根据实际情况选定。
电动机的电器控制部分是原有的,不拆掉原有的按钮盒和电缆,即可实现手动和遥控两用。本电路在5t行车上进行应用,效果很好。若行车的起重量大,应增加中间继电器。
-
遥控装置
+关注
关注
0文章
7浏览量
7515
发布评论请先 登录
相关推荐
基于电脑串口遥控装置设计
无线比例电机遥控器的制作相关资料分享
怎么实现基于射频识别威廉希尔官方网站 的汽车防盗装置的设计?
红外线遥控装置的多元应用
简单实用的鼠标遥控装置

电脑鼠标口的遥控装置设计与制作(含电路图)
哪一类电池可用于遥控装置?
基于单片机的智能化多媒体电脑遥控装置的设计
无线电遥控模块、组件及其基本应用电路的解析





 工商网监
工商网监
评论