 1 美元的雷达运动传感器内部是怎样的?
1 美元的雷达运动传感器内部是怎样的?
“最近买了一些便宜的 RCWL-0516 微波运动传感器,让我们看看几块钱的雷达运动传感器内部是怎么样的。”
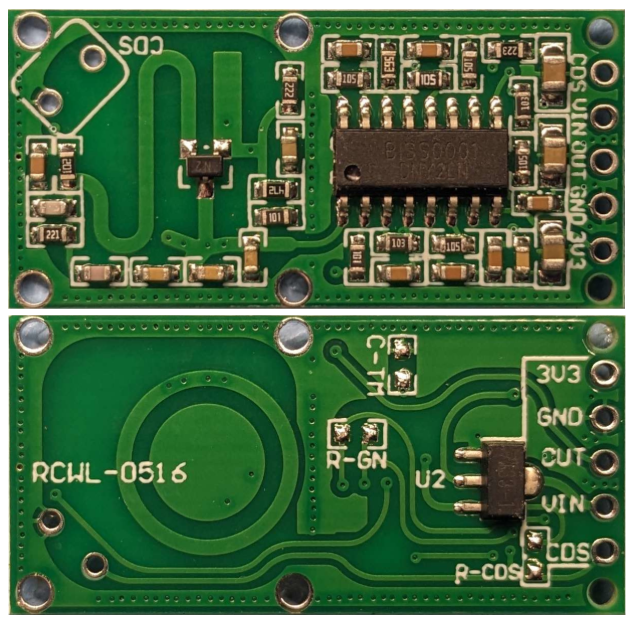
我只需将 VIN 引脚连接到 5 伏电压,将 GND 连接到地,并在 3V3 引脚上添加一个 1 uF 的去耦电容,就能让它正常工作。当有人在 ~5 米范围内移动时,OUT 引脚会升至 3 伏,持续 3 秒钟。 显然它能工作,但它如何工作呢?
我先找到了核心的 SOIC-16 芯片的数据手册。原来 BISS0001 是一款红外运动传感器芯片。它是如何工作的?
一般来说,运动和速度感应(多普勒)雷达的工作原理是发送连续载波,然后将接收到的信号与发射的载波混合,形成低频的 IF 信号。如果反射信号来自移动的物体,接收到的信号会与发射的信号慢慢发生相位漂移,产生几个赫兹的拍频(beat frequency)。由于运动传感器并不关心确切的速度,因此芯片所要做的就是寻找毫伏级的变化:所有的复杂工作都已经完成。
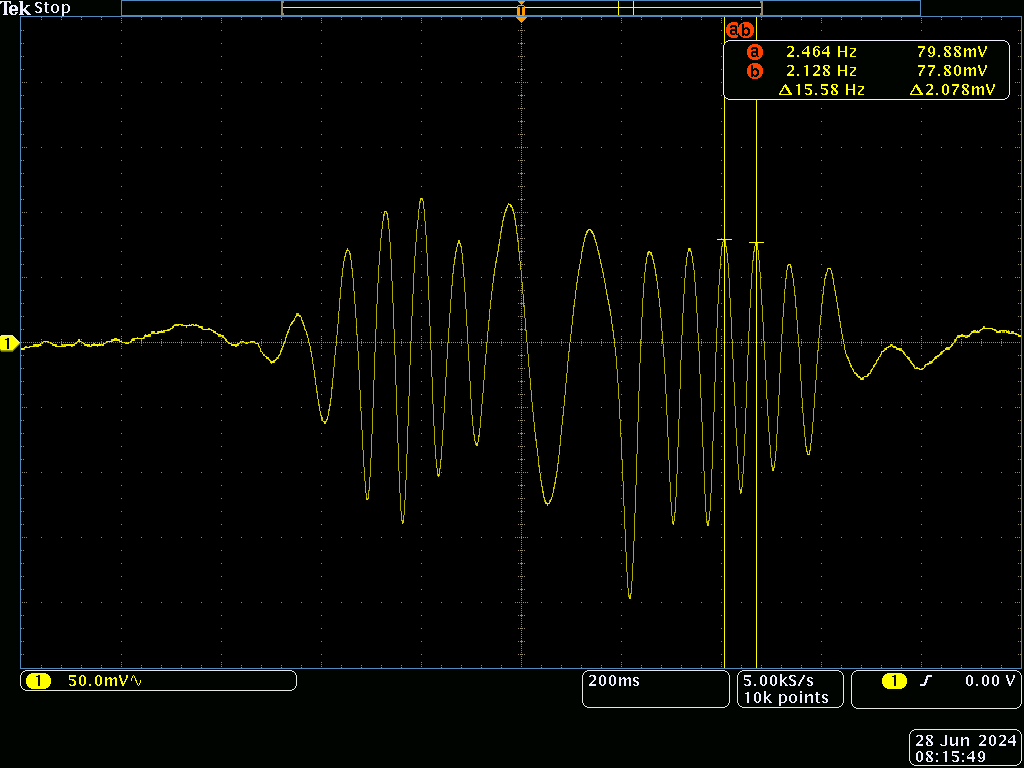
在这个模块中,IF 信号通过第 14 引脚进入芯片,但芯片通过第 16 引脚输出经过放大的副本,这对示波器更为友好:
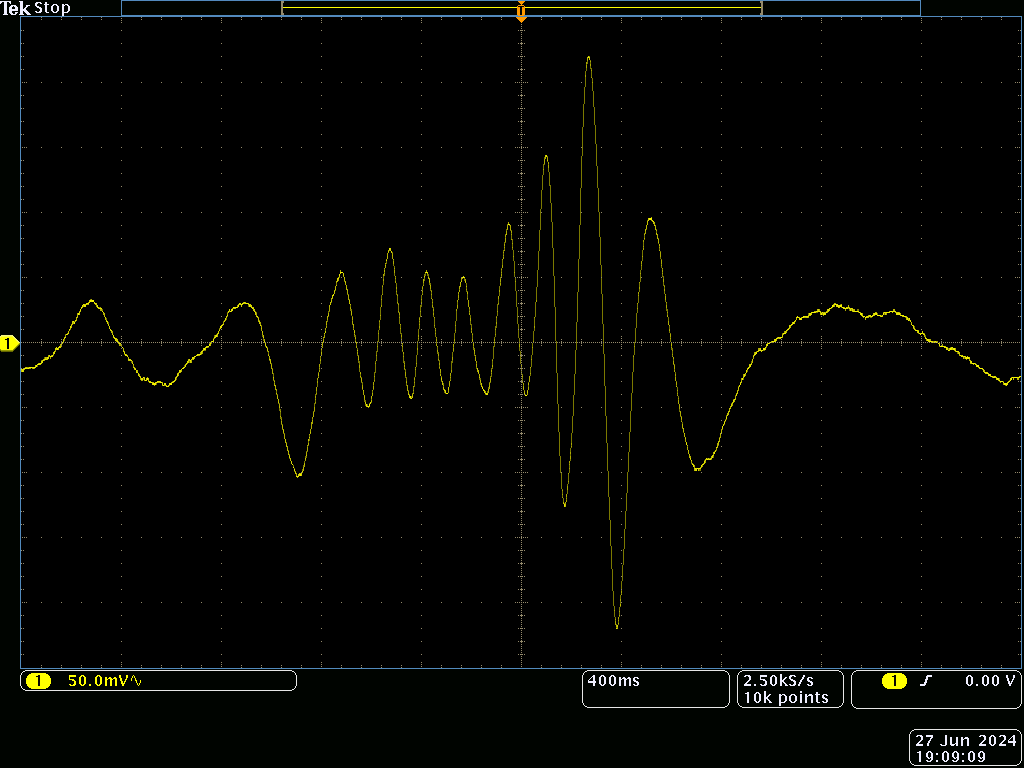
在轨迹的中间,是我将一台笔记本电脑向传感器方向移动了约 40 厘米。但传感器不仅捕捉到了笔记本电脑移动时的信号,还捕捉到了我伸手去停止示波器时产生的一些较慢的水平变化。这条轨迹足以让我们弄清雷达使用的频率:当笔记本电脑移动时,有 8 个峰值,这意味着往返路径长度变化了 8 个波长。如果8个波长覆盖了80厘米的距离,那么每个波长大约是10厘米,与实际波长 9.4 厘米相差不大。
那么神奇的地方在哪里呢?
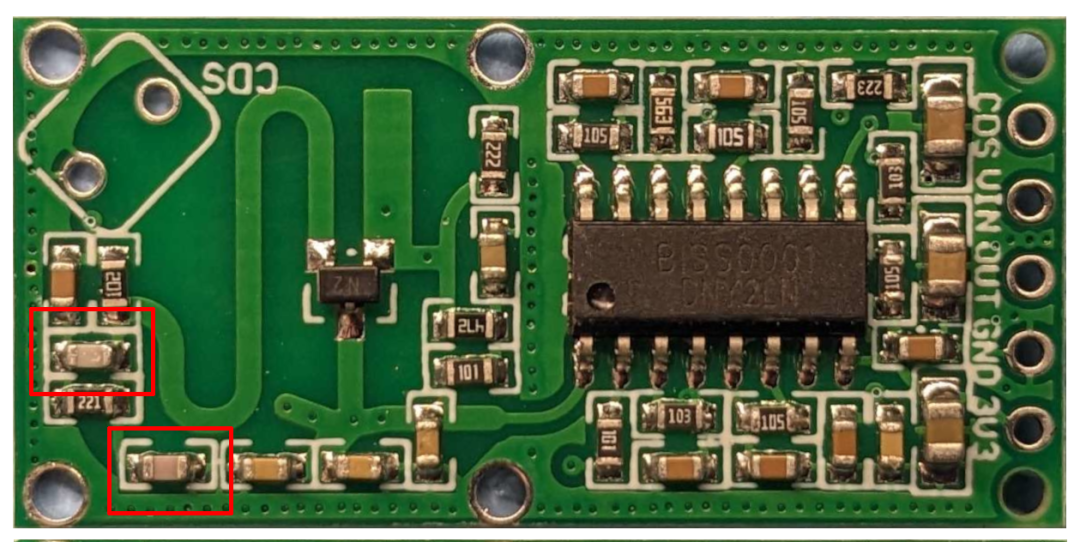
整个电路板的右侧只是 BISS0001,它充当了放大器、比较器和定时器的角色。所有的射频功能都在电路板的左侧,只使用了少量元件:
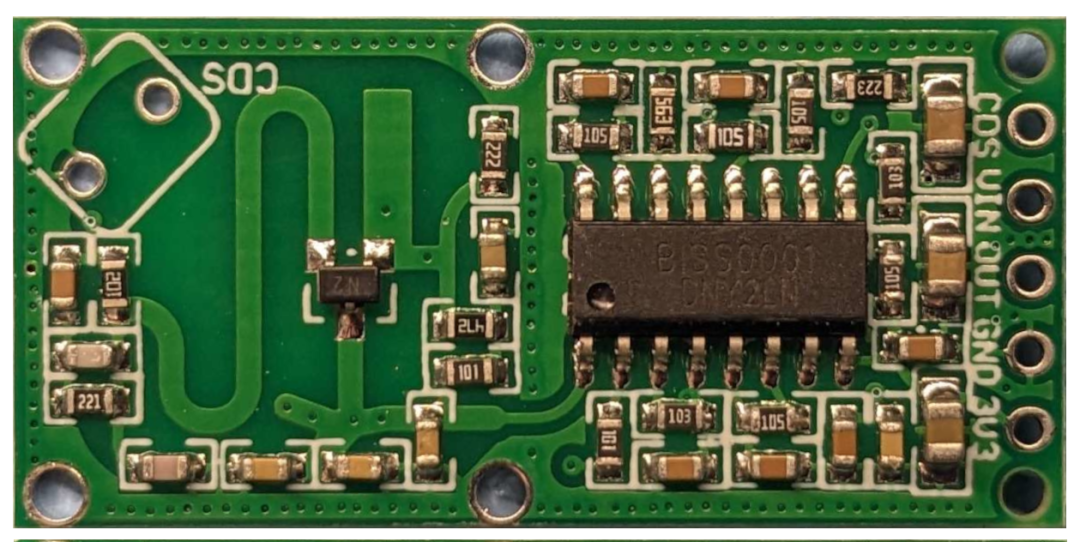
乍一看,这只是一个工作频率为 3.18 千兆赫的单晶体管振荡器:
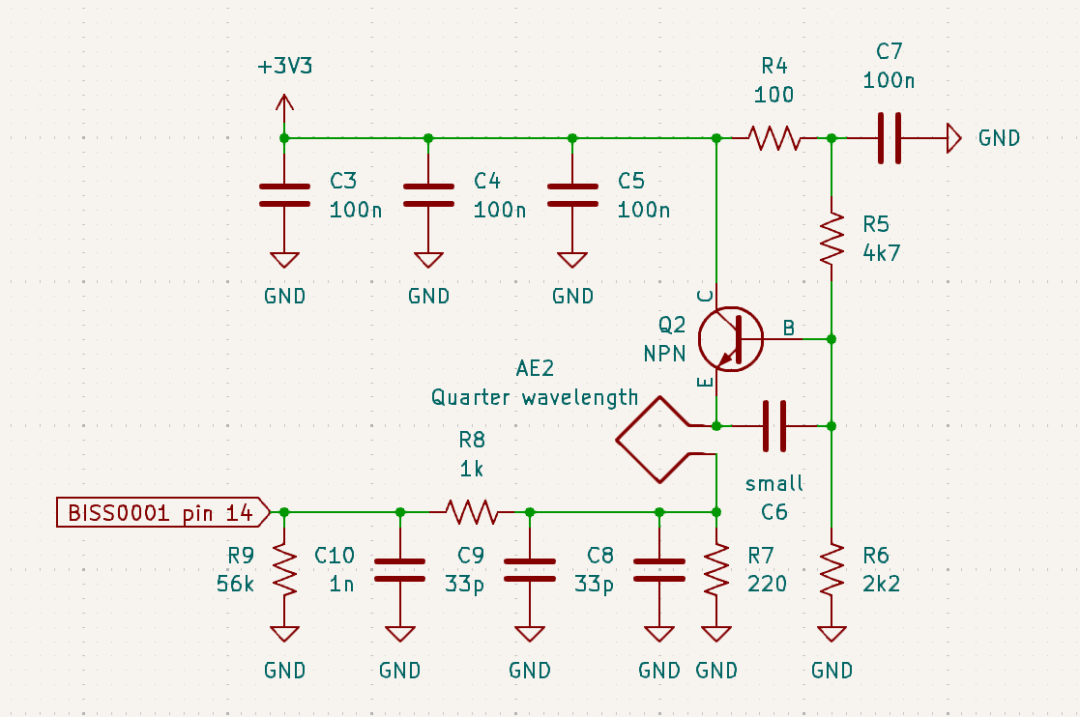
发射器上的 S 形走线是一个微波谐振器,也是一个天线,由 BJT 晶体管驱动,谐振器和平行铜导线形成的电容提供反馈,以维持振荡。我怀疑背面的环形结构只是为了防止其他频率的振荡,许多非常类似的传感器都没有这样的结构,或者仅仅使用一个实心的地平面。振荡器相当不稳定,会因为手的电容和偏置漂移而漂移几兆赫。这可能是为什么模块对电源噪声非常敏感的原因。 虽然看起来是一个振荡器,但实际上它是两个振荡器的结合。微波振荡以 20 MHz 左右的频率脉冲,在发射器上产生这种波形:
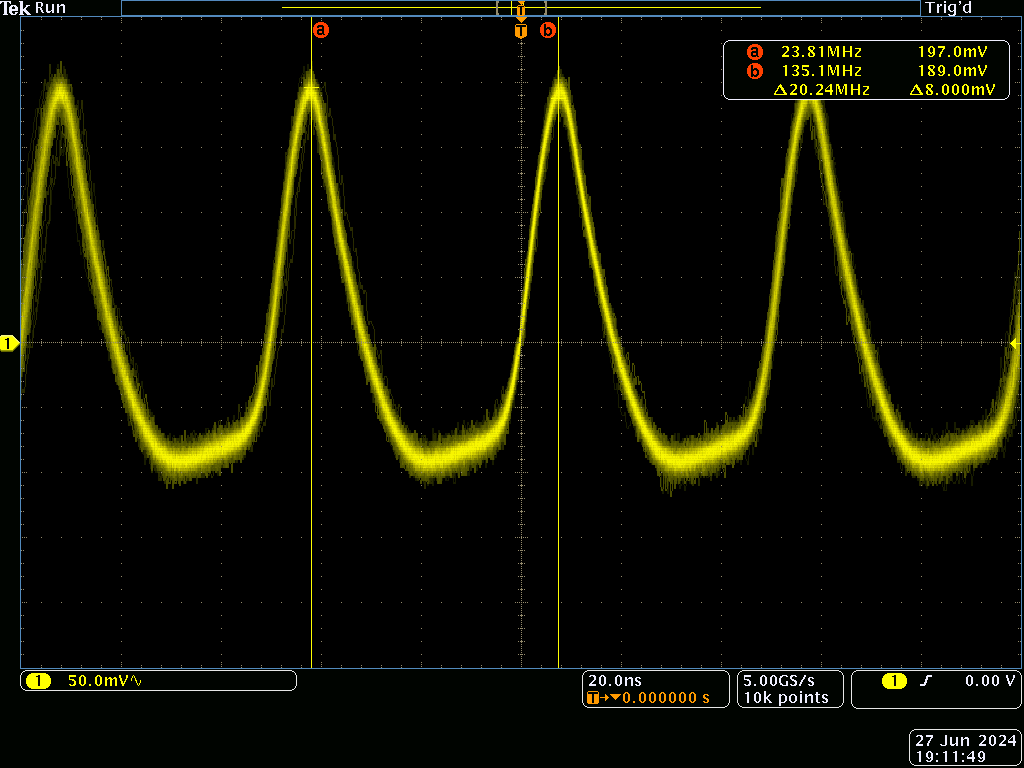
示波器无法直接观测到3 GHz的信号,但这个信号在波形的下降部分之外是存在的。 发生的情况是,当振荡器运行时,它会改变 33 pF 的电容,使发射极电压升高,直到振荡器无法再运行。此时,220 欧姆电阻会对电容放电,从而在几纳秒内重新启动振荡。 这种脉冲使它能作为超级再生接收器工作。一旦晶体管的增益超过 1,振荡器不会立即启动,它需要一个微小的激励开始工作。谐振器中的任何信号都会被反复放大,直到大到足以给电容充电并重新开始循环。由于振幅呈指数增长,即使微小的射频信号也会增加脉冲频率,从而将振荡器变成一个灵敏的接收器。(这就是为什么振荡器启动时无需等待太长时间,噪声会迅速被放大,直至使晶体管放大器崩溃)。 等等,如果它是在振荡器启动时接收,然后再发射,那它怎么能看到移动物体的相位变化呢? 由于关闭时间约为 15 纳秒,任何来自 2.5 米以外静态物体的回波都会在振荡器启动期间到达。这些静态回波充当雷达的本地振荡器,超再生接收器从静态和移动回波的干扰中检测调幅信号。在有大量反射的室内环境中,总会有一些射频反弹,触达移动的物体,无论它们离得多近。
这种 “自以为是” 的雷达方法可能就是传感器性能非常不稳定的原因;在室内,它工作得非常好,测距可达 5 米,但在室外,如果没有静态回波,它往往根本无法工作。
有点意思,S 波段发射机:
我尝试的第一项改装是移除导致 20 Mz 脉冲的电容:
这就把它变成了一个发射器,只要在振荡器的任何地方施加信号,就能对它进行频率调制。此外,通过周期性地开启和关闭电源,可以控制这个发射器的开关。
即使没有脉冲和超级再生部分,雷达仍然可以工作,只是 IF 信号要弱得多,大大降低了灵敏度。原因是振荡器本身充当了一个混频器,将接收到的信号降频,但是这个过程中没有增益。没有增益意味着信号不会被放大,因此雷达的灵敏度会因为信号弱而降低。
双基地雷达:
那么我们能否将其用于更传统的雷达设置中呢?我试着把另一个未修改的模块作为接收器放在发射器旁边,结果得到了更稳定的回波信号:
将笔记本电脑移向雷达和远离雷达时,奇怪的振幅变化消失了,从我相对缓慢移动的手发出的回波信号要弱得多,这也是多普勒雷达的预期效果。另一方面,由于接收器不断受到来自发射器的射频干扰,远处的返回信号也更弱。它作为运动传感器的功能也较差,因为它需要有明显的移动才能触发,而不像通常情况下,几乎任何东西都能触发它。 另一方面,通过运行 FFT 或简单地检测 IF(芯片的 14/16 引脚)上的零交叉,它可以很好地用作速度传感器。计算方法非常简单,只需将波长乘以拍频(beat frequency),再除以 2 即可得出速度。例如,示波器轨迹中的最高拍频为 15 Hz,因此速度为 0.7 米/秒: 9.4 cm * 15 Hz/ 2 = 70 cm/s=0.7 米/秒
如果两个模块相隔1到2米,户外性能比单独使用一个模块要好得多,两个模块之间的区域具有最佳的灵敏度。虽然性能仍然不是非常好,但比单独模块在户外几乎无法工作要好得多。
原文转载自: https://10maurycy10.github.io/projects/motion_sensor_hacking/ 遵循 Creative Commons Attribution-ShareAlike 4.0 International License.
-
雷达
+关注
关注
50文章
2930浏览量
117465 -
运动传感器
+关注
关注
9文章
164浏览量
30765
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论