 伺服系统复合控制威廉希尔官方网站
和非线性补偿威廉希尔官方网站
伺服系统复合控制威廉希尔官方网站
和非线性补偿威廉希尔官方网站

本文首先介绍了伺服系统威廉希尔官方网站 的要求,其次阐述了伺服系统复合控制威廉希尔官方网站 和非线性补偿威廉希尔官方网站 ,最后介绍了伺服系统常用的线性补偿,具体的跟随小编一起来了解一下。
伺服系统威廉希尔官方网站 的要求
1、系统精度
伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差、稳态误差和静态误差三个方面组成。
2、稳定性
伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能力;或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力。
3、响应特性
响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率。响应速度与许多因素有关,如计算机的运行速度、运动系统的阻尼和质量等。
4、工作频率
工作频率通常是指系统允许输入信号的频率范围。当工作频率信号输入时,系统能够按威廉希尔官方网站 要求正常工作;而其它频率信号输入时,系统不能正常工作。
伺服系统复合控制威廉希尔官方网站 和非线性补偿威廉希尔官方网站
一、复合控制威廉希尔官方网站
1、扰动补偿的不变性原理
控制系统工作时,除有控制输人外,常有扰动作用于系统,为使系统输出精确地复现输人,必须对扰动进行补偿,为此有人曾提出了扰动补偿的“不变性原理”。
2、复合控制伺服系统
在按误差控制的基础上,再引入前馈补偿通道(亦称扰动控制),即构成复合控制系统,亦称开环一闭环控制系统。
3、模型跟踪控制系统
模型跟踪控制系统看作是复合控制的一种形式。
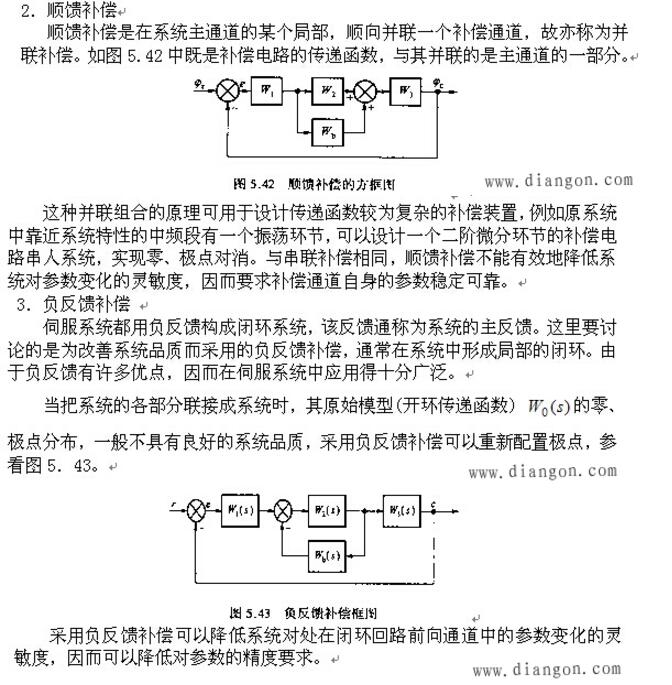
二、非线性补偿威廉希尔官方网站
仅依赖线性补偿威廉希尔官方网站 ,有时难以达到用户对伺服系统品质的要求,因而在伺服系统中采用非戋性补偿威廉希尔官方网站 、多模控制威廉希尔官方网站 日益增多。
延伸阅读:伺服系统常用的线性补偿
在伺服系统中常用具有线性特性的补偿装置(通常是补偿电路),采取串联、顺馈(或称并联)、负反馈、正反馈,以及它们的组合形式,来改善系统的特性,提高系统的工作品质。下面分别介绍各种补偿联接形式的特点及有关注意事项。
1、串联补偿
串联补偿是指在系统主通道(即前向通道)中串接人适当的补偿装置(电路)。如图所示。
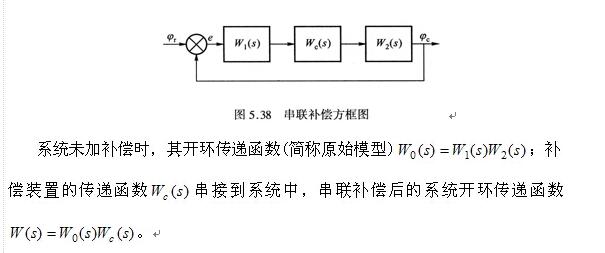
常用的串联补偿装置均由电路组成,有仅用R、L、C组成的无源补偿网络。有利用线性集成放大器组成的有源补偿网络,它们所能传递的都是直流信号,因此只有串联在系统线路中传递直流信号的部位,才能起到相应的作用。如果系统中传递的是固定频率的交流载频信号,则无法使用以上两类补偿网络。
常用的补偿网络,在工程上实用的还有许多形式。作为系统的串联补偿,它们中的一些是不能用的,因为在系统的主通道中,不能串联含有纯微分环节的电路(即不串联含有s=0的零点的网络),它将阻断恒定信号的有效传递,使伺服系统不能有效地工作。
为了提高系统的稳态精度,常采取提高系统的型(即无差度)的办法,这就要求在系统的前向主通道中串入积分环节,或者串联PI调节器。
倘若系统开环对数幅频特性(系统是最小相位系统)如图5.40a中曲线1所示。在零初始条件下,系统对输入阶跃信号的响应能满足动态品质要求,但系统的稳态精度不高;为提高系统稳态精度需增大系统开环增益,系统开环对数幅频特性如图a中曲线2所示,但此时系统的动态品质不满足要求。在增大系统开环增益的同时,串接一个滞后补偿
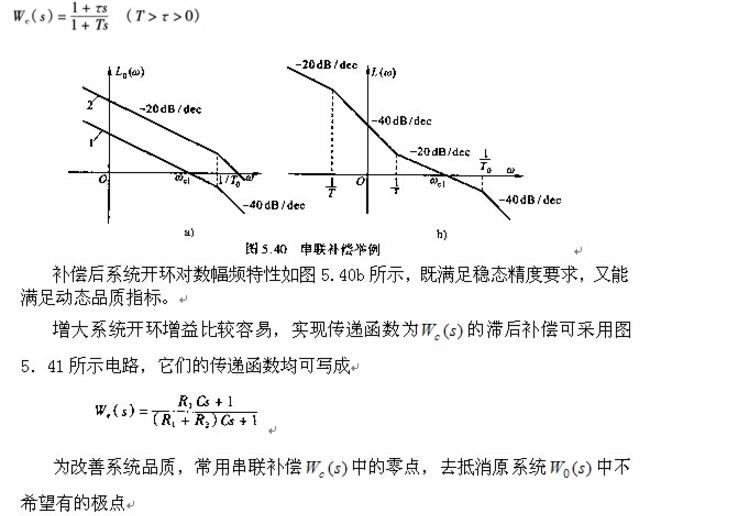
-
伺服系统
+关注
关注
14文章
572浏览量
39206
发布评论请先 登录
相关推荐
一种基于滑模控制和扰动补偿威廉希尔官方网站 的永磁同步电机伺服系统非线性速度控制算法
基于微粒子群算法的Anti-Windup伺服系统速度控制器优
电机智能化与精准控制伺服系统研究

伺服系统的线性补偿与伺服系统的测速测角

基于带修正因子模糊PID控制的PMSM交流伺服系统






 工商网监
工商网监
评论