 关于基于双核DSP的被动声探测系统的设计
关于基于双核DSP的被动声探测系统的设计
0 引言
被动声探测威廉希尔官方网站 使用传感器阵列接收各种目标辐射的噪声信号,运用阵列信号处理和信号识别等威廉希尔官方网站 ,确定目标的方位、航迹和类型。被动声探测威廉希尔官方网站 具有全被动、隐蔽性强、全天候和低功耗、低成本的优点,特别适合夜间、雾霾天等能见度不良、通视性差或电磁环境复杂条件下对运动目标的感知,是战场信息侦查及城市安全防护领域不可或缺的信息获取手段。
声音信号容易受到周围环境噪声的干扰,引起虚警或探测性能下降。为了提高被动声探测的准确性,需要引入噪声抑制、目标分类识别等算法,这对信号处理器的硬件性能提出了较高的要求。传统的被动声探测系统往往需要使用多片DSP并行处理的硬件架构来满足需求[1-2],因而带来了产品体积功耗的增加以及生产工艺复杂度的提升。近年来,阵列信号处理和声探测领域都有很大的发展,出现了一些新的威廉希尔官方网站 和算法[3-4],受限于嵌入式处理平台的性能,这些威廉希尔官方网站 并未实现工程化批量应用。
随着集成电路威廉希尔官方网站 的不断发展,嵌入式应用中的多核DSP芯片应运而生,给高性能数字信号处理系统设计带来了新的解决方案。TMS320C6657[5]是德州仪器(TI)公司推出的一款以KeyStone多内核架构为基础的双C66x内核数字信号处理器,非常适合高性能低功耗可编程应用。本文基于近几年声探测领域的新威廉希尔官方网站 ,提出了一种以TMS320C6657为信号处理单元,使用24位高分辨率ADC采样的被动声探测系统,实现数据的采集、目标定向和分类识别等功能,具有高实时性、良好的功能扩展性等特点,性能指标较原有系统有了较大的提高。
1 系统总体设计
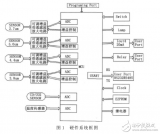
系统由声传感器阵列和声探测主机两部分组成。
声传感器阵列是由若干个传声器按照一定规则组成的阵列,接收探测目标辐射的噪声信号。
声探测主机由interwetten与威廉的赔率体系 电路、数字电路和控制电路组成。模拟电路对声传感器阵列接收的微弱信号进行放大、调理、均衡,并将预处理后的信号送至数字电路进行处理;数字电路实现对目标声信号的模数转换以及定向、识别算法;控制电路用于实现系统的人机操作和外部接口功能。
系统组成如图1所示。
2 硬件设计
2.1 模拟电路
根据目标信号特征和阵列信号处理对信号拾取的要求,声传感器阵列各传感器及其对应的模拟通道之间的幅频和相频特性应具有较高的一致性。
设计中选用高品质低噪声运算放大器作为模拟电路的核心器件,设计了固定增益的放大电路和四阶巴特沃斯滤波器电路。在工艺上,选用优质电路板材,并通过对关键位置的阻容元件进行严格的环境应力筛选和一致性挑选,以控制电路的一致性和稳定性。
传统的声探测系统采用16位以下ADC进行模数转换,而受分辨率的影响,为了达到较高的转换精度,需要根据信号的幅度对模拟电路的放大增益进行自动调整。由于模拟电路是电噪声敏感性单元,为了避免数字噪声的影响,增益控制信号需要进行隔离设计。此外,在增益改变的瞬间,会产生非正常的数据突变,对系统的探测性能产生不确定的影响。
为了避免这些问题,本设计根据目标声信号的特征和系统对探测距离的要求,选定了一个固定的增益倍数,而分辨率问题则由高分辨率模数转换来解决。模拟电路功能组成如图2所示。
2.2 数字电路
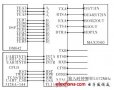
数字电路首先对多个通道的模拟信号进行模数转换,然后将得到的数字信号送入双核DSP进行实时处理,完成对目标的定向和识别,并把处理的结果发送给控制电路。数字电路原理框图如图3所示。
本系统的模数转换电路使用TI公司的8路同步采样24位分辨率的ΔΣ模数转换芯片ADS1278,保证了在不改变前端放大电路增益条件下的转换分辨率,避免了增益档跳变所带来的影响。为达到最佳性能,每路输入信号经过差分驱动转换成差分信号供给ADS1278的输入端。差分驱动器选用TI的低功耗全差分4路放大器THS4524。
本系统将两片ADS1278用菊花链的方式级联,实现了16路模拟通道的同步采样。ADS1278工作在SPI模式下,使用FPGA对其进行控制。
FPGA主要有3个功能:一是用于DSP的复位、上电顺序控制以及启动加载模式的选择;二是完成数据采集,包括ADC芯片工作时钟产生、SPI总线控制等;三是将数据通过Upp接口发送给DSP进行处理。FPGA选用XILINX公司的Spartan6系列芯片XC6SLX9FTG256。
实现定向、识别算法的核心器件是双核处理器芯片TMS320C6657。外挂SPI接口的NOR Flash用于存储固件,一片128 MB的DDR3用作扩展内存。DSP的两个内核运行在1 GHz的主频下,core0用于引导加载固件、内核及外设的初始化配置、数据采集以及定向算法,core1用于分类识别算法。
最终的处理结果由UART接口发送给控制电路。
2.3 控制电路
控制电路用于人机交互,包括当前工作状态指示、OLED显示屏和小键盘的菜单操作,显示包括自检结果、目标方位、目标类型在内的各种状态信息,监控电源电压、电量以及声音报警。同时,控制电路将探测结果通过标准的RS232接口输出,方便系统扩展多站融合、远程监控等功能。控制电路的核心器件为微控制器芯片MSP430F5438A,该芯片存储资源和外设资源丰富,仅需少量的外围器件就可完成控制电路的功能。
控制电路的原理框图如图4所示。
3 探测软件设计
声探测软件的核心功能是实现对目标的声学定向和识别,相应的数据输入、参数设置、通信和自检等软件接口用以确保系统运行时的正常工作。
探测软件的全部功能可以分为定向模块、识别模块、自检模块和信息交互接口模块。软件构成如图5所示。本文重点介绍定向和识别两个模块。
3.1 定向模块
诸如空中飞行器、地面车辆等目标,由于在结构上具有周期转动机制(发动机、螺旋桨等),其辐射噪声信号的功率谱主要是由离散谱叠加在连续谱上,呈现较强的线谱特征,且线谱之间具有明显的谐波关系。
定向软件模块针对目标声信号的特征,采用相应空时信号处理方法实现对目标的定向功能。输入为16个通道的阵列信号,处理后获得目标个数信息、各个目标的方位、能量标记信息。
针对环境中有强噪声干扰的情况,软件在开机初始时间进行短时环境噪声学习,判断是否需要运用自适应噪声抵消威廉希尔官方网站 提升信噪比。之后综合运用小波线谱检测和傅里叶线谱检测,加强目标线谱集信号的检测能力,提高发现概率。线谱集检测流程如图6所示。
在定向环节,采用波束域滤波威廉希尔官方网站 ,通过对其他方向噪声的抑制,增强对目标方向的接收信噪比。定向算法流程如图7所示。
3.2 识别模块
目标识别软件是采用数学和智能方法对目标信号的特征进行提取和选择,对模式特征进行分类决策后得到目标类型。通过对多种螺旋桨飞机、固定翼飞机和地面车辆等目标的辐射噪声进行分析可知,其功率谱特征能够区分各类目标。
在远距离目标探测时,声信号经过长距离传播衰减较大,声传感器阵列接收到的信号信噪比较低,必须进行信号增强。信号增强方法可以与定向模块中的线谱集检测方法复用。
目标识别分类流程包含了信号采集、信号预处理、特征提取及选择、识别分类、融合识别5大部分,每个部分包含了若干细节流程。各通道的目标声信号都包含有环境噪声、风噪声等其他噪声,这些噪声有的属于白噪声,有的属于色噪声,噪声的存在降低了有效声信号的信噪比,在时域对各通道信号进行滤波可提高信噪比,提取能充分体现目标类型的特征,基于不同领域的特征设计子神经网络、模板匹配分类器,各目标分类器都输出目标识别类型置信度,利用融合识别威廉希尔官方网站 对各目标类型置信度进行融合识别,最终输出目标类型。整体识别分类流程图如图8所示。
3.3 双核并行处理设计
本系统主要完成定向和识别算法。根据计算量,将两个算法分到两个核中。Core0主要完成定向算法,Core1主要完成识别算法。因为目标识别需要用到定向算法的结果,两个Core采用串行计算的方式,Core1在第3秒输出第1秒的定向和识别结果。并行处理的软件时序图如图9所示。
并行处理设计中,数据的共享和核间通信尤为重要。TMS320C6657片内集成了1 024 KB的共享内存,用于存储Core0采集的每秒声阵列数据以及定向算法的结果。核间通信的内容有:Core0通知Core1数据准备完毕;Core0通知Core1已出定向结果;Core1通知Core0数据已经使用完毕。Core1只有在Core0通知后才能访问共享内存,把数据搬移到自己的L2内存中,而Core0在收到Core1读取完数据后,就可以随时更新共享内存中的相应内容。
核间通信(IPC)的功能可以使用中断的方式,也可以使用查询的方式。TMS320C6657具有IPC发生寄存器和IPC应答寄存器,可以产生IPC中断和应答。中断的方式不需要Core的干预,可以最大限度地节省处理时间。查询方式在软件实现上较为简单,但会浪费一些指令周期。本设计中,通过实测发现每个核运行各自的算法,1秒内的计算还留有较大的时间裕量,因此IPC选用查询的方式。在程序中定义全局标志位变量,当每个Core完成操作后对标志位置位,另一个Core在需要操作共享内存时就对标志位进行查询,确保操作的正确性。
4 系统验证
本设计已经应用到了实际的声探测领域,实现了对多种目标的定向识别。经过大量的实际测量证明,系统各项指标较传统声探测系统有了明显提高。
双核DSP的并行数据处理解决了多通道大数据量的实时处理和多种不同目标分类识别、定向算法的处理带宽问题,使得很多创新型算法得以在嵌入式系统产品中实现。
-
dsp
+关注
关注
553文章
7987浏览量
348774 -
探测系统
+关注
关注
0文章
58浏览量
11265
发布评论请先 登录
相关推荐
天基红外探测系统的杂散光分析与计算
BSD盲点探测系统
基于DSP无人值守地面探测系统的硬件设计
基于DSP的毫米波主被动复合探测器目标识别系统设计【回映分享】
DSP+CPLD空间瞬态光辐射信号实时探测系统
基于DSP_BIOS大空间网络型火灾探测系统设计
基于多DSP并行处理的声探测系统设计解析

基于单片机和DSP的被动声目标探测平台设计方案资料下载

地下车库CO探测系统的设置与安装
无人机探测系统可使用GC1101射频前端集成芯片





 工商网监
工商网监
评论