 一文详解Xilinx高速收发器Serdes
一文详解Xilinx高速收发器Serdes
一、为什么要用Serdes
传统的源同步传输,时钟和数据分离。在速率比较低时(《1000M),没有问题。

在速率越来越高时,这样会有问题

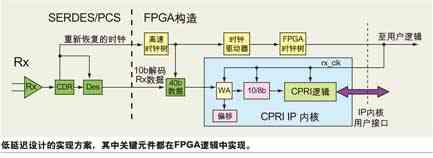
由于传输线的时延不一致和抖动存在,接收端不能正确的采样数据,对不准眼图中点。然后就想到了从数据里面恢复出时钟去采样数据,即CDR
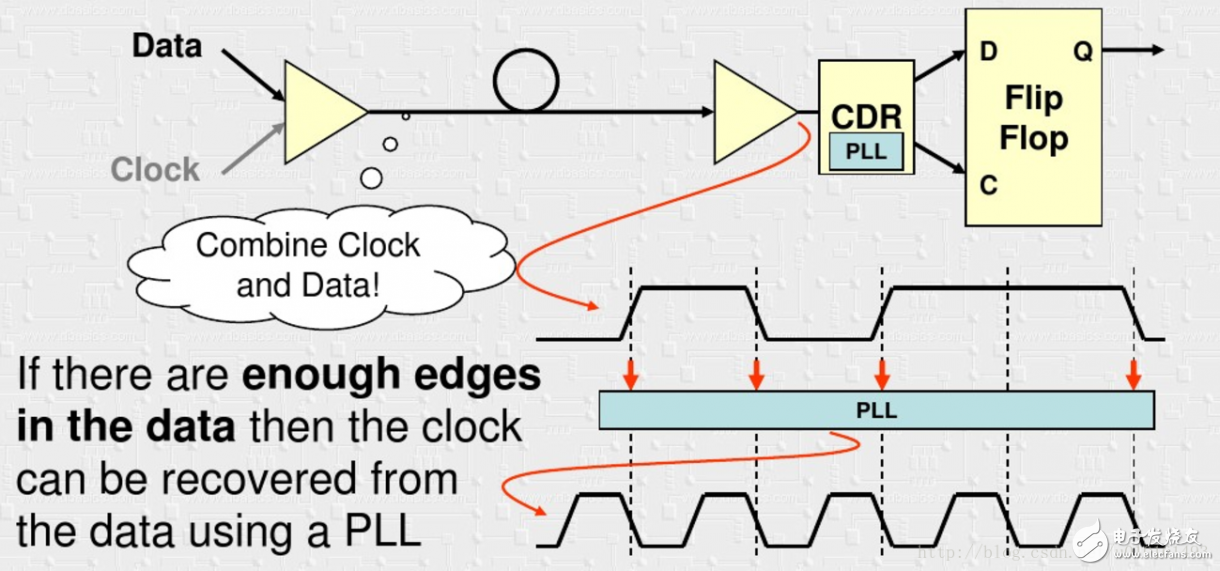
这样就不存在延迟不一致的情况,有轻微的抖动也不会影响采样(恢复的时钟会随着数据一起抖动)。
二 、为什么要用8b10b,64b66b?
1 提供足够的跳变来恢复时钟
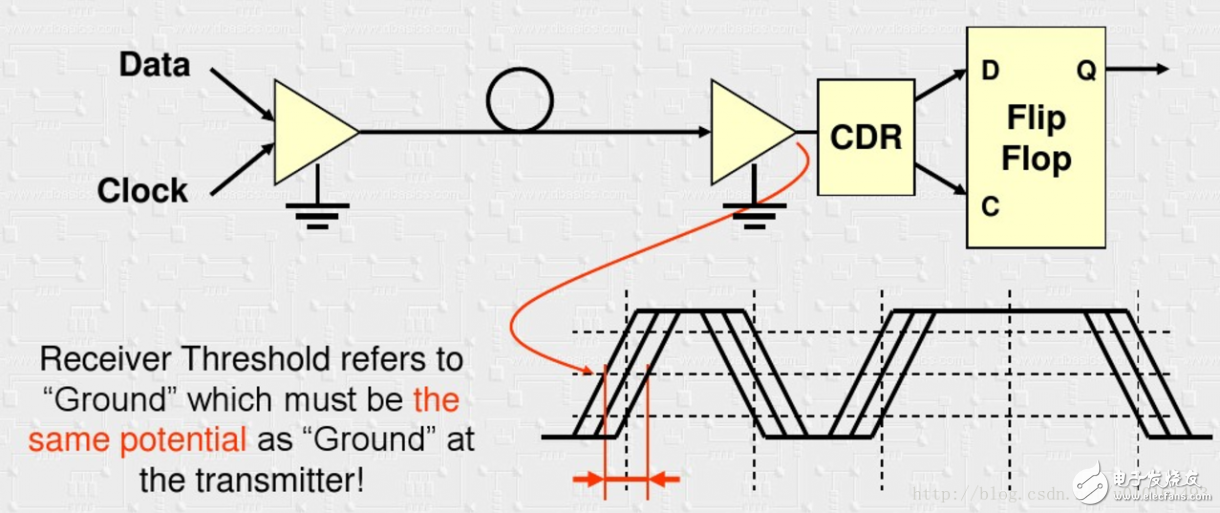
这样还有问题,收发两端必须共地,但往往很难实现。
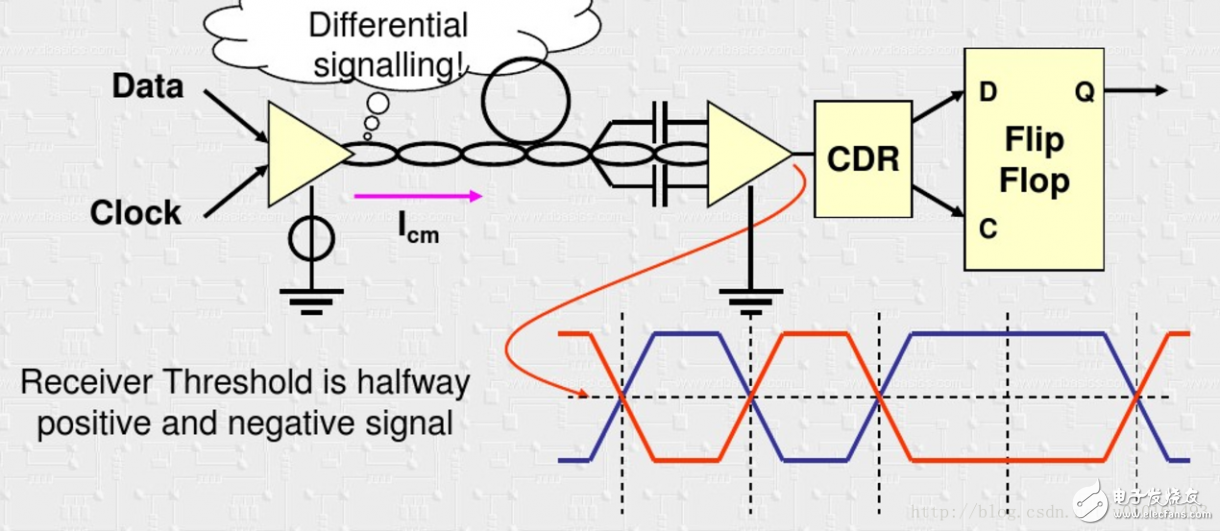
于是采样差分信号传输,为了防止共模电压在接收端导致电流过大,使用电流驱动模式。看到接收端有电容进行交流耦合,隔直流。这样又带来一个问题,需要DC平衡。所以有了下面另一个原因。
2 DC平衡,即0和1的数量要相等。
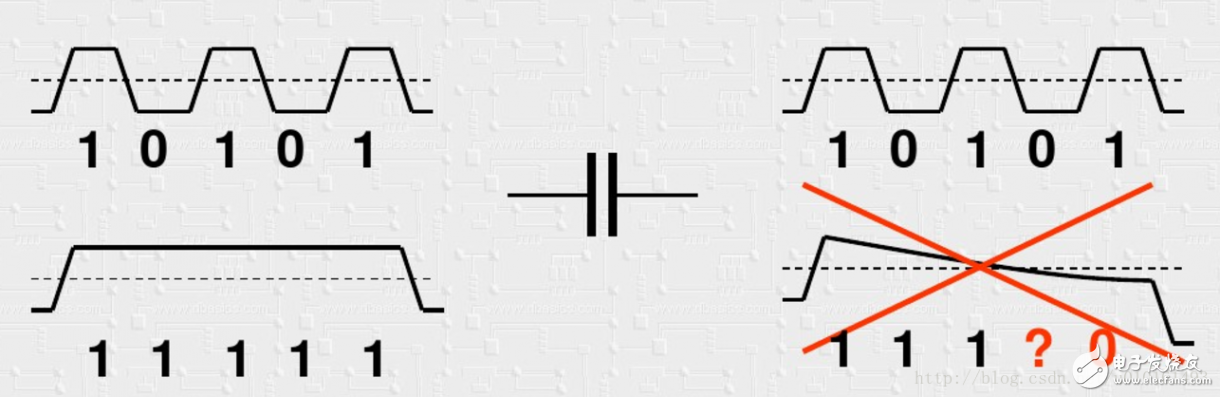
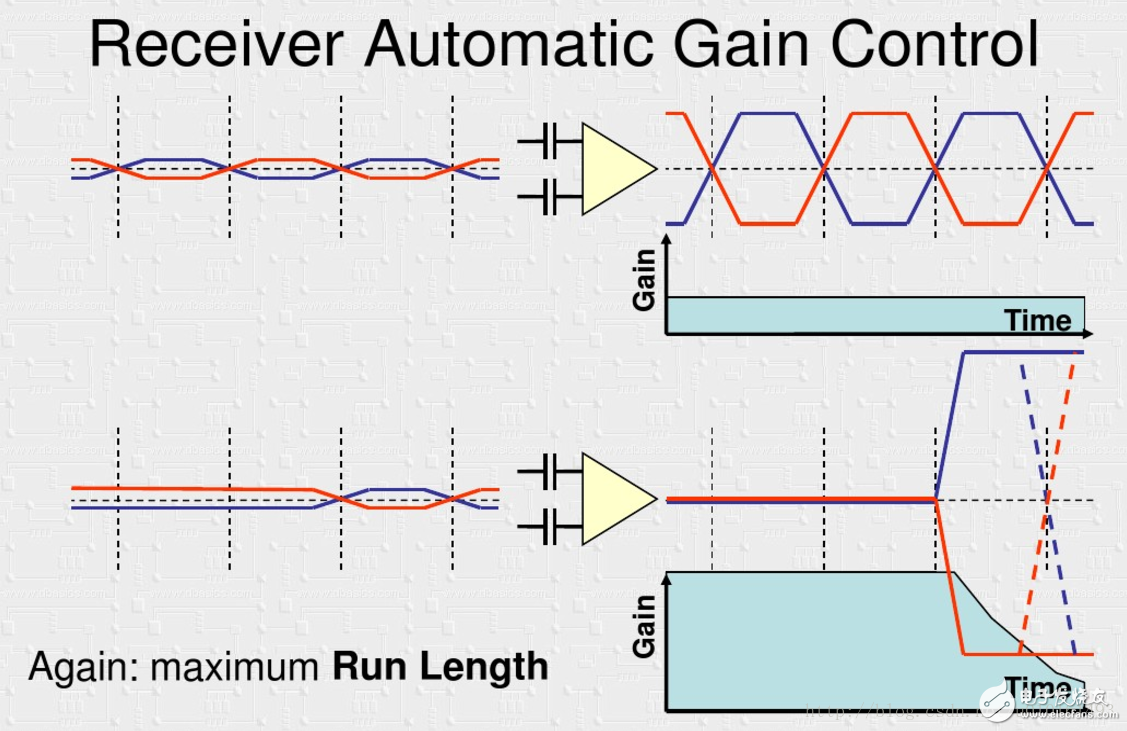
3 run length,0和1连续出现的最大长度
AGC自动增益控制需要交流分量才能实现放大
4 comma码,K码
在serdes上面的高速串行流在接收端需要重新串并转化成多字并行,怎么找到字的边界进行对齐呢?
这就需要一个特殊的序列,这就是comma码。
传输过程中需要的一些控制,最好不要和数据冲突了,这就是K码。
基于以上四个原因,就有了8b10b,64b66b的出现。
三 、8b10b编码
8b10b编码一句话概括起来就是把8bit的数据变成10bit的数据,其中所有1或0的个数不会超过6个,并且连续的1或0的个数不会超过4个。这样原本1024的汉明空间编码后就大大减小了。其中有256个data码和12K码控制码。这样数据和控制码不会重合。
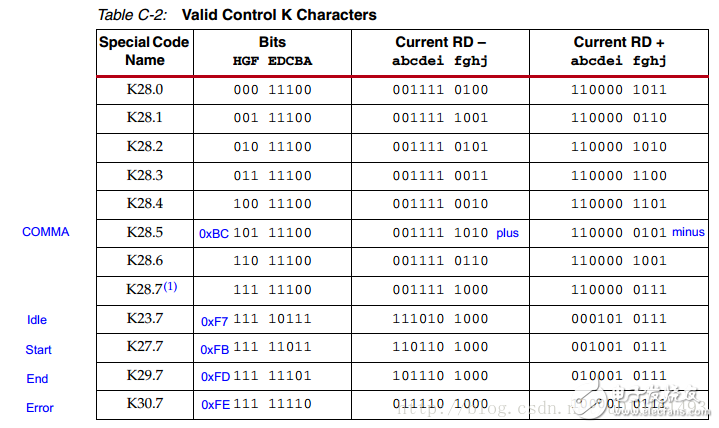
其中K28.1,K28.5,K28.7可以作为分隔码,也叫comma码,用于接收端在串行的数据流中找到字节边界。常用的K28.5即0xBC。因为正常传输的数据也可能有0xBC,怎么区分呢?是有一根单独的控制线,tx_is_K在传输K码时拉高,在传数据时拉低,去控制8b10b的编码模块到底是编码成数据还是控制K码。
四、Xilinx Serdes的几个细节
1.COMMA码使用
K28.5,0xBC,+0101_111100,-1010_000011; 为检测字节分割。
使用其它K码,作为帧开始,帧结束,时钟修正和数据对齐。
2.多字节处理
在数据率比较高的时候,外部位宽可能是2字(16位)或者4字(32位)。这是如果收发双方不约定好在高低哪个字发送comma码,这时是可以检测字边界,但接收端就会出现高低字节翻转的情况。在任意对于单COMMA的数据对齐,选择偶数字节对齐。发送的时候 0x5ABC-》2’b01。
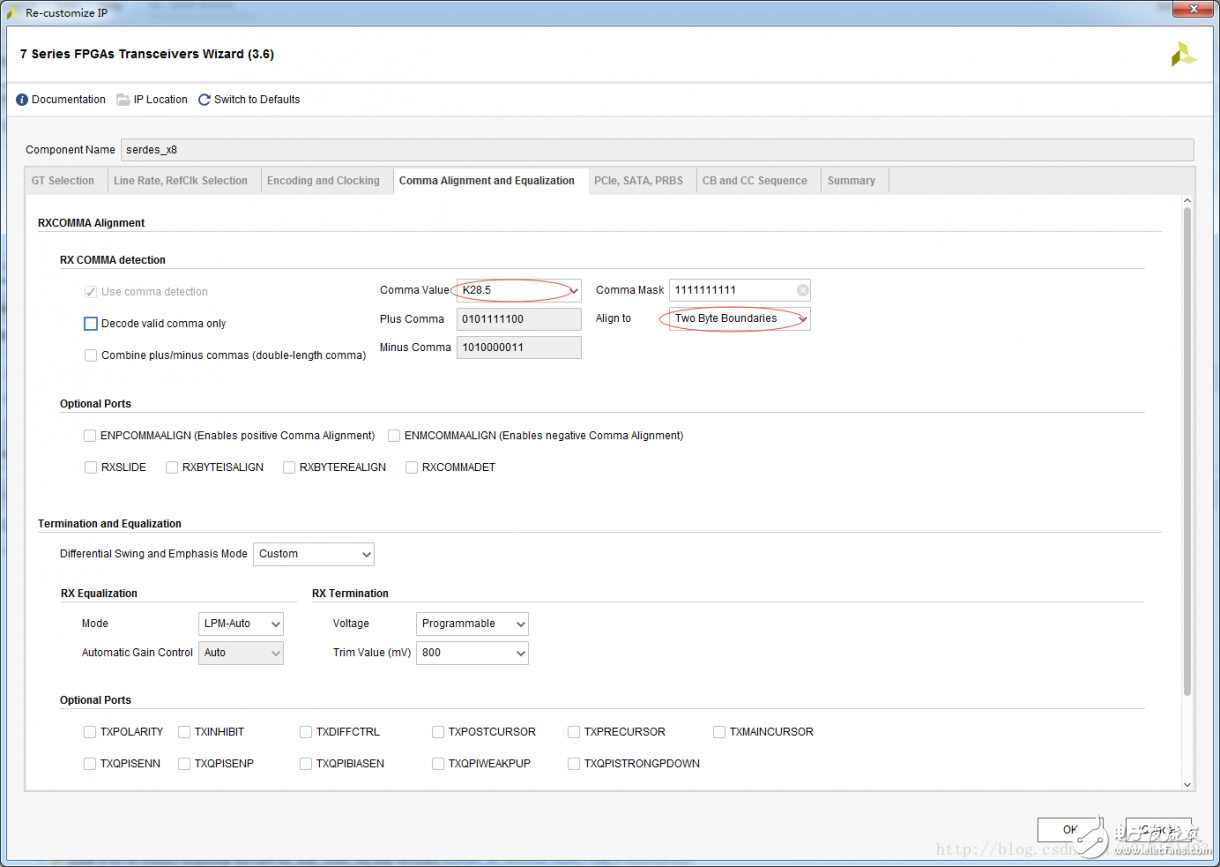
也可以选择发送组合的comma码,就是把NP的comma拼接起来发送,这样接收端就检测16bit的双字边界。也可以避免上面的情况出现。发送的时候0xBCBC-》2’b11

注意:decode valid comma only不要选,因为还可能发送其他的K码用于控制。反正8b10b是用的收发器硬核的资源,不用白不用。
3、环回设置:
1.“000”:正常模式
2.“001”:近端PCS环回
3.“010”:近端PMA环回
4.“100”:远端PMA环回
5.“110”:远端PCS环回
注意Xilinx例化的example的文件中配置的环回是预留环回接口的意思,仍然需要另外手动配置。
4、fsm_down状态机
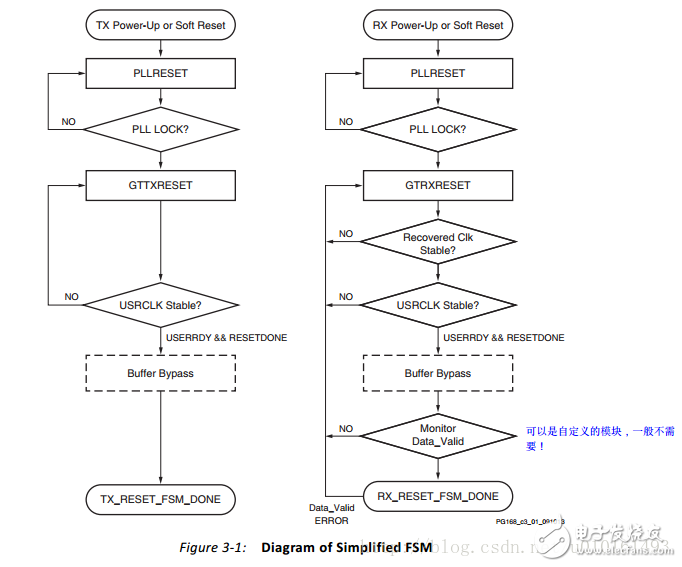
在Monitor Data_Valid模块,是用的frame_check的正确的信号,校验失败会导致复位GTrxreset。可以不用这个反馈,直接置1。需要手动改一下。
-
收发器
+关注
关注
10文章
3428浏览量
105999 -
Xilinx
+关注
关注
71文章
2167浏览量
121402
发布评论请先 登录
相关推荐
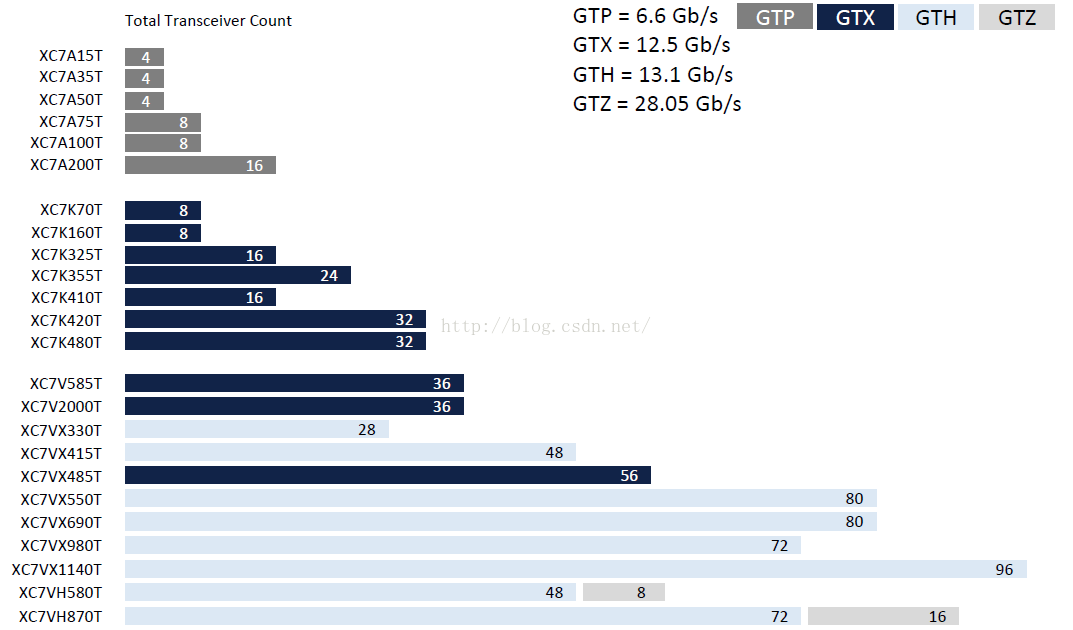
FPGA设计之GTP、GTX、GTH以及GTZ四种串行高速收发器
一文详解Xilinx GTX/GTH及2D eye scan的基本原理
FPGA高速收发器设计要遵循哪些原则?
XILINX收发器问题的解决
介绍Xilinx 7系列FPGA收发器硬件设计主要注意的一些问题
FPGA高速收发器设计原则
Xilinx 58Gb/s PAM4收发器的演示
关于高速串行收发器的重要概念和注意事项
Xilinx 7系列FPGA收发器架构之硬件设计指导(一)

介绍一种采用光SerDes而非电SerDes的高速收发器
SERDES关键威廉希尔官方网站





 工商网监
工商网监
评论