 不可思议的转换术!:Modbus TCP转Ethernet IP网关与HCS最佳搭档
不可思议的转换术!:Modbus TCP转Ethernet IP网关与HCS最佳搭档
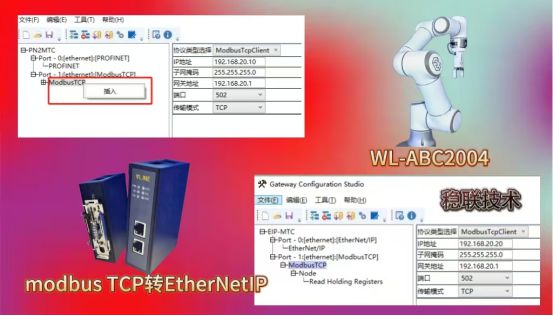
以下是稳联威廉希尔官方网站 ModbusTCP转EtherNETIP网关(WL-ABC2004)连接艾利特ELITE机器人模块的一般应用步骤:准备工作确认设备与软件:确保拥有艾利特ELITE机器人模块,且其支持ModbusTCP通信功能。同时准备好相应的ModbusTCP转EtherNETIP网关设备,并在与机器人模块处于同一网络的计算机上安装好网关配置软件以及相关的编程软件.网络配置:配置艾利特ELITE机器人模块的网络参数,如IP地址、子网掩码、网关等,使其能够在局域网内正常通信。例如,将机器人模块的IP地址设置为192.168.1.20,子网掩码设置为255.255.255.0。

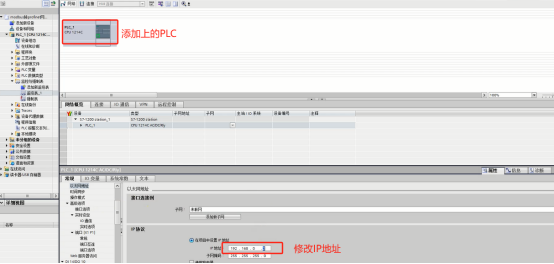
网关配置,添加稳联威廉希尔官方网站 ModbusTCP转EtherNETIP网关(WL-ABC2004)网关到PLC组态:打开PLC编程软件,如罗克韦尔的RSLogix5000等,进入硬件组态界面,添加稳联威廉希尔官方网站 EtherNETIP转ModbusTCP网关(WL-ABC2004)的电子描述文件(EDS文件),以便PLC能够正确识别和配置网关设备。设置网关参数:在组态软件中找到添加的网关模块,双击进入参数设置界面。设置网关的设备名称、IP地址等参数,如将网关的IP地址设置为192.168.1.30,并根据实际需求设置数据的输入输出字节长度,如设置为16个字节。下载配置到PLC:完成网关参数设置后,将配置下载到PLC中,使PLC能够与网关进行正常通信。
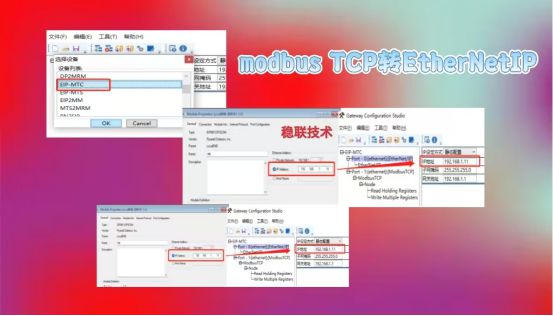
机器人模块配置建立连接:通过网关配置软件,建立与稳联威廉希尔官方网站 EtherNETIP转ModbusTCP网关(WL-ABC2004)的连接,以便进行后续的参数配置和数据交互.配置通信参数:在网关配置软件中,选择相应的机器人模块作为从站设备,并配置其通信参数,包括IP地址、端口号、从站地址等。确保这些参数与机器人模块的实际设置一致,例如端口号设置为502,从站地址设置为,映射数据地址:根据机器人模块的寄存器地址映射表,将需要读取或写入的数据地址映射到网关的相应内存区域。例如,将机器人模块的状态寄存器地址40001映射到网关的输入寄存器区的起始地址0,将控制命令寄存器地址40010映射到网关的输出寄存器区的起始地址10等。
数据交互测试编写PLC程序:在PLC编程软件中编写相应的程序,通过稳联威廉希尔官方网站 ModbusTCP转EtherNETIP网关(WL-ABC2004)网关读取机器人模块的状态数据,并根据需要向机器人模块发送控制命令。例如,编写程序读取机器人模块的关节角度数据,并在PLC中进行数据处理和显示,同时根据工艺要求向机器人模块发送运动控制命令.监控与调试:运行PLC程序和机器人模块,通过监控工具观察数据的交互情况,检查数据是否正确传输和处理。如果发现数据传输错误或通信异常,可以通过调试工具检查网关配置、网络连接、机器人模块设置等方面的问题,并及时进行调整和修复.
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28380浏览量
206918 -
MODBUS
+关注
关注
28文章
1799浏览量
76954 -
网关
+关注
关注
9文章
4444浏览量
51057 -
HCS
+关注
关注
0文章
12浏览量
14445 -
Ethernet IP
+关注
关注
0文章
16浏览量
5536
发布评论请先 登录
相关推荐
捷米特EtherNet/IP转MODBUS网关将变频器接入EtherNet/IP
EtherNet/IP 转 Modbus 协议网关

EtherNet/IP主站转Modbus-TCP协议网关

EtherNet/IP转Modbus-RTU协议转换网关
EtherNet/IP主站转Modbus-TCP协议转化网关
EtherNet/IP转Modbus-TCP协议转换网关
EtherNet/IP转Modbus-TCP协议网关(EtherNet/IP转Modbus-TCP)

EtherNet/IP转Modbus-RTU主站网关(EtherNet/IP转Modbus-RTU)
EtherNet/IP转Modbus-TCP协议网关(JM-EIP-TCP)
EtherNet/IP转Modbus-TCP协议网关模块的配置与应用详解

Modbus转Ethernet IP网关模块与汇川PLC通讯案例

Modbus转Ethernet/IP网关模块与汇川PLC通讯在网关配置软件中的配置







 工商网监
工商网监
评论