 关于一种基于动态规划的机动目标检测前跟踪方法
关于一种基于动态规划的机动目标检测前跟踪方法
0 引言
检测前跟踪(Track-Before-Detect,TBD)威廉希尔官方网站 是一种有效的雷达微弱目标检测方法,并且在多个领域有着广泛的应用。这种威廉希尔官方网站 不对单帧的数据做目标检测判决或航迹回溯,而是通过对目标的多帧数据信息进行积累,之后宣布检测结果并同时给出目标的运动轨迹。动态规划(Dynamic Programming,DP)算法是检测前跟踪威廉希尔官方网站 中的一种[1-4],它利用穷尽搜索的思想,将目标的整体轨迹搜索问题分解为分级优化的问题,具有效率高、硬件可实现的优点。
基于动态规划的检测前跟踪算法最早应用于红外弱目标的检测上,近年来该检测算法也应用到雷达系统当中[5-6]。这些应用均假设目标具有匀速直线运动或慢机动目标运动特性,利用目标的初始速度确定动态规划算法针对每一帧的搜索范围,从而匹配目标的运动轨迹,达到较好的检测跟踪效果。然而,一旦运动目标不具有匀速直线运动或者慢机动目标运动特性时,由于运动模型不匹配,搜索范围将发生很大变化[7],从而不能够有效地对目标进行检测跟踪,动态规划算法的性能严重下降。
本文将动态规划算法与交互式多模型滤波算法结合在一起,提出了一种新的针对机动目标的检测前跟踪算法。该算法根据近程毫米波雷达探测范围内的目标为行人或机动车辆的特点,引入多个目标运动模型取代传统单一模型跟踪方法[8-9],在每一组数据动态规划算法处理后,针对之前的运动状态,采用交互式多模型滤波算法对各个模型的概率进行调整,并按照相应的概率对每个模型的状态估计进行加权,实现机动目标运动模型的更新。
1 问题模型描述
1.1 目标运动模型集
1.2 目标量测模型
假设量测平面有Nx×Ny个分辨单元,并且各分辨单元和各帧之间的观测噪声相互独立,第k时刻的量测数据可通过一个Nx×Ny的矩阵表示为:
其中,Ck表示点目标在分辨单元(i,j)处的信号强度;wk为分辨单元(i,j)处的观测噪声,并满足均值为零、方差为σ2的高斯分布。
2 算法介绍
2.1 动态规划算法原理和步骤
动态规划算法在状态转移区域中通过对可能的目标运动轨迹和值函数的积累,提高目标的信号强度,从而实现对微弱目标的检测跟踪性能改善。其核心思想是利用分段优化的办法,将高维优化搜索的问题分解为多个低维优化问题,大大减小了计算量。假设动态规划算法一次循环中有K帧数据,具体的操作步骤如下:
由上可知,目标的转移范围和运动方向是由目标的初始位置和速度决定的。传统动态规划算法假定目标做匀速直线运动或者具有弱机动特性条件下,设定目标的初始速度,具有良好的检测性能;然而,当目标做转弯运动或者匀加速运动时,搜索范围与目标模型不匹配,动态规划算法的性能会严重下降。如果加大搜索范围或每相邻两帧通过滤波算法对速度实时更新,算法的复杂度和运算量都会大幅度增加,不利于实时响应运算和工程化实现。
2.2 多模型动态规划算法
为了弥补动态规划算法不适用于机动模型的局限性,同时不增加过多的计算负担,本文提出了多模型下的动态规划算法,该算法将交互式多模型滤波中的多模型及模型切换引入到动态规划算法中。根据近程毫米波雷达探测目标的运动特性,本文利用3种可能的运动模型进行建模描述,记目标进行匀速运动的运动模型为M1(t),目标进行匀加速运动的运动模型为M2(t),匀速转弯运动的运动模型为M3(t)。
本文提出的交互式多模型动态规划算法具体实现过程中,首先根据近程毫米波雷达扫描周期快(扫描周期T≤10 ms)的特点,近似认为目标在动态规划算法一个循环周期内的K帧运算数据近似保持匀速直线运动;为了能够预测和跟踪机动目标,在完成一个循环周期的动态规划算法后,结合前一个周期目标的初始状态,采用多模型滤波方法预测目标的状态,作为下一动态规划算法周期的初始值。具体算法流程为:
3 实验结果与仿真分析
本文采用了基于短时宽锯齿波调制方式来探测目标,发射机在一个周期内连续发射多个短时宽锯齿波,对所有锯齿波的一维FFT结果在另一个维度上再做一次FFT(二维FFT),从而得到探测范围内的二维距离-速度信息,具体参数如表1所示。
3.1 转弯运动目标仿真
仿真实验目的是比较多模型动态规划算法与传统动态规划算法检测转弯目标性能。假设目标初始位置状态为(x1,y1)=(12,20)(单位:m),积累帧个数K=3,虚警率Pfa=1×10-3,转弯速率w为0.1 rad/s、0.25 rad/s、0.5 rad/s,Monte-Carlo仿真次数为1 000次。
图2给出了转弯运动航迹检测的仿真结果。当w=0.1 rad/s时,两种算法的性能差别不大;当w为0.25 rad/s、0.5 rad/s时,多模型动态规划算法性能在SNR>10 dB以后明显优于传统动态规划算法,在w=0.25 rad/s时,多模型动态规划算法的检测概率要高约15%,在w=0.5 rad/s时高约21%。结果表明,当w≥0.1 rad/s时,目标的转弯行为更为明显,多模型动态规划算法的性能要比传统动态规划算法好。
仿真结果表明,当w很小时,目标做近似匀速直线运动,此时多模型动态规划算法的检测性能没有太大的优越性;随着w的增大,目标做转弯运动,多模型动态规划算法比起传统的动态规划算法具有更高的检测概率及更好的跟踪性能。
3.2 匀加速运动目标仿真
仿真实验的目的是比较多模型动态规划算法与传统动态规划算法检测匀加速目标的性能。假设目标的初始位置状态为(x1,y1)=(12,20)(单位:m),动态规划积累帧个数K=5,航迹虚警概率Pfa=1×10-3,目标加速度(ax,ay)为(0.1,0.1)、(0.1,1)、(0.1,2)(单位:m/s2),Monte Carlo仿真次数为1 000次。
图3为本文方法与传统动态规划算法的对比,当(ax,ay)为(0.1,0.1)(单位:m/s2)时,目标近似为匀速直线运动,此时多模型动态规划算法基本等同于传统算法。当(ax,ay)为(0.1,1)和(0.1,2)(单位:m/s2)时,多模型动态规划算法性能在SNR>10 dB以后明显优于传统动态规划算法,仿真结果显示多模型动态规划算法的性能要比传统动态规划算法好。
4 结论
针对动态规划算法检测机动目标效果差的问题,本文提出了一种基于交互多模型的动态规划检测前跟踪算法。该算法将交互多模型的模型转换和状态预测融入到动态规划的过程中,从而实现对目标模型的动态估计和转换,避免了单一的目标模型引起的搜索范围失效导致无法有效检测机动目标的缺陷。仿真结果显示,基于交互多模型的动态规划算法在检测机动目标时的性能要明显优于传统动态规划算法,同时具有较快的处理速度,便于工程化实现。
-
雷达
+关注
关注
50文章
2930浏览量
117468 -
毫米波
+关注
关注
21文章
1923浏览量
64784
发布评论请先 登录
相关推荐
基于Mean Shift的红外目标自动跟踪方法
一种用于三维空间杂波环境机动目标跟踪的数据互联方法
一种基于Hausdorff距离的目标跟踪算法

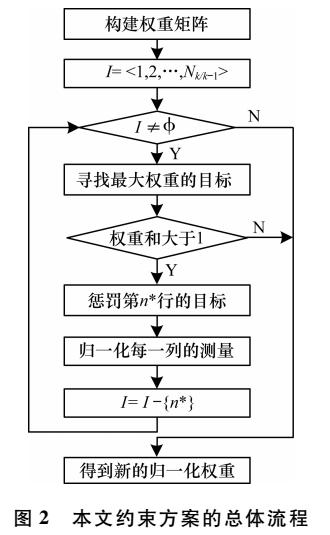
一种约束权重的改进多目标跟踪方法






 工商网监
工商网监
评论