 高性能六轴IMU,让姿态控制更精准
高性能六轴IMU,让姿态控制更精准
IMU能够测量载体的角速度和加速度,为载体提供关键数据。帮助实现姿态控制、导航、运动轨迹测量等多个功能。
我们有一款[六轴IMU] ER-MIMU-08内置陀螺仪与加速度计,在拥有高性能的同时对尺寸进行极致控制。非常适合无人机、机器人、机器狗以及机械臂。
极致尺寸
体积只有38.6x 44.8 x25.5mm,重量≤70g,紧凑、小型的设计,可以很方便地安装在载体上。
使用RS422总线通讯,波特率在230400 921600可设,工作温度为-40 +80℃满足大多数设备使用。
高性能传感器
陀螺仪测量范围为±400º/s,偏置不稳定性为1º/h,偏置稳定性为5º/h ;
加速度计测量范围为±30g,偏置稳定性<50ug,偏置重复性为100ug;
陀螺仪与加速度计提供角速度和加速度,这些数据通过计算可获得载体姿态、速度、位移等信息。
姿态控制
IMU提供的数据经解算后得出的姿态信息帮助载体进行平衡和稳定行走/飞行控制。还支持检测、响应外部冲击和干扰,特别是在不平坦或动态变化的环境中,这一功能显得尤为重要。
在人形机器人中,IMU数据被用于检测各个状态的角度偏移和平衡,特别是在机器人的躯干、关节、手部等部位。
定位导航
在执行复杂任务时,精确的定位和导航至关重要。[惯性测量单元]可以结合GPS等外部定位信息,通过算法融合实现更为准确、可靠的自主导航。使其能够自主执行复杂任务并与周围环境有效互动。
运动轨迹测量与跟踪
IMU 可以对载体的轨迹进行测量和跟踪,确保载体能够按照预定的轨迹行动,并在必要时进行调整以达成任务目标,实现精确的路径规划和轨迹控制。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
IMU
+关注
关注
6文章
311浏览量
45738 -
姿态控制
+关注
关注
0文章
10浏览量
7603
发布评论请先 登录
相关推荐
ICM-42670-P 高性能 6 轴 Motion跟踪® IMU : 官方推荐ICM-42670-P替代 MPU-6050
ICM-42670-P 高性能 6 轴 Motion跟踪® IMU *附件:ICM-42670-P 数据手册 替代MPU6050.pdf *附件:IMU PCB 设计和 MEMS 组装
探索未知,IMU助力精准导航
随着科技的持续进步,高性能MEMS IMU成为导航威廉希尔官方网站
领域的关键组件。其中,ER-MIMU-02Mini能实时提供物体的加速度与角速度数据,这些数据通过计算可获得载体的姿态、速度、位移等信息,满足多种高精度测量需求。
从姿态到飞行控制,IMU全方位守护无人机飞行
IMU为无人机提供关键飞行数据,可以帮助无人机实现姿态控制、导航、飞行控制等多个功能。提供的数据被飞控系统用于生成控制指令,在飞行中做出快速

嵌入式学习-飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景
六轴传感器主要适用于需要测量和监控物体在三维空间中的运动、速度、方向和姿态的场景。应用场景非常广泛,涵盖了许多不同的领域和行业。具体的应用包括但不限于:1.机器人控制:
发表于 12-02 09:47
飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景
六轴传感器主要适用于需要测量和监控物体在三维空间中的运动、速度、方向和姿态的场景。应用场景非常广泛,涵盖了许多不同的领域和行业。具体的应用包括但不限于:1.机器人控制:
发表于 11-29 08:57
爱普生M-G365PDC1/M-G365PDF1六轴陀螺仪
在快速发展的工业自动化、无人机导航、自动驾驶及精密机械控制等领域,高性能的惯性测量单元(IMU)扮演着至关重要的角色。作为新一代威廉希尔官方网站
IMU标准:爱普生M-G365PDC1/M-G365

《DNK210使用指南 -CanMV版 V1.0》第二十三章 六轴传感器——姿态解算实验
第二十三章 六轴传感器——姿态解算实验 在上一章节中,介绍了板载六轴传感器的使用,仅需简单的使用提供的驱动,便可从
发表于 10-18 14:10

爱普生开发用于姿态和振动控制的理想IMU
-M-G370PDS0改善了短期噪音,扩大了型号阵容,并提供了更广泛的产品选择-精工爱普生公司(“爱普生”,TSE:6724)已经开发并正在运送M-G370PDS0的样品,这是一种配备高性能六轴
发表于 08-12 11:15
•0次下载
意法半导体新款MEMS IMU LSM6DSV32X实现精确姿态识别应用
凭借3核、6轴传感架构,意法半导体新款MEMS IMU LSM6DSV32X能够进行卓越的边缘计算处理,是智能手机的高精度感测和3D地图、笔记本电脑和平板电脑的情境感知、AR和VR的精确姿态识别,以及可穿戴设备的全天候跟踪等应用
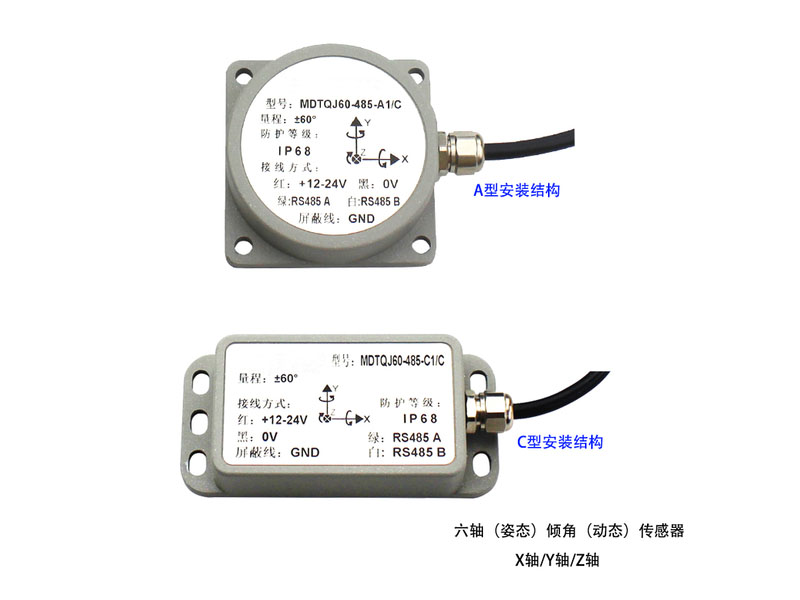
六轴姿态倾角动态传感器
六轴(姿态)倾角(动态)传感器内部使用数字型MEMS动态芯片,可测量运动载体的姿态参数(横滚、俯仰以及方位角),适用于运动或振动状态下的倾角测量。产品内置加速度和陀螺传感器,集成了卡尔
爱普生(EPSON)开发新IMU产品M-G370PDS改善姿态和震动控制
相应地,对提供更高精度的IMU的需求正在上升,这对于姿态控制和噪声性能至关重要。爱普生正是再这种对于高精度IMU的需求之下,开发新
爱普生为姿态和振动控制开发理想的IMU
-M-G370PDS0改善了短期噪声,扩展了型号阵容,使产品选择范围更广-精工爱普生公司(“爱普生”,TSE:6724)已经开发出M-G370PDS0样品,这是一种配备高性能六轴传感器的新型惯性测量






 工商网监
工商网监
评论