 通过MC_GearIn功能模块实现电子齿轮同步
通过MC_GearIn功能模块实现电子齿轮同步
本文主要介绍SM3_Basic库中的速度同步功能块MC_GearIn,用于实现从轴与主轴以一定的速度比同步运行。
硬件组态
程序
可通过MC_GearIn功能块实现两轴速度同步
进入电子凸轮过程
第一步:主从轴使能
第二步:触发同步功能块
Master:主轴
Slave:从轴
Execute:上升沿触发,如果修改齿轮比需要再次触发
RatioNumerator:电子齿轮比分子
RatioDenominator:电子齿轮比分母
Acc:进入电子齿轮模式的加速度
Dec:进入电子齿轮模式的减速度
Jerk:进入电子齿轮模式的加加速度
加减速管脚的单位均为用户单位
从轴速度=(分子/分母) * 主轴速度
分子可以为负数,表示从轴反向与主轴同步运行
电子齿轮只能保证速度同步,不能保持位置同步,如果需要实现位置同步,请使用电子凸轮
第三步:运行主轴速度功能块
正常情况下从轴会立即跟随主轴运转,可通过下面功能块读取从轴速度
退出电子齿轮过程
同步过程中如果直接触发Gearout可能会出现不能正常停机的现象,建议先停主轴,然后再Gearout
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
模块
+关注
关注
7文章
2696浏览量
47438 -
同步
+关注
关注
0文章
89浏览量
19167 -
触发
+关注
关注
1文章
87浏览量
22621
原文标题:LMC078通过SercosIII总线控制LXM32S实现电子齿轮
文章出处:【微信号:SE_AUT,微信公众号:自动化小天地】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
SIMULINK功能模块的处理
,对模块出现的4个黑色标记进行拖曳即可。模块命名:先用鼠标在需要更改的名称上单击一下,然后直接更改即可。名称在功能模块上的位置也可以变换180度,可以用Format菜单中的Flip Name来
发表于 07-13 14:19
瑞萨节能的“功能模块”解决方案
还可以通过参加瑞萨安排的器件应用和电力电子威廉希尔官方网站
电路设计、MCU控制程序开发等各类研讨会,设计出更高水准的电路。瑞萨提供的“功能模块”可以说是克服电力电子威廉希尔官方网站
系统开发课题的“答案”吧。电
发表于 12-06 16:15
求助:功能模块和计数器间连接电路的实现
功能目的:功能模块不可循环,为达到功能模块自动循环10次(次数可调,最高16次)后功能模块输出有用信号,故增加计数器辅助循环达到目的。 功能模块
发表于 03-05 14:51
NK-980IoT评测EMAC功能模块(二)
1、EMAC功能模块的使用说明默认工程的rtconfig.h配置网络使用流程如下netdev.h组件用于网卡管理,定义了网卡 struct netdev及操作函数2、EMAC功能模块之
发表于 04-08 14:49
SIMULINK功能模块的处理
SIMULINK功能模块的处理功能模块的基本操作,包括模块的移动、复制、删除、转向、改变大小、模块命名、颜色设定、参数设定、属性设定、模块输
发表于 06-19 12:50
•2520次阅读
SIMULINK线的处理/SIMULINK自定义功能模块
SIMULINK线的处理/SIMULINK自定义功能模块 SIMULINK模型的构建是通过用线将各种功能模块进行连接而构成的。用鼠标可以在功能模
发表于 06-19 12:51
•5313次阅读
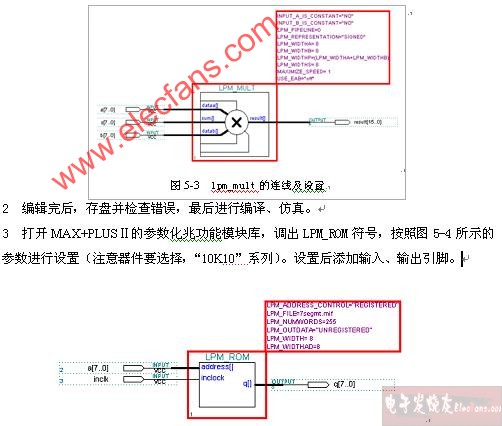
MAX+PLUSⅡ的参数化兆功能模块库的使用
实验五、MAX+PLUSⅡ的参数化兆功能模块库的使用一 实验目的1进一步掌握MAX+PLUSⅡ参数化兆功能模块库的使用。2了解参数化兆功能模块库LP
发表于 03-13 19:23
•1624次阅读
PDA功能模块的设计
PDA功能模块的设计
Springboard扩展槽可集成在Visor与Visor Deluxe手持式电脑中,从一开始就为手持式电脑设计了真正的即插即用硬件扩展功能。由于独特的
发表于 03-03 19:43
•1263次阅读
maxim医疗电子产品_助听器功能模块电路图
maxim医疗电子产品_助听器功能模块电路图如下图所示: 图 maxim医疗电子产品_助听器功能模块电路图
发表于 10-08 15:12
•2706次阅读


QuartusⅡ中宏功能模块的使用
QuartusⅡ软件针对常用的功能,提供了参数化(Parameterized)的宏功能(megafunctions)模块,通过调用宏功能模块
发表于 04-03 15:34
•12次下载
关于电子标签的基本功能模块浅析
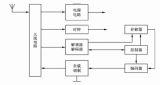
发射信号的处理; 天线是电子标签发射和接收无线信号的装置。电子标签芯片电路的复杂度与标签所具有的功能相关,一般包括电源电路、时钟电路、解调器、编解码器、控制器、存储器和负载调制电路等功能模块
发表于 12-07 09:29
•5955次阅读






 工商网监
工商网监
评论