 将神经网络和模糊控制威廉希尔官方网站
相结合实现温室控制系统设计
将神经网络和模糊控制威廉希尔官方网站
相结合实现温室控制系统设计
引言
温室综合环境控制就是对如温度、湿度、光照强度等环境因子进行综合调节和控制。通过合理地控制温室中的各个执行机构,使作物和环境因子达到最佳的统一,这是温室控制的目标。温室系统是一个非线性、大滞后、大惯性、强耦合、时变的复杂大系统,它要受到多变的外部环境、受控对象的不确定性、作物形态、尺寸不断变化的影响.针对模糊控制和神经网络控制的优缺点,本文将模糊理论的知识表达与神经网络的自学习能力有机地结合起来,采用快速的学习算法,提出了一种模糊神经网络控制方案。
1 温室模糊神经网络控制器结构的确定
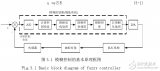
对温室内作物影响最大的环境因子为温度和湿度。因此,在本文设计的温室模糊控制器中,输入量选择两个,分别是温度误差、湿度误差,输出量有六个,分别是天窗、遮阳网、循环风机、侧窗、燃油加热器、微雾加湿器。图1 为温室智能控制基本结构图。
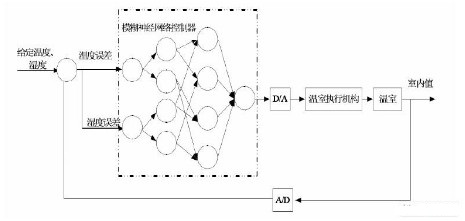
图1 温室智能控制基本结构图
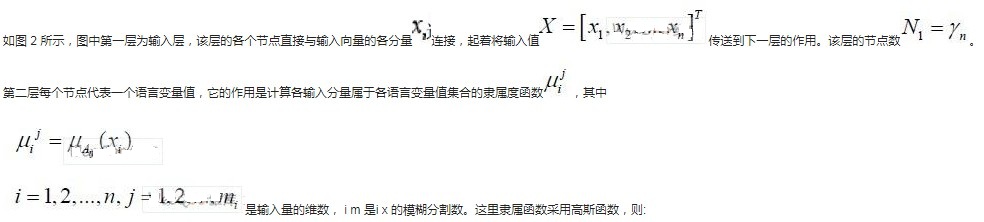
其拓扑结构如图 2 所示:
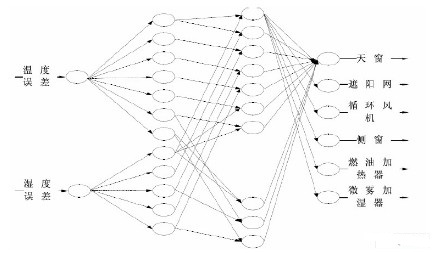
图2 模糊神经网络控制器拓扑结构
2.模糊推理规则的制定
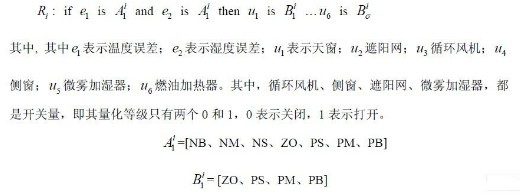
将模糊神经网络控制器的模型描述为:
训练初始参数设置如下,各变量的论域分别为:

式中m 为隶属函数的中心值,σ为隶属函数的宽度。m 和σ的初始参数值可以凭经验给出,若没有可靠的经验,则初始参数值可按如下规则设定:将隶属度函数的中心取为均匀分布在定义域内,隶属度函数的宽度则可取为同一值,使得相邻隶属函数交点的隶属度值等于0.5。对于温度误差 m 取值为-6、-4、-2、0、2、4、6,σ取值为1.2。湿度误差m 取值为-4、-2、0、2、4,σ取值为1.2。天窗,燃油加热器的m 取值为0、2、4、6,σ取值为1.2。而对于循环风机,侧窗,遮阳网和微雾加湿器,其值为开关量0 和1。模糊控制器控制规则的设计原则是使系统输出相应的动态性能与稳态性能达到最佳。即当误差较大时,选择控制量以尽快消除误差为主,而误差较小时,选择控制量以防止超调,主要考虑系统的稳定性。
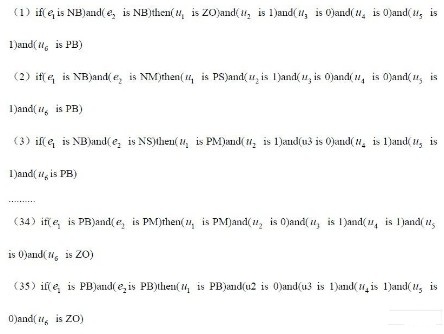
根据专家经验,将控制过程中各种可能出现的情况及相应的控制策略进行分析汇总,可得到35 条控制规则,用“IF-THEN”形式的条件语句来加以描述,部分条件语句如下:
3.温室模糊神经网络控制器的学习算法

4. 模糊神经网络控制器仿真与结果分析
根据上述设计思路,对系统进行仿真研究。其中输入输出训练集的一一对应关系是基于上述模糊规则给出,模糊控制与神经网络得以有效的结合。
图3 为系统在MATLAB 中的仿真曲线,在经345 次训练后,误差可达到0.000745347,小于期望误差的最小值0.001。仿真实验结果表明,模糊神经网络控制器在温室系统中的应用具有良好的效果。温室控制系统仿真结果如图4 所示。
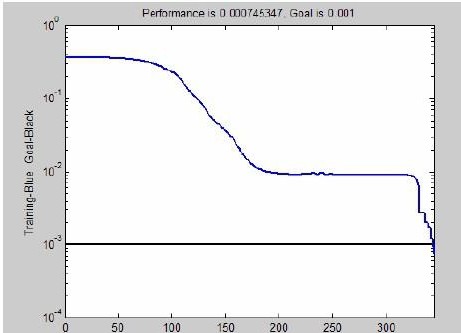
图 3 神经网络训练的误差曲线图
图 4 模糊神经网络控制系统温度仿真曲线
模糊神经网络控制则超调量小,响应快,无振荡,平稳性好,而且稳态误差很小。这说明模糊神经网络控制的动态特性和静态特性最为优越。从能量损耗角度来讲,由于模糊神经网络的响应时间快,调节时间短,超调量小,这时对加温的调节更接近于实际室内所需负荷的要求,这样就可以更好的达到满足作物生长所需的温度及节能的效果。
5.小结
综上所述,为了获得满意的控制系统性能,将神经网络和模糊控制威廉希尔官方网站 相结合,引入模糊神经网络控制方法,系统通过网络学习训练使控制精度大为提高,使系统有了较强的适应性和鲁棒性,获得比较理想的控制效果,提高控制方面的优越性,也为实际控制提供了理论依据;该控制器模型的设计方法和实现威廉希尔官方网站 主要是从工程应用的角度出发进行的,具有实践性和可操作性,仿真研究及实验结果验证了设计的合理性与可行性,该控制器模型具有较高的应用价值。
-
控制系统
+关注
关注
41文章
6605浏览量
110582 -
神经网络
+关注
关注
42文章
4771浏览量
100724 -
模糊控制
+关注
关注
2文章
261浏览量
25502
发布评论请先 登录
相关推荐

基于神经网络的库存控制系统
自适应模糊神经网络的交通灯控制系统的设计





 工商网监
工商网监
评论