 通过单片机的无线通信软件实现编解码的解决方案介绍
通过单片机的无线通信软件实现编解码的解决方案介绍
随着无线通信芯片威廉希尔官方网站 的发展,越来越多的便携式或电池供电的无线传输设备进入人们日常生活中。例如,遥控车门开关(RKE)系统、汽车轮胎压力监视系统(TPMS)、无线内窥镜系统、蓝牙威廉希尔官方网站 等。利用单片机和无线数传模块来完成无线数据通信在石油、电力、水文、冶金等行业的无线控制、数据采集、报警诸多领域中有着广泛的应用前景。通常采用的办法是用单片机的串行I/ O 口来完成数据通信,但是该方法有许多不足之处:第一、在利用单片机的串口进行发送和接收数据时,对传输的数据只能进行奇偶校验,然而在无线通信场合,被传输的数据极易受到电磁、静电等的干扰,奇偶校验一般不能检测出这类干扰所引起的突发性错误,所以该方法无法满足差错检测要求较高的场合;第二、由于单片机一般采用异步通信方式,接受器通常不能很快的接收到有效数据,因而该方法也不能满足要求多路进行快速切换的场合;第三、单片机的串口通信在传输速率和每帧的有效数据位数等方面都受到了严格的限制,缺乏灵活性。本文针对低速无线通信的场合,提出了一种通过单片机用软件实现编解码的方案,该方案可以有效克服上述单片机串口通信的不足之处, 在无线通信中得到了令人满意的效果。
1 编码原理及程序流程
1.1 编码原理
假设传输的数据精度为12位,以A8BH为例,其帧格式如图1 所示,高位在先,低位在后。

数据的编码采用了曼彻斯特编码格式,每帧数据由同步头、有效数据位和校验位三部分组成。其中数据位“1”由高到低的跳变表示,数据位“0”由低到高的跳变表示,而且数据位“1”和“0”高低电平周期各为0.5 T(设T为一个数据位宽度)。根据曼彻斯特码的特点,每个数据位都由高低电平组成,因而在连续传输的有效数据位中不会存在超过一个数据位宽度的高电平或低电平,因此在每个数据的前面设一个同步头,高低电平各为1.5 T 。这样在进行接收数据时,只要采样得到的电平满足1.5T ,则认为该电平是同步头,开始接收数据。因为寻找同步头的时间最长不会超过一个数据的长度,所以此编码方式非常适合于要求多路进行快速切换的场合。为了简化电路和节省功耗,本文采用了单极性曼彻斯特码。
实现曼彻斯特软件编码比较简单,根据曼码和二进制数据的对应关系,一位二进制数据在编码后将占据两位空间。例如1在编码后变为1、0;0在编码后变为0、1。其中,曼码数据低位在前,高位在后;被编码的数据字节的高4位编码后存放在一个字节中,低4位编码后存放在相邻的下一个字节中。
本文采用了循环冗余校验,即后四位为循环冗余校验码。循环冗余校验码简称为CRC( CyclicRedundancy Code) 。循环冗余校验的指导思想是发送端将被传输的数据流多项式除以生成多项式得到冗余位,接收端将被传输的数据(包括冗余位) 除以事先确定的生成多项式,如果余数为零,则认为没有错误发生,不为零则表示有错。由于使用这种方法获得冗余位具有很强的信息覆盖能力,它善于发现各种类型的错误,特别是一些突发性错误,所以它是一种效率极高的差错校验法 。
根据CRC 码的编码思想,对(16,12)码,由x16 + 1确定生成多项式为G(x) = x4 + 1 ,该多项式也可表示成(10001) 。对被传输的12位数据和生成多项式采用模2 运算便可以得到每个数据的四位循环冗余位。
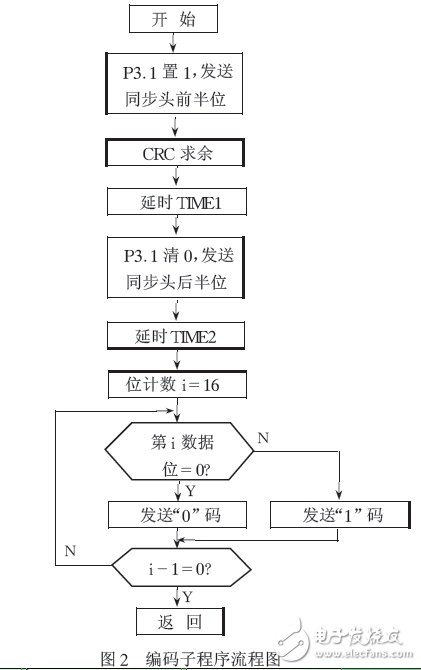
1.2 编码子程序流程图及说明
曼彻斯特编码子程序包括计算冗余位和曼彻斯特编码发送两部分,首先调用CRC 求余子程序(流程图略) ,将得到的冗余校验位作为待发送16 位数据的低四位,然后对该16 位,并通过无线数传模块调制成interwetten与威廉的赔率体系 信号发射出去(单片机的TXD 端与无线数传模块发的DATA IN 端相连) 。同步头及数据位发送是通过对单片机的TXD 端( P3. 1) 置“1”和清“0”并进行软件延时来实现。TIME1 和TIME2 为软件延时,以满足同步头高低电平宽度的要求。值得注意的是,在编写编码子程序时,应确保P3. 1 置“1”和清“0”时间间隔满足数据位或同步头宽度的要求。
2 解码原理及程序流程
2.1解码原理
曼彻斯特解码是编码的逆过程,也就是从曼码数据中提取时钟,并利用这个时钟还原二进制数据的过程。根据曼彻斯特解码过程中完成任务的不同,可以把曼彻斯特解码过程分为起始符识别及获取同步时钟、识别同步头、提取数据信息3个阶段。
(1) 同步头的判定
本系统通过信号高低电平所占的位宽来判断数据。当电平持续时间小于3/4的同步时钟周期时,电平时间为半个位宽,反之电平时间为1个位宽。因为在起始符识别时只用了2个字节0xFF中的一个,所以在开始识别同步头时识别出的第1个数据位肯定是‘1’,由此决定了在码元识别时必须遵循以下2点。
首先对单片机的RXD 端( P3. 0) 进行连续采样,从P3. 0 引脚变低时开始计时,若低电平的时间达到1. 3 T ,则认为该电平为同步头。因为用无线数传模块得到的信号波形一般为梯形,所以接收到的实际高低电平宽度可能变小,因此若接收到低电平宽度达到1. 3 T ,则可近似认为该电平为某数据的同步头。
(2) 数据位的判定
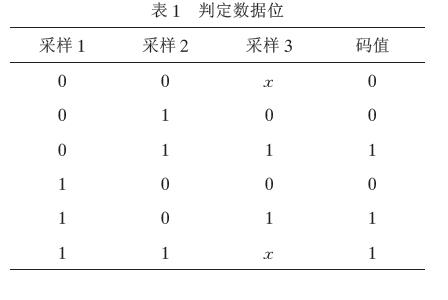
对每个数据位的判定采用“测三取二”的方法,既将每个数据位的前半部分成16 个状态,在第7 、8 、9 状态检测P3. 0 引脚上的电平,取其大于等于2的相同值作为测得值,如表1 所示(表中“ x ”表示“0”或“1”) 。此检测方法是在高电平或低电平的中间位置进行采样,既提高了采样准确度又有一定的滤波功能。
(3) 循环冗余校验
对解码得到的16 位数据进行循环冗余校验,若余数为零,则认为传输正确,否则进行出错处理。
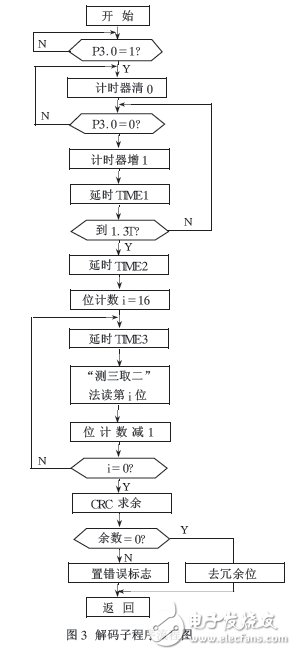
2.2 解码子程序流程图及说明
解码子程序包括曼彻斯特解码和差错校验两部分,其流程图如图3 所示。首先进行同步头的判定,从RXD 端( P3. 0) 为低电平时开始计时(单片机的RXD 端与无线数传模块收的DATA OU T 端相连) ,并对P3. 0 引脚进行连续采样,采样时间间隔可自行设定,若P3. 0 引脚的低电平时间达到1. 3 T ,则认为该低电平为某数据的同步头,然后对同步头后面的数据位的前半位采用“测三取二”的方法进行数据位的判定,最后对采样得到的16 位数据进行循环冗余校验,若余数为0 ,则置错误标志,若不为0 ,则去掉冗余位, 得到12 位有效数据。TIME1~TIME3 是凑采样的时间间隔。
3结论
本文以一个实际工程的一部分为例,阐述了用AVR单片机软件编程实现曼彻斯特编解码方法。经过了实际验证,数据传输可靠性很高,系统运行稳定,样机已经成型,即将投入生产。与其它的数据传输方法和曼彻斯特编解码方式相比,本方法十分灵活方便,它可以白适应射频发射机电池电压变化引起的数据传输波特率的变化。可处理的码速率也很高,极限码速率与所采用的单片机的速度和振荡器的频率以及采用的编程语言都有关系。本设计中采用C编程,振荡器频率为16MHz,数据传输率可达10kbps,用汇编语言编程数据传输率会更高。
-
芯片
+关注
关注
455文章
50711浏览量
423077 -
单片机
+关注
关注
6034文章
44554浏览量
634504 -
AVR
+关注
关注
11文章
1123浏览量
78641 -
无线通信
+关注
关注
58文章
4563浏览量
143495
发布评论请先 登录
相关推荐
PLC无线通信模块的工作原理 PLC无线通信模块网络配置
PLC无线通信模块威廉希尔官方网站 参数 PLC无线通信模块故障排除
请问有没有将音频编解码后的数字信号用UART传输的芯片?
无线通信测试平台的威廉希尔官方网站 原理和应用场景
基于51单片机的遥控开关仿真(双机通信)
数控机床无线通信解决方案精选

无线通信模块通过TCP/IP协议实现与PC端的数据传输
编解码一体机相对于传统的编解码设备有哪些优势?

音频处理的新选择:编解码一体机

什么是编解码一体机?






 工商网监
工商网监
评论