 中国人民解放军总医院:用于具有宽量程和超高灵敏度的柔性压力传感器的仿生纳米纤维-琼脂复合材料
中国人民解放军总医院:用于具有宽量程和超高灵敏度的柔性压力传感器的仿生纳米纤维-琼脂复合材料
研究背景
得益于人工智能威廉希尔官方网站 和柔性电子威廉希尔官方网站 的快速发展,近年来,类似皮肤的触觉传感器的研究取得了重大进展。这些传感器能够感知温度、应变、压力或各种外部刺激,已成为人机交互、智能传感和医疗保健领域不可或缺的工具。与人体皮肤类似,类似皮肤的感觉设备将外部压力刺激转化为电信号,然后通过电路进行收集和分析。基于电路的测量原理,皮肤状触觉传感器可分为电阻式、电容式、离子式、压电和摩擦电传感器。尽管在开发具有各种仿生结构的触觉传感器方面取得了重大进展,如突触、皱纹、绒毛和纤维网络,但开发检测阈值低、灵敏度高、响应范围宽的类皮肤传感设备仍面临严峻的挑战。
文章概述
中国人民解放军总医院李春宝团队受人体皮肤的触觉传感机制和分层结构的启发,利用静电纺丝和液滴注入的方法,设计出一种具有内部分级刚度特性和表面半嵌入式微结构的纳米纤维-离子凝胶(NFIG)复合材料。该凝胶interwetten与威廉的赔率体系 了人体皮肤的分层纳米纤维结构及其离子感应机制,由注入高弹性聚偏二氟乙烯-六氟丙烯(PVDF-HFP)纳米纤维的离子凝胶组成。这项研究探讨了杨氏模量和外部压力对单位电容的影响,并建立了一个纤维-凝胶复合模型,以评估纤维如何影响传感器的性能,包括离子通量、位移和电动势的变化。基于以上研究,设计出了NFIG传感器,它具有超高灵敏度(>10,000kPa-1)、宽压力范围(∼1000kPa)和超强稳定性(超过5000次循环)。此外,该传感器用途广泛,可用于各种人体监测环境、阵列配置,甚至滑板监测。
图文导读
1. 传感器设计
受皮肤柔性弹性纳米纤维结构的启发,引入了高弹性纳米纤维,并成功构建了具有半嵌入式微结构和内部梯度刚度的NFIG传感器。使用NFIG构建的传感器具有独特的三明治结构,上下两层均为织物电极。中间层是NFIG,可分为三部分:纳米纤维、纳米纤维凝胶和离子凝胶。这三个部分各司其职,为NFIG传感器提供所需的卓越性能。首先,NFIG表面具有纳米纤维纹理,类似于人体皮肤外部的纹理,可对外界变化保持敏感;其次,NFIG内部分散排列的纳米纤维凝胶类似于皮肤中的胶原纤维,可增强强度和稳定性,抵御外部压力带来的变形;最后,底部的离子凝胶为整个传感器提供了一个柔软的基底,可承受较大的压力。
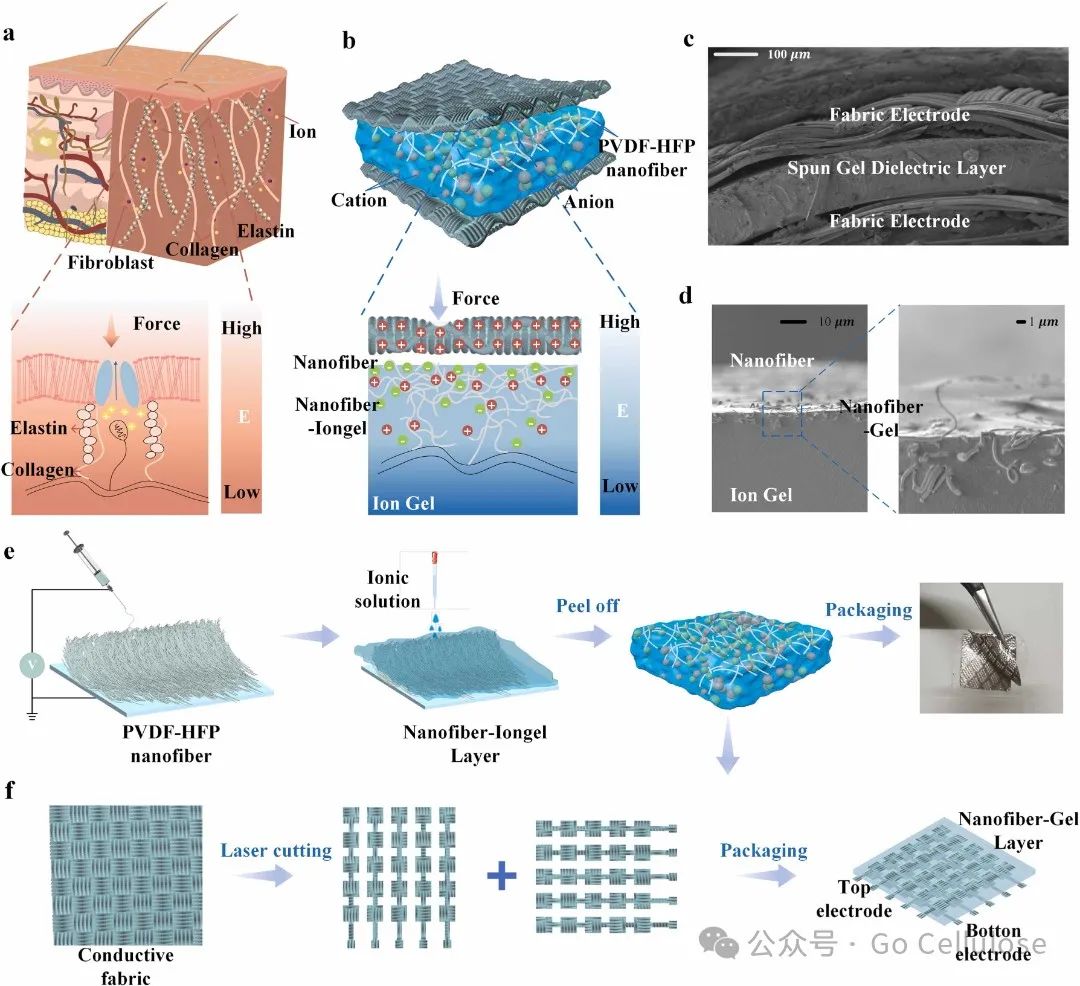
图1 皮肤启发式NFIG传感器简介。(a)人体皮肤结构示意图;(b)NFIG传感器的仿皮肤设计示意图;(c)NFIG传感器的扫描电子显微镜横截面;(d)NFIG表面显微照片;(e)单个传感器的制备;(f)55个阵列传感器的制备流程。
2.传感器机理分析
离子凝胶是由聚乙烯醇形成的大分子,自由阴离子和阳离子。由于电极表面电压的存在,在界面与离子凝胶之间的德拜长度(亥姆霍兹层)内形成电容器,分别记为CH1和CH2。中间层还有一个电容器,记为CD。因此,该传感器的整体电容值是CH1与CH2的串联组合,然后与CD并联。当施加压力时,离子凝胶中的阴离子和阳离子被加速,导致上下电极之间的电容发生变化,从而实现传感。当离子凝胶中存在PVDF-HFP纤维时,表面存在表面微结构,内部存在高弹性纳米纤维网络,形成具有梯度刚度的NFIG。首先,表面微结构的存在导致初始接触面积减小,从而降低了CH1。其次,高弹性PVDF-HFP纤维的引入不仅有助于抵抗外部压力导致的离子凝胶明显变形,而且还加速了离子迁移。因此,PVDF-HFP纤维从三个方面改善了离子凝胶的特性,显著提高了NFIG传感器的传感性能。
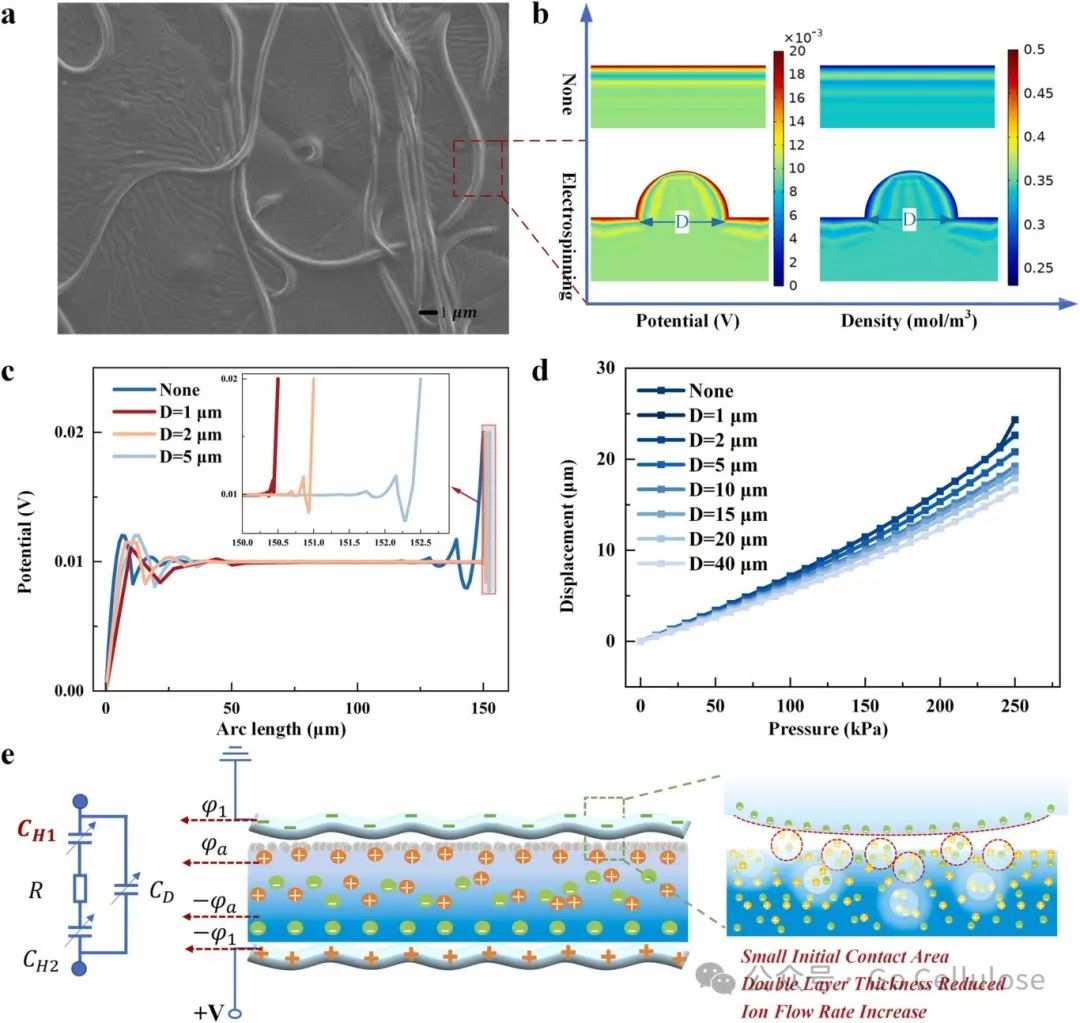
图2 不同模型的模拟和NFIG传感原理。(a)NFIG的扫描电镜;(b)有纳米纤维结构和无纳米纤维结构模型的电势和密度的热图比较;(c)不同纤维直径模型的电势分布和(d)应力位移的模拟数据曲线;(e)NFIG传感器的原理示意图。
3.传感器性能
离子凝胶中的PVDF-HFP纳米纤维类似于人体皮肤。这增强了凝胶的抗压强度和弹性,同时还在凝胶表面产生微突起,从而提高了传感器的性能。在0–1kPa范围内,传感器的平均灵敏度为10159.69kPa−1。在1–100kPa范围内,灵敏度为2328.9kPa−1,当压力增加到1000kPa时,灵敏度降低到226.52kPa−1。在10kPa至100kPa压力循环期间的相对电容变化结果显示,随着施加压力的增加,相对电容稳步增加。当没有压力时,相对电容很快恢复到初始状态,表明所制造的电容器件能够准确感应外部压力,并表现出优异的传感特性。此外,将10克的重物快速放在设备表面,放置一段时间,然后取下,测量响应时间。结果显示,传感器的响应时间和恢复时间分别约为120ms和80ms,这确保了传感器的快速响应。
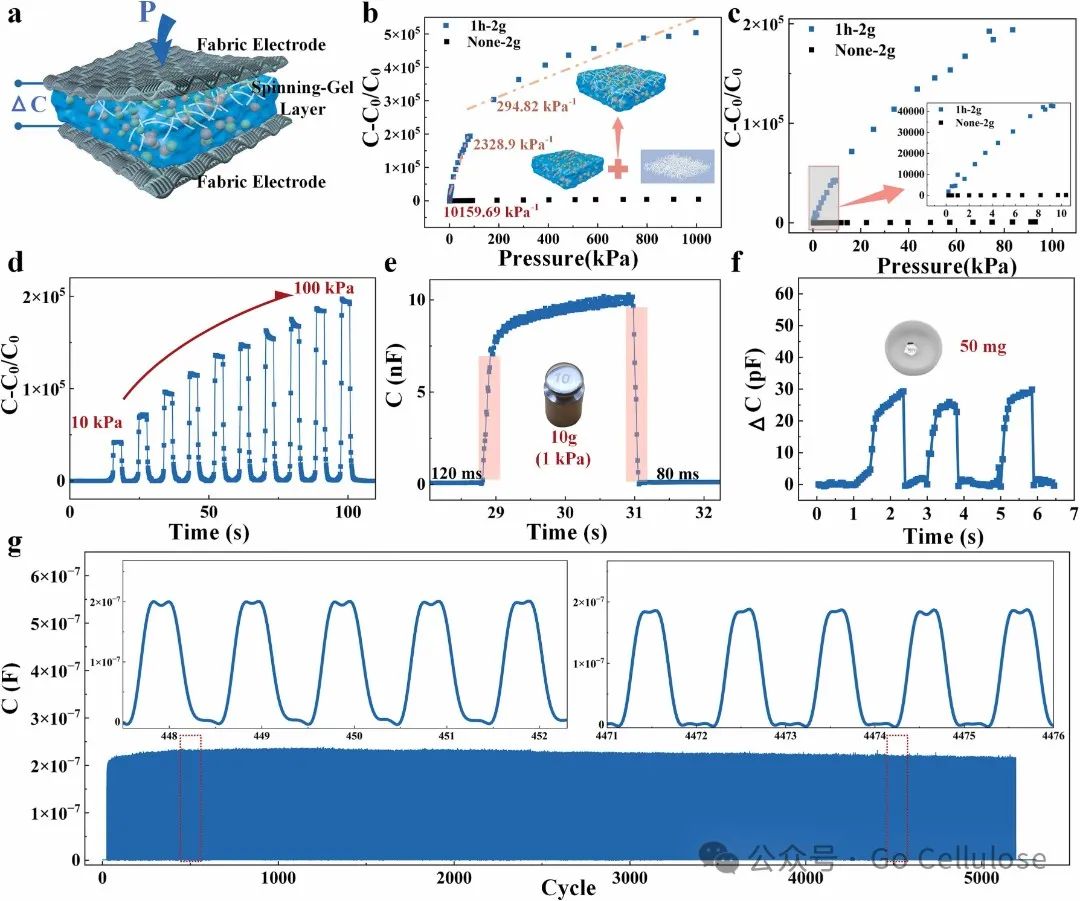
图3 NFIG 传感器的传感性能。(a)传感器的测量原理、响应曲线以及1h-2g传感器在(b)0-1000kPa、(c)0-100kPa下的线性拟合结果。(d)传感器在不同压力(10kPa至100kPa)下的电容响应。(e)传感器的响应时间。(f)传感器的检测极限。(g)传感器在100kPa下5000次循环的稳定性。
4.传感器应用演示
为了评估NFIG传感器在可穿戴人体应用中的有效性,通过将传感器策略性地放置在身体的不同部位,能够准确地观察和记录一系列运动信号,包括面部表情、脉冲和手部关节运动。传感器可以精确跟踪脉搏、面部表情和吞咽最细微变化。这证明了传感器捕捉复杂细节的能力,从而能够对身体的反应进行彻底的分析。为了模拟人体皮肤的特性,创造了一种基于激光的阵列电极,以及可以分布在大面积上的NFIG传感器。这些类似于皮肤的大面积阵列电容传感器可以部署在不同的空间位置,具有各种表面拓扑和曲率,从而能够估计物体的大小、重量和不规则物体的力点。
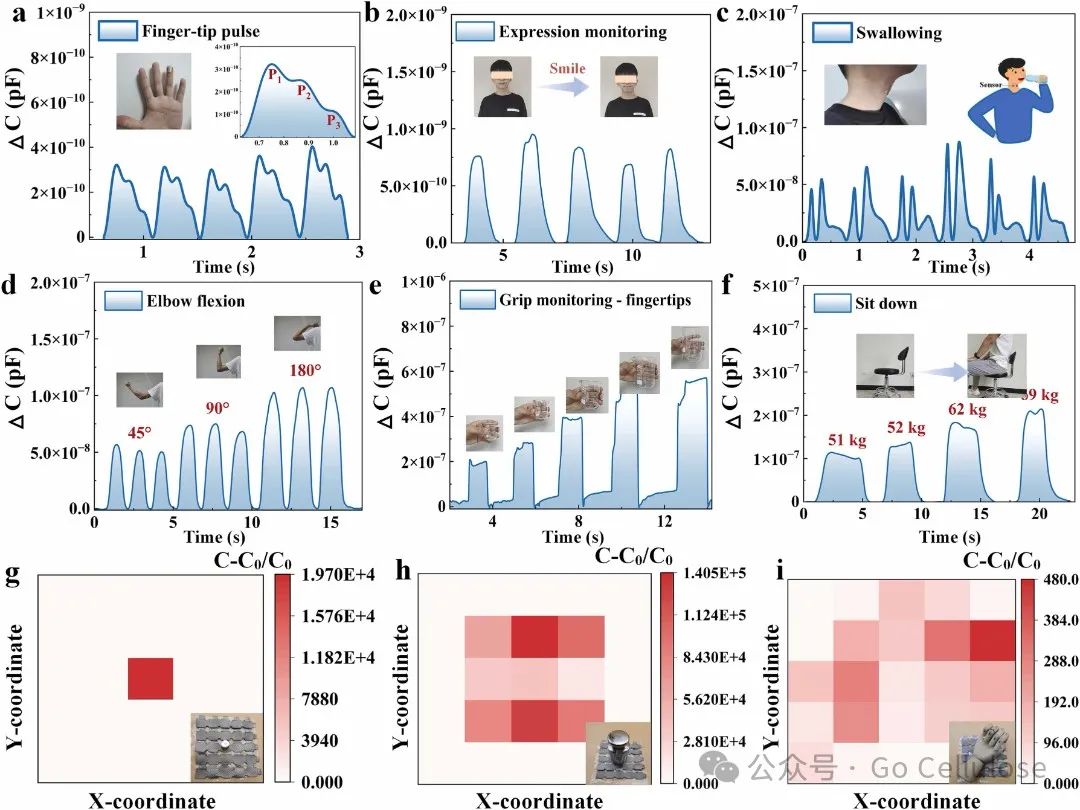
图4 用于人体信号监测和阵列应用的梯度硬度传感器。传感器用于(a)人体脉搏测试、(b)面部表情测试、(c)吞咽喉咙测试、(d)肘关节弯曲角度测试、(e)握力运动测试、(f)体重变化测试;5×5传感器阵列用于(g)单点重量(20克)测试、(h)大质量重量(500克)测试和(i)不规则物体(手部模型)测试。
该NFIG传感器还可以应用于滑板运动检测。放置在滑板锚上的8个传感器、硬件电路、电池、滑板和一台主机共同组成滑板运动检测系统。主机记录不同滑板动作的运动数据,形成数据集,并利用深度学习最终识别滑板动作。记录了常规、左转、右转等动作,每个动作45组数据,共计180组数据。并使用一维卷积深度算法,结合SoftMax,通过使用数据集的四分之三作为训练集,其余数据集作为测试集,对动作进行分类。对算法进行分类测试,平均准确率为95.45%。该传感器具有传感范围宽、灵敏度高的特点,在运动检测和运动辅助判断方面具有潜在的应用前景。
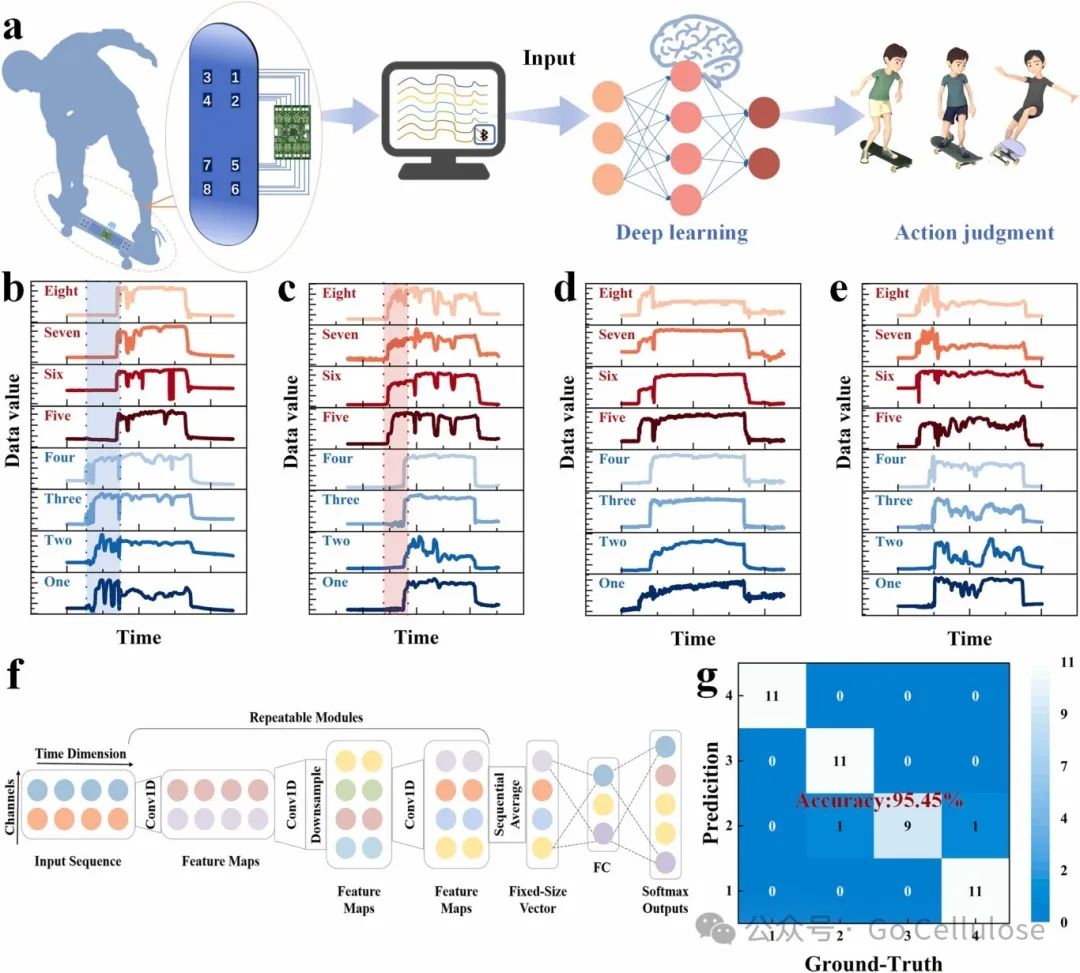
图5 用于滑板运动监测应用的NFIG传感器。(a)滑板运动检测流程;不同滑板运动的数据图:(b)常规,(c)蒙戈脚,(d)左转,(e)右转;(f)卷积神经网络(CNN)流程图;以及(g)滑板识别分类测试混淆矩阵。
结论
本研究模仿人体皮肤的层状纳米纤维结构和富含离子的成分,成功研制出纳米纤维离子凝胶(NFIG)。静电纺丝制备的高模量PVDF-HFP纳米纤维与离子凝胶的结合不仅在NFIG复合材料表面构建了半嵌入式微结构,而且纳米纤维网络的存在提高了离子凝胶的离子迁移和变形能力,同时不影响凝胶的抗压能力。利用 NFIG设计出了一种性能优异的柔性电容传感器。该传感器具有超高灵敏度(>10000kPa-1)、宽压力范围(∼1000kPa)、低检测限(5Pa)、快速响应时间(120ms)、快速恢复时间(80ms)和出色的稳定性(∼5000次循环)。在提高传感性能的同时,它还保持了基底的灵活性,是各种人体监测应用、阵列应用甚至运动跟踪的理想选择。
https://doi.org/10.1016/j.nanoen.2023.109140
来源: Go Cellulose
声明:转载此文是出于传递更多信息之目的,若有来源标注措误或侵犯了您的合法权益,请与我们联系,我们将及时更正、删除,谢谢。
-
压力传感器
+关注
关注
35文章
2212浏览量
163386 -
纳米纤维
+关注
关注
0文章
18浏览量
8615 -
触觉传感器
+关注
关注
4文章
85浏览量
9339
发布评论请先 登录
相关推荐
中国人民大学OpenHarmony威廉希尔官方网站 俱乐部正式揭牌成立

气体压力传感器的种类和特点 气体压力传感器在环保监测中的应用
华中科技大学:研究通过裂纹调制电通路实现超高灵敏度和宽范围的柔性应变传感器
线性传感器的灵敏度是什么是多少
力敏传感器的灵敏度单位是什么
中国科学院大学:实现可再生高灵敏度生物传感器新进展


中国人民银行研究局副局长张雪春率队调研鸿利智汇
南京牧镭激光用激光雷达感知风速风向,一煤矿故意封堵传感器 ,3人被刑拘
如何选择压力传感器量程?如何选择压力传感器接头?

柔性PZT复合薄膜压力传感器的研究进展综述

基于人体皮肤热感知原理的超高灵敏度柔性温度传感器开发

苏州清研微视立体视觉传感器项目落户安徽芜湖,2024年上海市重大工程清单公布

压力传感器型号及参数 压力传感器分类及用途
单向碳纤维强化的柔性压电纳米复合材料的原理、结构设计及应用





 工商网监
工商网监
评论