 关于基于模糊逻辑的汽车障碍物探测系统设计
关于基于模糊逻辑的汽车障碍物探测系统设计
0 引言
据国家统计局统计,驾驶员自身因素和行车低于安全车距是造成交通事故的主要因素。同时,随着汽车数量的增加,导致道路状况变得十分复杂,交通事故频频发生,不仅对人身安全造成严重伤害,而且每年因为交通事故导致的经济损失也高达数千万。因此,交通安全问题成为不能忽视的重大社会问题。
现今的障碍物探测传感器大多数是采用超声波传感器,因为利用超声波探测障碍物时有很多优点,例如它对雨、雪、雾等的穿透力强,衰减小,可以在雨雪等恶劣天气下正常工作[1]。但是,超声波探测物体时的方向性较差,用单一的传感器只能探测基本处于正前方的物体的距离,而不能判定被探测物体的方向。模糊逻辑理论在判断不确定性问题时具有良好的理论基础,将其与超声波传感器结合使用,可以使设计方案进一步优化,方向判断更加准确[2-5]。
本文所设计的车辆障碍物探测系统,是利用模糊逻辑理论和数据融合的思想,由多个超声波传感器组成探测网络,对障碍物进行距离和方位的探测[6-7]。此外,本探测系统可进一步实现GPS定位功能,能实时显示车辆的位置信息和周边信息,同时具有语音提醒功能,在紧急情况时及时通知驾驶员减速、注意前方有障碍物等,以此来减小交通事故发生的可能性,也可以实现停车安全、寻车管理等方面的功能。
1 超声波测距原理
汽车超声波障碍物探测系统利用了超声波测距原理:

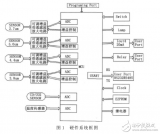
式中:S为待测距离,v为声音在空气中的传播速度,Δt为超声波从发射声波到接收的时间差。本文汽车超声波障碍物探测系统的结构框图如图1所示。当汽车在行驶过程中,超声波传感器也处于工作状态,装置在汽车周围的超声波传感器探头发送超声波,遇到障碍后产生回波,超声波接收器将接收到的信号传回主控单元,由主控单元利用模糊逻辑和数据融合算法完成数据的分析处理,并判断出障碍物的距离和方位,如果处在阈值范围内,语音模块将会发出警告信息,提示驾驶员进行相应的操作[8]。
2 硬件设计
由图1可以看出,本文的超声波障碍物探测系统由主控单元、语音播报模块、GPS模块和多个超声波传感器等构成。在主控单元中采用模糊逻辑和数据融合的思想对采集到的信息进行分析,判断出障碍物的具体距离和方位信息。
2.1 主控单元
主控单元是整个系统设计的核心,控制着整个系统的正常工作,承担着各个模块之间的数据融合,并利用相应算法对数据进行判断和处理。本设计使用STM32-F103RDT6作为主控单元,在主控单元上搭载μC/OS-Ⅲ实时操作系统,并利用USART串口通信实现主控单元与各个模块之间的数据通信和主控单元对各个模块的控制和调度,以此来保证系统的实时性和稳定性。
2.2 超声波障碍物探测网络
超声波障碍物探测网络是本设计的核心,包括发射和接收两部分。选取的是US40-16C超声波探测器,它具有发送超声波和接收超声波一体化的结构特性,这样就节省了很大的安装空间。同时,US40-16C超声波探测器具有较大的探测范围(辐射范围大约为75°)和较长的探测距离,可以通过其测得前方18 m之内障碍物的距离信息。
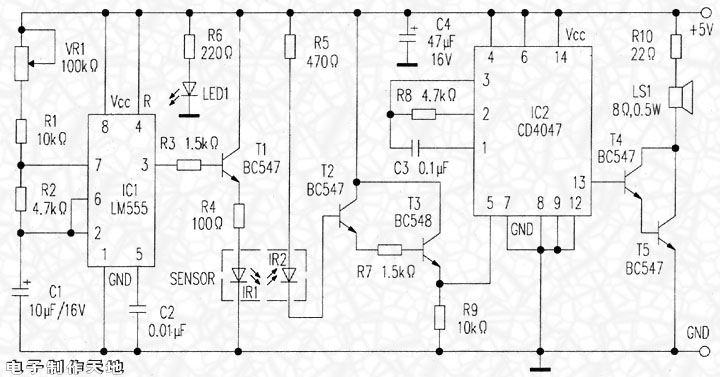
系统超声波发射电路是由超声波驱动电路和超声波传感器网络组成。超声波发射电路如图2所示,其中STM32的高级定时器TIM1输出40 kHz、占空比为50%的互补PWM信号,分别传输到SP3232的T1IN和T2IN,然后产生+6 V和-6 V的电压,并且在T1Out和T2Out端产生12 V的电压驱动超声波传感器发射40 kHz的超声波,每次发射8个周期脉冲。电路通过9013三极管来控制SP3232电源的开关,发射之前打开SP3232的电源,等到电路稳定后开始发射超声波,并在发射之后关闭SP3232的电源。这样不仅可降低发射电路对接收电路的干扰,而且还可以降低功耗[9]。
超声波接收电路的主要作用是接收超声波信号,它由信号整形部分和信号采集部分组成。由于反射波信号会由于距离的增大而减小,因此本系统利用NE5532对发射信号进行放大、滤波处理。超声波接收电路如图3所示。
超声波探测器在测量物体距离上具有很好的优势,但是在探测物体的实际方位时存在很大的缺陷,而现实中障碍物可能存在于汽车的任何方位。为了实现汽车周围障碍物距离和方位的同时测量,本系统使用6个超声波传感器,每3个放置在同一水平高度不同指向(车头和车尾),编号依次是1、2、3、4、5、6。根据传感器网络所采集的障碍物的位置信息将传感器网络划分为10个区域,编号依次是 A、B、C、D、E、F、G、H、I、J,前5个分别表示汽车车头的左方、左前方、前方、右前方、右方区域,后5个分别表示汽车车尾的左方、左后方、后方、右后方、右方区域。当探测器网络探测到障碍物后,将利用模糊逻辑算法进行数据融合,通过隶属度函数判断出障碍物的距离和方位信息。
3 软件设计
由于1、2、3和4、5、6传感器呈对称设计,因此本文只研究车头部位的1、2、3传感器网络,如图4所示。
由于障碍物可能出现在不同的探测区域,同一个超声波传感器会采集到不同的数据,因此使用多次反射法来探测障碍物的位置信息。多次反射法就是在传感器探测网络运行时,第一次传感器1发出超声波信号,同时使1、2、3号传感器处于接收回波模式状态,当检测到回波时,会把各个探测器测到的障碍物的距离信息进行存储。但是,如果障碍物的距离超过传感器的探测范围时,也就是探测器不会探测到障碍物时会自动存为0。第二次使2号传感器发出探测信号,1、2、3号同时接收信号并存储距离信息;第三次使3号传感器发出探测信号,1、2、3号同时接收信号并存储距离信息。
经过上述的探测过程,会得到9个障碍物距离数据,并存储到一个3×3的向量空间中。由于障碍物出现在不同区域时,相同传感器获得的数据不同,所以可以利用模糊逻辑理论中的隶属度函数关系来探测障碍物的距离和方位信息。本传感器网络采用以障碍物距离为变量的隶属度函数,距离越小,隶属关系越大。因此,可以利用测得的距离数据定义一个隶属度函数[10]:
式中,i=1,2,3为探测传感器的编号;rij为第i号传感器接收第j号传感器的回波所测得的障碍物的距离,j=1,2,3;uij为第i号探测器探测时,障碍物对传感器j的隶属度。由式(2)可以得到一个隶属度空间:
在隶属度空间中,矩阵的每一列都是障碍物对第j号传感器的隶属度,因此对矩阵的每一列进行求和运算,如式(4)所示:
由式(4)可以求得障碍物对第j号传感器的隶属度的总和 根据
根据 的大小,通过计算得δ=0.05。根据δ与
的大小,通过计算得δ=0.05。根据δ与 的关系可判断障碍物位于图4的5个设定区域中的哪一个,如表1所示。
的关系可判断障碍物位于图4的5个设定区域中的哪一个,如表1所示。
其算法为:
利用此方法,可以判断出障碍物的实际方位。
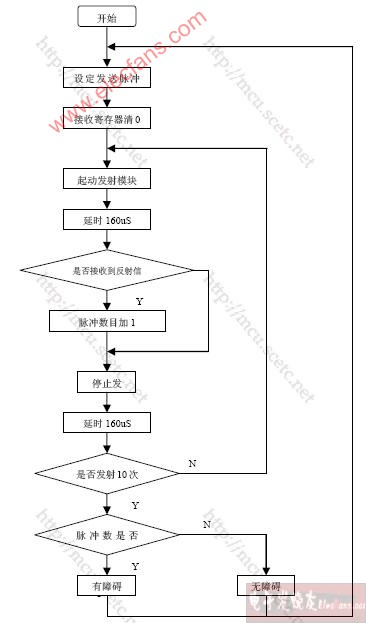
假定将传感器网络中探测警戒阈值设置为a=150 cm,当传感器网络探测到障碍物时,如果距离小于150 cm时,语音模块将会发出提示警告。具体的工作流程如图5所示。
4 实验结果分析
本文介绍了传感器网络对于障碍物位置信息的测试方法,通过此方法不仅可以测得障碍物的距离信息,还可以测得障碍物的方位信息,使障碍物的位置信息更加明确。例如,试验中将障碍物放置在距离传感器网络150 cm处的A、B、C、D、E区域中进行测试,得到测试结果如表2所示。
当今世界上做得较好的汽车避障系统要数奔驰S级轿车应用的Distronic Plus威廉希尔官方网站 [11]。该系统可以测得汽车前方物体的相对距离,如果汽车处于危险范围内,系统将会通过警示灯和蜂鸣器发出警报信号,提醒驾驶员减速、避障等操作,但是驾驶员并不能掌握汽车盲区的障碍物信息。此外,在汽车倒车雷达系统方面,平原大学朱利娜[12]、重庆科技学院高月华[13]、西安航空学院王莘[14]虽然对超声波测距进行创新和优化,但是一方面采用单个超声波传感器只能测得障碍物的距离,并不能测得障碍物的方位信息;另一方面,测得障碍物位置信息误差大,因此对驾驶员判断障碍物的具体位置还是存在一定的缺陷,而且对汽车前部和尾部的盲区检测不到。本系统采用三相超声波传感器网络不仅可以测得障碍物的距离信息,还可以测得障碍物的方位信息,对驾驶员判断障碍物的具体位置有非常好的辅助作用。
5 结语
本文设计的传感器网络利用了模糊逻辑理论和数据融合算法思想,不仅可以实现传统超声波传感器测量障碍物距离的功能,而且还可以实现测量障碍物方位的功能,能够准确地判定障碍物的具体信息。在测量障碍物时采用了多次反射法,提高了测量的准确性和稳定性,对保障行车安全具有重要意义。
本文的车辆防碰撞系统未来还可以配合机器视觉判断障碍物形状及位置,有益于实现行车/停车安全、寻车管理等功能,在无人驾驶威廉希尔官方网站 领域具有广阔的应用空间。
-
传感器
+关注
关注
2550文章
51061浏览量
753280 -
接收器
+关注
关注
14文章
2468浏览量
71891 -
超声波
+关注
关注
63文章
3014浏览量
138359
发布评论请先 登录
相关推荐
基于超声波传感器的自主移动机器人的探测系统
做卷帘门障碍物探测器,求指教!
做卷帘门障碍物探测器,求指教!
BSD盲点探测系统
基于超声波传感器的自主移动机器人探测系统
红外线障碍物探测器相关资料分享
苹果再获得激光专利:“障碍物探测”系统
地下车库CO探测系统的设置与安装
测距避障传感器在城市轨道障碍物探测系统中的应用威廉希尔官方网站 方案





 工商网监
工商网监
评论