 关于超前滞后零极点频率补偿器原理及应用
关于超前滞后零极点频率补偿器原理及应用
零极点补偿器(Pole-zero compensator)常用于修正反馈放大器回路的幅度和相位。这篇文章超出了教科书标准的解释程度,本文考虑了工程师在使用补偿器设计电路时需要注意的地方,甚至还涉及了补偿器设计所采用晶体管的细节。
无源补偿器
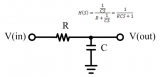
零极点补偿器可以是超前-滞后或滞后-超前补偿器。它们经常出现在电路和控制理论教科书中。最常见的无源电路补偿器有三个器件:两个电阻和一个电容。图1所示的电路放置在放大器内方便的位置,尤其是在反馈回路中,以提供额外的相位或高频幅度“加重”。
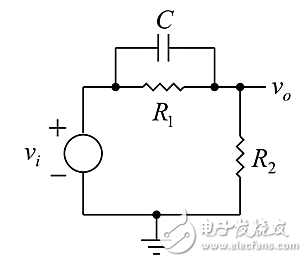
图1:典型的无源电路补偿器。
该电路本质上是个RC分频器,增加了与C并联的电阻R1。R1、C组合的阻抗为:
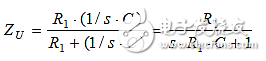
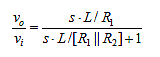
那么,传递函数就是分压器公式:
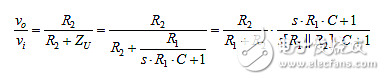
第一个因子是准静态(0 + Hz)增益,即没有C的分压器。动态或频率相关因子在ωz =–1/R1C处有一个零点;在ωp =–1/(R1 || R2)C处有一个极点。
当使用波特(Bode)或频率响应图时,使用频率ω的大小(即其绝对值),负号被丢弃。
但是,请记住,波特图上的极点和零点频率不是正极点和零点——通常不是,但如果是的话,它们在图示上仍然是正的。
由于并联电阻的阻值比R1低,所以它们也具有较低的时间常数和较高频率。极点频率比零点高。
随着频率从低值开始增加,零点开始在低于ωz约十分之一的地方产生正向(超前)相位,它以45o/dec的线性增加,直到ωz为+ 45°。然后再高十倍,达到+90o;其在ωz的每一侧都有十倍的相位影响。
类似,极点在ωp周围有±10倍的相位相等范围,但在ωp的每一侧以–45o/dec线性地贡献负(滞后)相位。在ωp,极点的相位贡献是–45o。(极点或零点相位线性近似的最大误差约为±6o。)
如果ωp > ωz超过二十倍,则极点与零点之间不存在相位的相互作用,可以实现从零点开始的完整的+ 90°相位。
零点相位超前位于回路增益幅度||GH||=1附近,位于回路的横向或单位增益或交叉频率fT处。
对于||GH||< 1,回路没有足够的反馈幅度(与正弦波幅度相同)来维持振荡。
反馈电路中的常见问题是相位滞后或延迟过大,以及回路周围的相移(回路增益GH)太接近-180°(-π,以弧度表示)。回路中添加补偿器以加大正相位。这增加了相位裕度,即给定频率与-180°(回路振荡处)之间的回路相位差。
因此,一般的反馈设计目标是在fT处将回路相位保持在-180°以上,以实现正相位裕度。
理想情况下,补偿器只应贡献零点而没有极点,但实际的interwetten与威廉的赔率体系 电路总是产生不少于零点的极点。(在系统级,通过并联电路、有方法可以规避这种情况,例如在PID补偿器中。而在柏拉图式的理想DSP世界中,可以无极点地编程零点,但不能实时实现!)
超前-滞后补偿器有一个不需要的极点伴随着所需的零点。使用该电路进行补偿设计的挑战是将零点放置在需要额外(正)相位的位置,同时将极点放置在对回路动态性能无关宏旨的较高频率处,高于fT十倍以上是不错的选择。
为分离极点和零点,必须通过使R2 < < R1来分开时间常数。然而,这也使得分频器准静态增益 < < 1。是利是弊,取决于回路。对于由准静态回路增益太大导致振荡(或循环过度)的回路,GH0不仅会产生零点增加相位,而且由分频器引起的GH0的减小会使波特幅度曲线向下。因幅度随频率下降,fT经由移动到图2中左侧(如图2所示)而降低——下降到相位延迟不那么大且回路更稳定的位置。

图2:使用补偿器后的波特图变化。
另一方面,如果回路的极点太多,但又必须保持回路增益以满足精度(准静态误差)要求,则超前-滞后补偿器不是合适的补救措施。 零点可以用来消除不需要的极点,但频率更高的补偿器极点仍存在。
实际上,补偿器只是将回路极点转移到更高频率,尽管不超过十倍。 这有时太过微不足道。
因此,当额外的零点和减小的准静态增益都有利于控制时,最好使用超前-滞后补偿器。
双无源和有源补偿器
接着反馈回路的零极点补偿器继续讲,并提出了一些教科书中通常看不到的方法。 双(dual)RC超前-滞后补偿器是RL超前-滞后补偿器,如下所示,其传递函数为:

不采用并联-R极点,双重补偿器采用串联-R极点、时间常数τp=L/(R1+R2);而零点时间常数为τz = L/(R2)。极点的串联-R大于零点的,在时间常数的分母中,极点频率较大:对于RC超前-滞后电路,ωp>ωz。
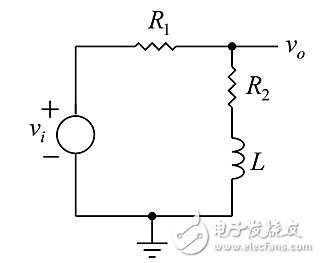
图3:双重补偿器电路图。
用电容来实现电路通常比用电感更合适,但有个有趣的例外:即当电感由晶体管和电阻合成时,如图4所示。
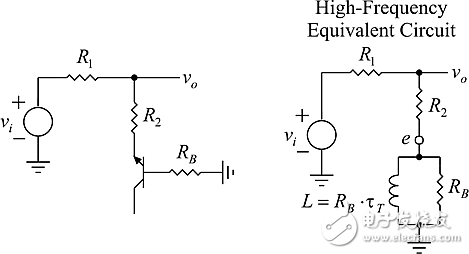
图4:电感由晶体管和电阻合成的补偿器及其高频等效电路。
在fβ(β(s)开始滚降)和fT(β(s)=1)之间,是晶体管的高频(hf)区域,其中基极阻抗在发射极旋转+ 90°。
在该hf区域中的基极电阻RB采用如右侧所示的等效电路(并联RL),其中电感值取决于BJT的速度(由fT表示),并在表述L的公式中用作τT,其中τT = 1/ωT = 1/2 x π x fT。
该等效电路可方便地用于在高频区补偿的超前-滞后补偿器。它与L被RB分流的无源版本不同。
当为传递函数求解该hf等效电路时:
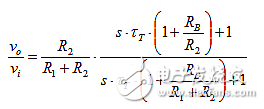
该电路有一个零点和一个极点,极点/零点频率之比为:
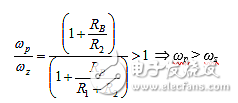
通过R1>>R2分开极点和零点。(接近或在同一频率上的极点和零点是双重点(doublet))。其对准静态增益产生的效果与对无源电路的相同。RB影响极点和零点的位置,并在频率上移动极点和零点。极点和零点被限制在高频区域,或者当回转(gyration)停止在该区域之外时,L“消失”。在fβ以下,仅为RB/(β0+1)。
该主题的一个变化如下所示,采用了并联L、R2,而非串联。
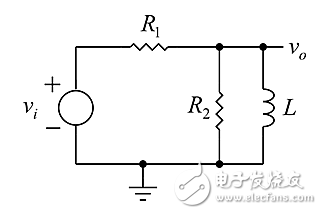
图5:变化后的补偿器电路。
RL超前-滞后补偿器的传递函数为:
它与RC补偿器在形式上的类似处在于都具有并联-R极点,不同处在于在原点(origin)有零点。零点和极点频率分别为ωz=–1/(L/R1)和ωp=–L/[R1||R2];其中零点频率是零点增益达到一时的频率。利用了相同的一般考虑。

图6:有源补偿器及其高频等效电路。
滞后-超前补偿器通过安置ωp<ωz以降低低频下的回路增益,然后当fT接近以-1双对数斜率穿越fT的平稳过渡时,将幅度响应从零点展开(flare out)。相同的有源器件电感合成可用于合成有源滞后-超前电路。
-
补偿器
+关注
关注
0文章
86浏览量
14110
发布评论请先 登录
相关推荐
无功功率补偿器显示欠电流的原因

无功补偿器报警零流保护是什么
相位补偿和频率补偿区别原理和分析其过程?
如何使用示波器观察电流的超前和滞后
1600千伏需要多大电容补偿器
无功补偿器怎么调到自动补偿
无功补偿器互感器的精度是什么意思
电力电容补偿器故障的危害
无功功率自动补偿器不工作的原因
什么是零极点电路 零极点仿真原理





 工商网监
工商网监
评论