 如何实现步进电机中的速度调节控制设计
如何实现步进电机中的速度调节控制设计
引言
对步进电机的控制是经济型数控系统开发时的一项重要内容,其中对步进电机运动过程中的升 降速控制是重点。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机威廉希尔官方网站 的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
1 步进电机动态特性分析
由于步进电机的输出转矩随步进频率的增加而减少,根据步进电机的动态特性,可以通过其动 力模型(二阶微分)描述: 式中:J—系统的总转动惯量 θ—转子的转角 β—阻尼系数 k—与θ成某种函数关系的比例因子 Tz—摩擦阻力矩及其它与β无关的阻力矩之和 Td—步进电机所产生的电磁驱动转矩 式中, —惯性扭矩 —角加速度 显然,惯性扭矩 应小于最大电磁转矩Td,在升速阶段角加速度 越大越好,使得到达匀 速的时间越短,但在加速阶段为了减小对系统的冲击 不应该突变,故在不失步的前提之下,在加速阶段 应正比于频率f对时间的微分。故 可以表示为: 式中:A和B是两个特定的时间常数。 假设在升速阶段的启动频率为 ,则对(3)式进行拉氏变换得: 对(4)式整理得: 再次对(5)式进行拉氏反变换整理得: 式(6)中, 为时间常数,反映上升速度的快慢,式(7)中,。设步进电 机在升速过程中启动频率为,运行最高频率为,当运行足够的时间后(用表示),有 ,根据式(7)得: 由(8)式整理,并且由于远大于,故: 将(9)式代入(7)式中得: 式(10)中 为时间常数,该式就是普通的指数加减速的数学模型。
2 步进电机的升降速曲线
由步进电机动态特性的理论推导可知,指数规律的升降速曲线更能使步进电机转子的角加速度 的变化与其输出转矩的变化相适应,指数曲线能更充分反应步进电机速度特性。因此用指数曲线来 分析步进电机加减速。由指数曲线方程绘制出电机升降速曲线如下图1所示: 如图1所示,纵坐标为频率,单位是步/秒,其实反映了转速的高低。横坐标为时间,各段时间内走 过的步数用N来表示,步数其实反映了行程。图中标出理想升速曲线和实际升速曲线。
3 升速过程的离散处理
由升速算法,在程序运行时,若运行速度为,则可计算出升速时 间为: 由于计算机上无法实现连续控制,必须将上升时间离散化。若将升速段均匀分为n段,由(11) 式可知上升的时间为,则相邻两次速度变化的时间间隔为。 式中:n为阶梯的分档数。则每一档的频率为 由上式可计算出定时器的时间设定值,即各频率段上脉冲个数(或运行的步数)Ni为 则升速的总步数为: 程序执行过程中,对每档速度都要计算在这个台阶应走的步数,然后以递减方式检查。当减至 零时,表示该档速度应走的步数已走完,转入下一档速度,与此同时,还要递减升速过程总步数,直到升速过程走完为止。以上就是对升速过程的处理,降速过程的处理方法和升速过程相同。 本文所选的步进电机为42BYG4501型两相混合式步进电机,该电机的最大空载启动频率为 1200步/s, 允许突跳频率可由电机的最大空载启动频率求得,一般取其1/2~3.结合本系统对升降速的具体要求。
4 用单片机实现步进电机的速度控制
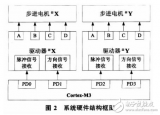
本文采用C8051F040单片机对步进电机进行升降速控制,单片机使用定时器中断方式来控制步 进电机的速度,升降速控制实际上是不断改变定时器初载值的大小。为了少占用CPU资源并提高响 应速度,设计时把各离散点速度所需的定时器装载值固化在单片机的ROM中,系统运行时用查表法 查出所需的装载值。升速控制中,需要查各台阶微步数和对应的时间常数表。减速控制中,无需任 何调整,等分时间取和加速段相同值。最后一档速度为加速段的启动速度。 系统进入加减速运行方式后,首先依据设定的工作速度,计算加减速过程所需的台阶数和定时 器时间常数以及匀速段定时器时间常数并填表。加减速程序流程图如下图2所示,也即查表执行加速 各档,匀速段,减速各档的过程。 假定将加速和减速段对称地细化为255段,使之成为锯齿状逐步逼近指数的曲线进行加、减速。
5 结语
本文运用指数加、减速方法实现单片机对步进电机的速度控制,利用离散化处理实现了步进电机的速度调节,根据指数规律函数计算各上升和下降阶梯时的频率,通过查表和定时中断威廉希尔官方网站 实现 步进电机的升降速控制。实验结果表明,用上文所述的升降速控制流程图编写的程序在实际运用中 电机运行平稳,能可靠地沿着所设计的指数型曲线运行,该方法简单实用且效果好。
-
单片机
+关注
关注
6035文章
44553浏览量
634753 -
控制系统
+关注
关注
41文章
6605浏览量
110581 -
步进电机
+关注
关注
150文章
3109浏览量
147447
发布评论请先 登录
相关推荐
步进电机的速度控制
步进电机的线速度控制 精选资料推荐
plc如何控制步进电机的速度和方向?
plc如何控制步进电机的速度和方向?






 工商网监
工商网监
评论