 伺服电机与步进电机控制的区别详解
伺服电机与步进电机控制的区别详解
原理
步进电机作为控制用的特种电机,是将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的步进角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的,改变绕组的通电顺序,电机就会反转。

驱动器原理
步进电机需要使用专用的步进电机驱动器驱动,驱动器由脉冲发生控制单元、功率驱动单元、保护单元等组成。功率驱动单元将脉冲发生控制单元生成的脉冲放大,与步进电机直接耦合,属于步进电机与微控制器的功率接口。

控制指令单元,接收脉冲与方向信号,对应的脉冲发生控制单元对应生成一组相应相数的脉冲,经过功率驱动单元后送到步进电机,步进电机在对应方向上转过一个步距角。 驱动器的脉冲给定方式决定了步进电机运行方式,如下:
(1)m相单m拍运行
(2)m相双m拍运行
(3)m相单、双m拍运行
(4)细分驱动,需要驱动器给出不同幅值的驱动信号
步进电机有一些重要的威廉希尔官方网站 数据,如最大静转矩、起动频率、运行频率等。一般来说步距角越小,电机最大静转矩越大,则起动频率和运行频率越高,所以运行方式中强调了细分驱动威廉希尔官方网站 ,该方式提高了步进电机的转动力矩和分辨率,完全消除了电机的低频振荡。所以细分驱动器驱动性能优与其他类型驱动器。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
▌伺服电机
伺服电机原理
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类。
伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了闭环,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位。
在性能上比较,交流伺服电机要优于直流伺服电机,交流伺服电机采用正弦波控制,转矩脉动小,容量可以比较大。直流伺服电机采用梯形波控制,相对差一些。直流伺服电机中无刷伺服电机比有刷伺服电机要性能要好。
伺服电机驱动器
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
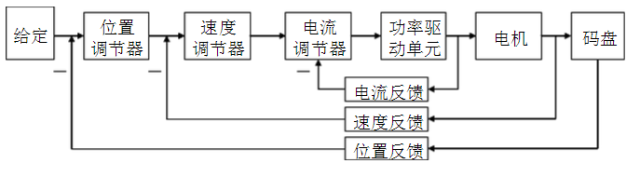
有刷直流伺服电机驱动器:电动机的工作原理和普通的直流电机完全相同,驱动器为三闭环结构,从内到外分别为电流环、速度环、位置环。电流环的输出控制电机的电枢电压,电流环的输入为速度环PID的输出,速度环的输入为位置环的PID输出,位置环的输入即是给定输入,控制原理图如上图。
无刷直流伺服电机驱动器:供电电源为直流,经过内部的三相逆变器逆变成U/V/W的交流电,供给电动机,驱动器同样采用三闭环控制结构(电流环、速度环、位置环),驱动控制原理同上。
交流伺服电机驱动器:大体可以划分为功能比较独立的功率板和控制板两个模块,控制板通过相应的算法输出PWM信号,作为驱动电路的驱动信号,来改逆变器的输出功率,以达到控制三相永磁式同步交流伺服电机的目的。
功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机,简单的说是AC-DC-AC的变流过程。
控制单元是整个交流伺服系统的核心,实现系统位置控制、速度控制、转矩和电流控制。
▌伺服电机与步进电机的性能比较
控制精度:步进电机的相数和拍数越多,它的精确度就越高,伺服电机取块于自带的编码器,编码器的刻度越多,精度就越高;
低频特性:步进电机在低速时易出现低频振动现象,当它工作在低速时一般采用阻尼威廉希尔官方网站 或细分威廉希尔官方网站 来克服低频振动现象,伺服电机运转非常平稳,即使在低速时也不会出现振动现象;
矩频特性:步进电机输出力矩随转速的升高而下降,高速时会急剧下降,伺服电机在额定转速内为恒力矩输出,在额定转速上为恒功率输出;
过载能力:步进电机不具备过载能力,伺服电机有较强的过载能力;
运行性能:步进电机的控制为开环控制,启动频率过高或负载过大易丢步或堵转的现象,停止时转速过高易出现过冲现象,交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠;
速度响应性能:步进电机从静止加速到工作转速需要上百毫秒,而交流伺服系统的加速性能较好,一般只需几毫秒,可用于要求快速启停的控制场合。
-
步进电机
+关注
关注
150文章
3109浏览量
147433 -
伺服电机
+关注
关注
85文章
2043浏览量
57794
原文标题:伺服和步进控制的区别详解
文章出处:【微信号:gk-plc,微信公众号:工控PLC网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐









 工商网监
工商网监
评论