 无人机避障威廉希尔官方网站
的发展以及其未来的研究态势
无人机避障威廉希尔官方网站
的发展以及其未来的研究态势
近年来,随着多旋翼消费级无人机市场的飞速增长,其相关威廉希尔官方网站 也正在发生日新月异的变革,以往多用于特种行业甚至军用产品上的威廉希尔官方网站 (如飞行控制、图像传输、目标识别和跟踪等)也越来越多地用于消费级无人机,使其越来越接近于自动化甚至智能化飞行机器人的概念。
在消费级无人机威廉希尔官方网站 的诸多趋势中,避障能力是实现自动化乃至智能化的关键环节,完善的自主避障系统将能够在很大程度上减少因操作失误造成的无人机损坏和伤及人身和建筑物的事故发生率,而从各消费级无人机厂商的新品和威廉希尔官方网站 发展方向看,避障威廉希尔官方网站 也将在未来几年趋于完善并成为中高端消费级无人机的标配系统。
避障威廉希尔官方网站 ,顾名思义就是无人机自主躲避障碍物的智能威廉希尔官方网站 。很多玩过无人机的小伙伴们都知道,有避障功能的无人机和没有避障功能的无人机,可以说体验是大不相同的!无人机自动避障系统能够及时地避开飞行路径中的障碍物,极大地减少因为操作失误而带来的各项损失。在减少炸机事故次数的同时,还能给无人机新手极大的帮助!
无人机避障威廉希尔官方网站 的发展阶段
根据目前无人机避障威廉希尔官方网站 的发展以及其未来的研究态势,无人机避障威廉希尔官方网站 可分为三个阶段,一是感知障碍物阶段;二是绕过障碍物阶段;三是场景建模和路径搜索阶段。这三个阶段其实是无人机避障威廉希尔官方网站 的作用过程。从无人机发现障碍物,到可以自动绕开障碍物,再达到自我规划路径的过程。
第一阶段,无人机只能是简单地感知障碍物。当无人机遇到障碍物时,能快速地识别,并且悬停下来,等待无人机驾驶者的下一步指令!
第二阶段,无人机能够获取障碍物的深度图象,并由此精确感知障碍物的具体轮廓,然后自主绕开障碍物!这个阶段是摆脱飞手操作,实现无人机自主驾驶的阶段!
第三阶段,无人机能够对飞行区域建立地图模型然后规划合理线路!这个地图不能仅仅是机械平面模型,而应该是一个能够实时更新的三维立体地图!这将是目前无人机避障威廉希尔官方网站 的最高阶段!
感知障碍物
在前避障时代,消费级无人机的使用说明上都会标明必须在开阔场地飞行,而且应当尽量避免周围有大量人群(当然,这也与当前威廉希尔官方网站 和市场环境使得消费级无人机产品的可靠性较差有很大关系),因为一不小心操作失误,或者在周围有高大障碍物时启动一键(低电压、失控)返航,则有可能眼睁睁看着无人机傻傻地撞向那么明显的障碍物,这是何等的回天乏力。为了降低这种事故的发生率,各厂商也都在卯足劲研发避障威廉希尔官方网站 ,而在实现方式上,大家的着眼点也都放在了一个方向——测量无人机到障碍物的距离。
我们可以很容易地想到,只要无人机能够测量出与潜在障碍物之间的距离,就可以在撞向障碍物之前停止前进(虽然固定翼无人机表示不同意),于是一场让人感觉回天乏力的事故被轻描淡写地避免了,这种思路简单粗暴,但还是有一定作用的。而当前运用较多的障碍物检测方法主要有:
超声波测距:这个方法很多人都熟悉,家用汽车的倒车雷达就是利用超声波检测障碍物,该方法的优点就是威廉希尔官方网站 成熟,成本很低;但缺点在于作用距离近(常用的中低端超声波传感器作用距离不超过10m),且对反射面有一定要求。因此超声波测距传感器常用来测量无人机与地面的距离(固定翼无人机表示自己飞的太高太快,超声波传感器用不上)。
红外/激光TOF:即飞行时间传感器,基本原理就是传感器发射一定频率的红外/激光信号,然后根据反射信号与原信号的相位差计算信号的飞行时间,即可换算出距离障碍物的距离。该方法威廉希尔官方网站 比较成熟,作用距离较超声波更远(数米到数百米),而且高等级的TOF传感器可以获得障碍物的深度图像(这一项能力在下文会有应用说明),但缺点在于成本高,抗干扰能力较差(激光TOF稍好)。因此该方案在当前市场上产品或样机中有一定规模的应用。
双目视觉:这个方法运用了人眼估计距离的原理,即同一个物体在两个镜头画面中的坐标稍有不同,经过转换即可得到障碍物的距离,双目视觉方法也可以获得障碍物的深度图像。这种方法的缺点在于威廉希尔官方网站 难度较高(不过自从有了OpenCV,妈妈再也不用担心我不会写机器视觉程序了),且距离估计的误差随距离变大而指数型增长,只是这一缺点在无人机避障应用中并无大碍。
电子地图:借助细粒度的数字高程地图和城市3D建筑地图,既能够实现避免重要建筑物受到无人机撞击(即禁飞区功能),也能够实现很多情况下的无人机避障。而事实上,战斧巡航导弹的远程飞行也在很大程度上依赖于数字高程地图。
障碍物测量的原理搞懂了,就可以开始讨论无人机避障了。最简单的策略莫过于遇到障碍物时停止前进,然后与障碍物保持一定的距离。这种遇到障碍物后就默默悬停等待,仿佛手足无措不知所往的初级策略,就是这么简单的开始,无人机就进入了避障时代。
绕过障碍物
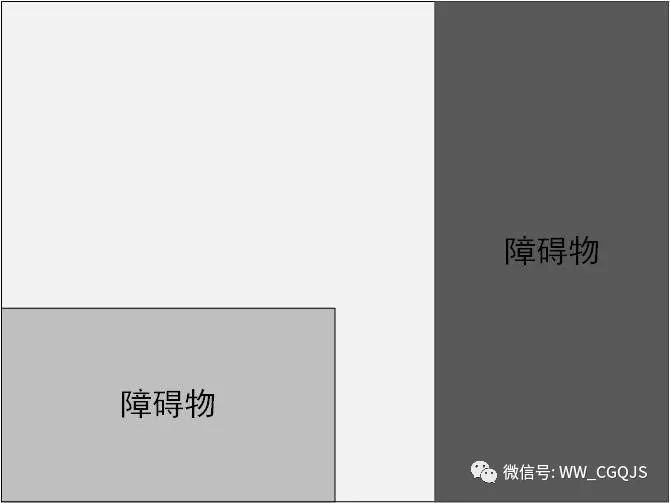
很显然,我们不会满足于让无人机遇到障碍物后傻傻等待(固定翼表示自己一秒钟也无法等待),这就需要设计让无人机安全高效地绕过障碍物继续完成预定飞行的策略。表面上看,连萨摩耶这种囧傻呆萌的狗狗都知道前面有座大楼时该怎么绕过去(请自行想象为什么说到狗狗时要强调前方是大楼,而不是一棵树),让无人机绕过障碍物的策略应该很简单了,但这其中的门道可多了去了。
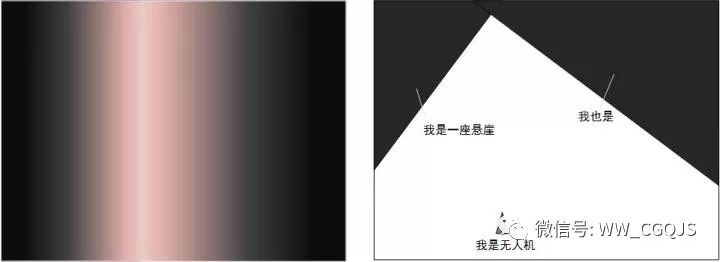
首先,狗狗很清楚前方大楼的轮廓,因此只需要往边缘走就可以绕过去,但是无人机想获得障碍物轮廓就很难了,如果避障传感器是普通超声波,无人机就只能知道前方有障碍,但是却无从知道障碍物的边缘,这就是前面为什么要强调“能够获得障碍物深度图像”了,对于能获得深度图像的TOF测距和双目视觉测距方式,只要障碍物没有充满视场,就总能够找到障碍物的边缘。举例说明,下图所示的是无人机的到的深度图像示意图,灰度越深,表明距离越近,遇到这种情况,很显然的策略就是往左上方飞,即朝向灰度最浅的区域飞行,此时问题仿佛已经得到解决。
但是别高兴太早,这种策略可以满足大多数应用场景,但是问题还远没有解决,看下面的左图,一架无人机刚绕从一座高大建筑旁绕过去,然后得到了如左图的障碍物深度图像,如果按照前面的策略,肯定是要往颜色最前的地方飞行,好那我要是告诉你其实右图是无人机和两座悬崖几何关系的俯视图,请你告诉我无人机会怎么飞,如果按照前述的策略,这又必将是一场刻骨铭心的事故。
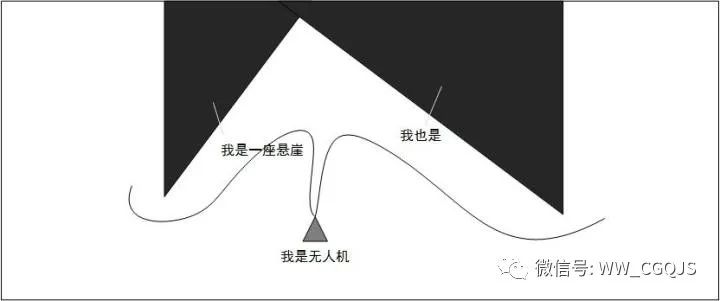
也许有人对windows98时代的迷宫屏保还有印象,屏保中,使用一直沿着左侧墙壁和一直沿着右侧墙壁都会最终走出迷宫,这是因为普通迷宫的拓扑结构就是两条平行线中间有一个通道,按照这种思路,无人机遇到下图这种简单策略躲不过去的障碍时,完全可以采取类似的方式,就一直向左或者向右寻找出路。即如果上面右图的局部场景的完整形态如果如下图所示的话,沿着图中的两条曲线为路径都可以绕过去,如果场景比下图更复杂,绕过去的路可就需要苦苦追寻了。
虽然关于机器人在未知场景中的避障方法研究非常多,但是由于终究是未知场景,其中必然有复杂的搜索过程。
场景建模和路径搜索
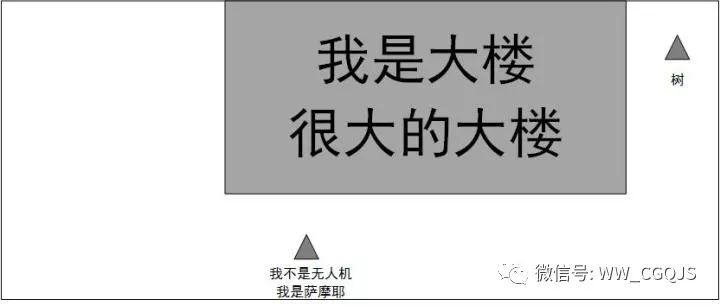
再回到狗狗绕过大楼的例子,看下图,如果狗狗左侧右侧的路都走过,而且右侧其实没有那棵树的话,很显然的它下一次绕过这座楼的时候基本上会选择左侧的路(但是当右侧有颗邪恶的树之后,结论仿佛有所改变),这是因为它大脑里已经有了一幅地图,即有了这个场景的模型。
无人机也是如此,无论是基于电子地图,还是其他来源,还是SLAM(即时定位与地图构建)获得了场景模型,就可以在机载计算机里用算法去搜索优化的避障路径。当前关于这种已知场景路径规划的研究很多,算法也是层出不穷(算法太多太复杂,本文暂不展开讨论),也是无人机避障发展的必然趋势。
与传统的机器人避障威廉希尔官方网站 研究相比,当前无人机的避障还处于很初级的阶段,但由于消费级无人机市场的火爆,大家也都在争先恐后地开展此类研究,可以预见,未来的避障时代中,将会有各自各样现在难以想到的方法用于无人机避障,有了这些威廉希尔官方网站 的辅助,无人机的操作也将越来越安全,越来越简单。
无人机避障威廉希尔官方网站 种类
红外避障
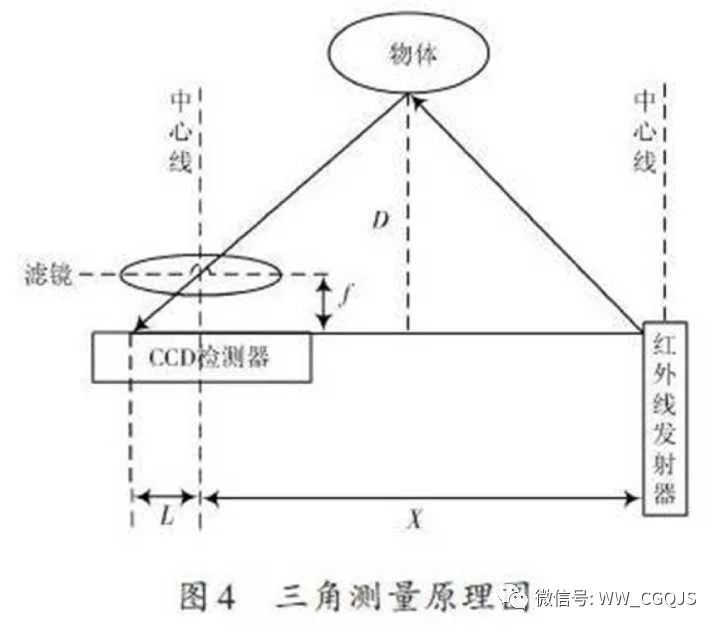
红外线的应用我们并不陌生:从电视、空调的遥控器,到酒店的自动门,都是利用的红外线的感应原理。而具体到无人机避障上的应用,红外线避障的常见实现方式就是“三角测量原理”。
红外感应器包含红外发射器与CCD检测器,红外线发射器会发射红外线,红外线在物体上会发生反射,反射的光线被CCD检测器接收之后,由于物体的距离D不同,反射角度也会不同,不同的反射角度会产生不同的偏移值L,知道了这些数据再经过计算,就能得出物体的距离了,如下图所示。
超声波避障
超声波其实就是声波的一种,因为频率高于20kHz,所以人耳听不见,并且指向性更强。
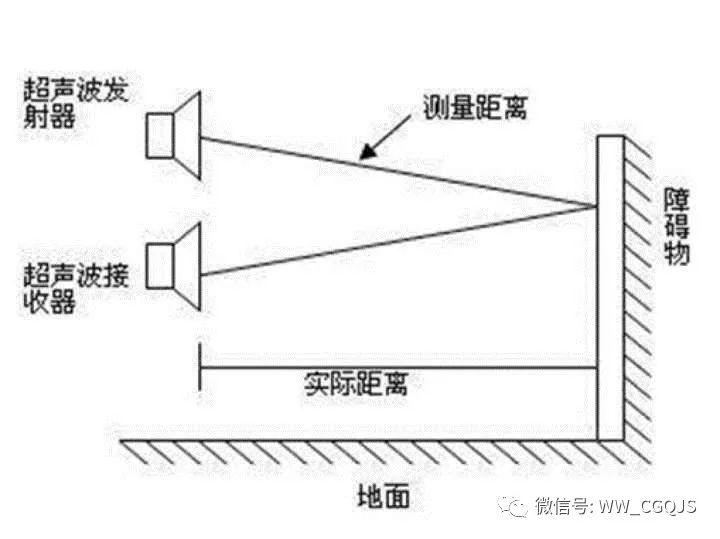
超声波测距的原理比红外线更加简单,因为声波遇到障碍物会反射,而声波的速度已知,所以只需要知道发射到接收的时间差,就能轻松计算出测量距离,再结合发射器和接收器的距离,就能算出障碍物的实际距离,如下图所示。
超声波测距相比红外测距,价格更加便宜,相应的感应速度和精度也逊色一些。同样,由于需要主动发射声波,所以对于太远的障碍物,精度也会随着声波的衰减而降低,此外,对于海绵等吸收声波的物体或者在大风干扰的情况下,超声波将无法工作。
激光避障
激光避障与红外线类似,也是发射激光然后接收。不过激光传感器的测量方式很多样,有类似红外的三角测量,也有类似于超声波的时间差+速度。
但无论是哪种方式,激光避障的精度、反馈速度、抗干扰能力和有效范围都要明显优于红外和超声波。
但这里注意,不管是超声波还是红外、亦或是这里的激光测距,都只是一维传感器,只能给出一个距离值,并不能完成对现实三维世界的感知。当然,由于激光的波束极窄,可以同时使用多束激光组成阵列雷达,近年来此威廉希尔官方网站 逐渐成熟,多用于自动驾驶车辆上,但由于其体积庞大,价格昂贵,故不太适用于无人机。
视觉避障
解决机器人如何“看”的问题,也就是大家常听到的计算机视觉(Computer Vision)。其基础在于如何能够从二维的图像中获取三维信息,从而了解我们身处的这个三维世界。
视觉识别系统通常来说可以包括一个或两个摄像头。单一的照片只具有二维信息,犹如2D电影,并无直接的空间感,只有靠我们自己依靠“物体遮挡、近大远小”等生活经验脑补。故单一的摄像头获取到的信息及其有限,并不能直接得到我们想要的效果(当然能够通过一些其他手段,辅助获取,但是此项还不成熟,并没有大规模验证)。类比到机器视觉中,单个摄像头的图片信息无法获取到场景中每个物体与镜头的距离关系,即缺少第三个维度。
如下图所示,单一的图片具有很强的迷惑性和不确定性
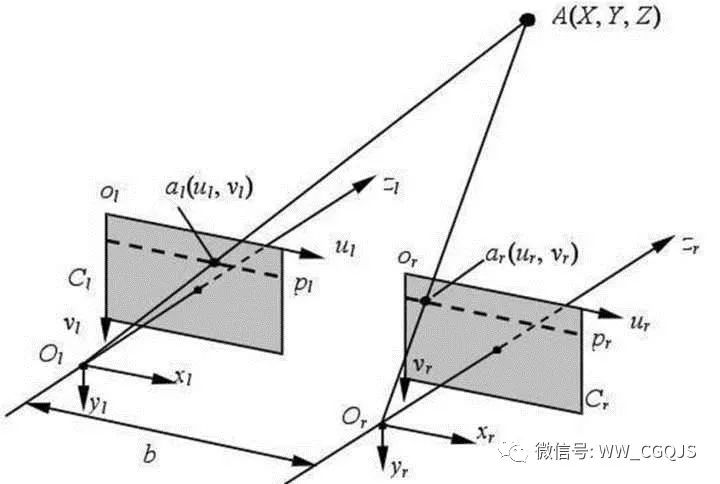
双目立体视觉犹如3D电影(左右眼看到的场景略有差异),能够直接给人带来强烈的空间临场感。类比机器视觉,从单个摄像头升级到两个摄像头,即立体视觉(Stereo Vision)能够直接提供第三个维度的信息,即景深(depth),能够更为简单的获取到三维信息。双目视觉最常见的例子就是我们的双眼:我们之所以能够准确的拿起面前的杯子、判断汽车的远近,都是因为双眼的双目立体视觉,而3D电影、VR眼镜的发明,也都是双目视觉的应用。
双目视觉的基本原理是利用两个平行的摄像头进行拍摄,然后根据两幅图像之间的差异(视差),利用一系列复杂的算法计算出特定点的距离,当数据足够时还能生成深度图。
其实,各个避障威廉希尔官方网站 在无人机上都有用武之地,只是应用场景有所不同,特别对于前视避障而言,有些威廉希尔官方网站 就不适用了。
红外和超声波威廉希尔官方网站 ,因为都需要主动发射光线、声波,所以对于反射的物体有要求,比如:红外线会被黑色物体吸收,会穿透透明物体,还会被其他红外线干扰;而超声波会被海绵等物体吸收,也容易被桨叶气流干扰。
而且,主动式测距还会产生两台机器相互干扰的问题。相比之下,虽然双目视觉也对光线有要求,但是对于反射物的要求要低很多,两台机器同时使用也不会互相干扰,普适性更强。
最重要的是,常见的红外和超声波目前都是单点测距,只能获得特定方向上的距离数据,而双目视觉可以在小体积、低功耗的前提下,获得眼前场景的比较高分辨率的深度图,这就让避障功能有了更多的发展空间,比如避障之后的智能飞行、路径规划等。
激光威廉希尔官方网站 虽然也能实现类似双目视觉的功能,但是受限于威廉希尔官方网站 发展,目前的激光元件普遍价格贵、体积大、功耗高,应用在消费级无人机上既不经济也不实用。
无人机避障实现的难点
避障功能从构思到实现,走的每一步几乎都便随着无数的难题。仅仅是写出有效的视觉识别或者地图重构的算法还只是第一步,能让它在无人机这样一个计算能力和功耗都有限制的平台上流畅稳定的跑起来,才是真正困难的地方。
此外,如何处理功能的边界也是一个问题,比如双目视觉在视线良好的情况下可以工作,那么当有灰尘遮挡的情况下呢?这就需要不断的实验和试错,并且持续的优化算法,保证各项功能在各类场景下都能正常工作,不会给出错误的指令。
避障功能作为近年来无人机产品的大趋势,带来的最直接的好处就是,以往一些人为疏忽造成的撞击,现在都能经由避障功能去避免,既保障了无人机飞行安全的同时,也避免了对周围人员财产的损害,让飞无人机的门槛进一步得到了降低。
而长远来看,无人机想要普及到农业、建筑、运输、媒体等领域,「智能化」肯定是必经之路。
毕竟只有在飞行功能上做到智能控制,才有余量去满足不同行业的需求。如今由“避障功能”而衍生出的一系列“智能飞行”功能,无疑就是“无人机智能化”的阶段性体现之一。
-
无人机
+关注
关注
230文章
10437浏览量
180382 -
避障威廉希尔官方网站
+关注
关注
0文章
7浏览量
4208
原文标题:无人机自动避障威廉希尔官方网站 盘点
文章出处:【微信号:WW_CGQJS,微信公众号:传感器威廉希尔官方网站 】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
盘点无人机避障威廉希尔官方网站 原理及厂商
限制无人机发展的因素有哪些
这个外国大叔用TFmini自制了这样一个无人机
毫米波雷达模块发展,无人机雷达避障威廉希尔官方网站 应用,雷达传感器方案
谈谈无人机夜间避障
什么是无人机避障威廉希尔官方网站 在消费级无人机领域为什么火不了?






 工商网监
工商网监
评论